1、Hand-held radar mapping
1、Hand-held radar mapping1.1、Mapping1.1.1、gmapping1.1.2、hector1.1.3、karto1.1.4、cartographer1.2、Save map1.3、View related information
Gmapping:http://wiki.ros.org/gmapping/
hector_slam:http://wiki.ros.org/hector_slam
hector_slam/Tutorials:http://wiki.ros.org/hector_slam/Tutorials/SettingUpForYourRobot
hector_mapping:http://wiki.ros.org/hector_mapping
karto:http://wiki.ros.org/slam_karto
Cartographer:https://google-cartographer.readthedocs.io/en/latest/
Cartographer ROS:https://google-cartographer-ros.readthedocs.io/en/latest/
rrt_exploration:http://wiki.ros.org/rrt_exploration
rrt_exploration/Tutorials:http://wiki.ros.org/rrt_exploration/Tutorials
map_server:https://wiki.ros.org/map_server
1.1、Mapping
Install dependent libraries
sudo apt install ros-melodic-moveit ros-melodic-moveit-visual-tools ros-melodic-kdl-* ros-melodic-joint-state-publisher-gui ros-melodic-trac-ik liborocos-kdl-dev ros-melodic-teleop-twist-keyboard ros-melodic-moveit-resources ros-melodic-navigation ros-melodic-gmapping ros-melodic-hector-slam ros-melodic-slam-karto ros-melodic-robot-state-publisher ros-melodic-geographic-msgs ros-melodic-libuvc-* ros-melodic-rtabmap-ros libavformat-dev libavcodec-dev libswresample-dev libswscale-dev libavutil-dev libsdl1.2-dev ros-melodic-libuv ros-melodic-pointcloud-to-laserscan ros-melodic-mbf-msgs ros-melodic-mbf-costmap-core ros-melodic-costmap-converter ros-melodic-bfl ros-melodic-serial ros-melodic-teleop-twist-joy ros-melodic-laser-proc ros-melodic-rosserial-arduino ros-melodic-rosserial-python ros-melodic-rosserial-server ros-melodic-rosserial-client ros-melodic-rosserial-msgs ros-melodic-amcl ros-melodic-map-server ros-melodic-urdf ros-melodic-xacro ros-melodic-interactive-markers ros-melodic-octomap* ros-melodic-joy* ros-melodic-dwa-local-planner ros-melodic-multirobot-map-merge python-catkin-tools python3-dev python3-catkin-pkg-modules python3-numpy python3-yaml build-essential ros-melodic-imu-tools ros-melodic-cartographer*
If it is a new environment, you need to copy the lua file and launch file of cartographer to the corresponding location
xxxxxxxxxxcd ~/rplidar_ws/src/transbot_nav/scripts/sudo bash create.sh
Build map start command
xxxxxxxxxxroslaunch transbot_nav laser_map.launch lidar_type:=a1 map_type:=gmapping robot_model:=astralidar_type parameter: the type of lidar used: [a1, a2, a3, s1, s2], the default is [a1].
map_type parameter: mapping algorithm [gmapping, hector, karto, cartographer], the default is [gmapping].
robot_model parameters: simulation model [astra, camera].
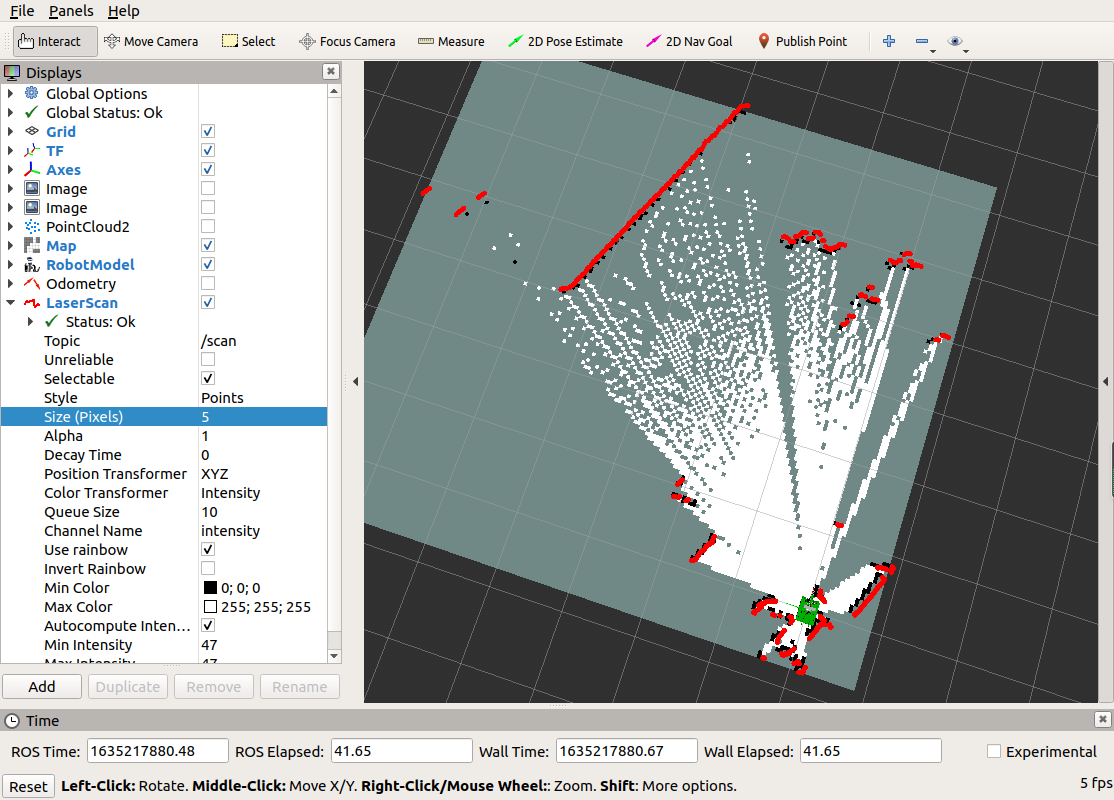
When creating a map in rviz, if [LaserScan] reports an error and fails to load the lidar data; select it, click [Remove] to remove it, and click [Add] to add it again. Just select the corresponding topic.
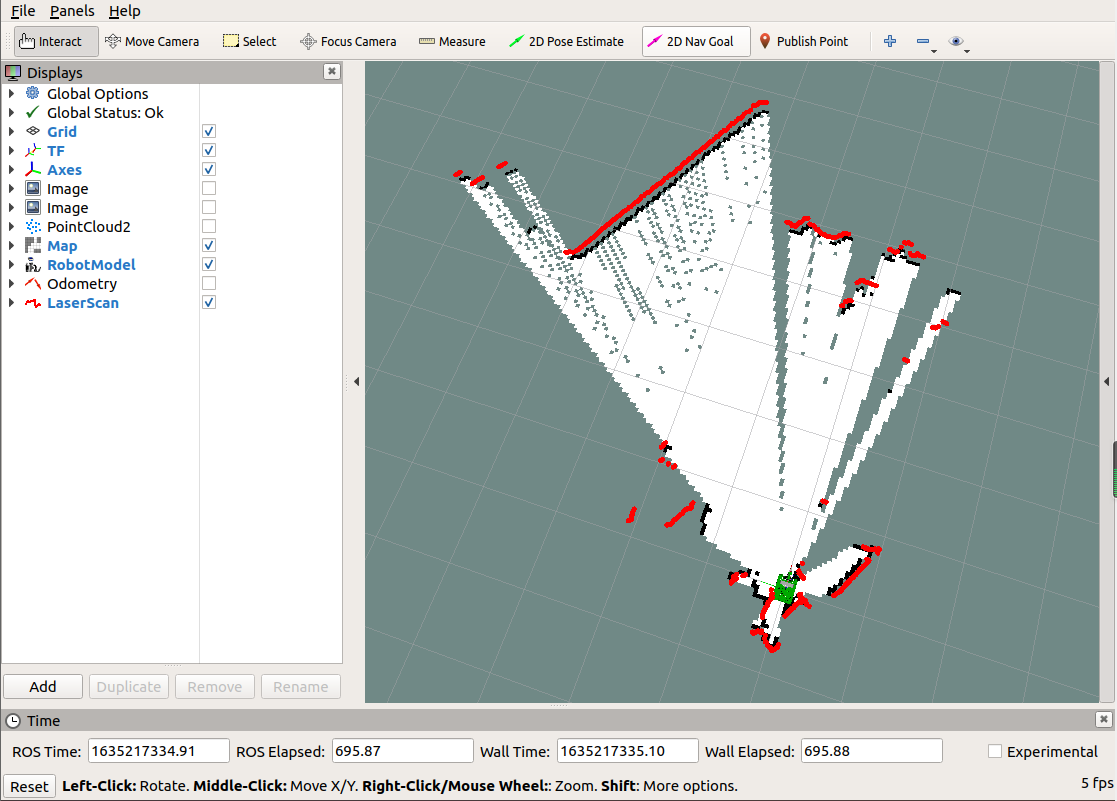
1.1.1、gmapping
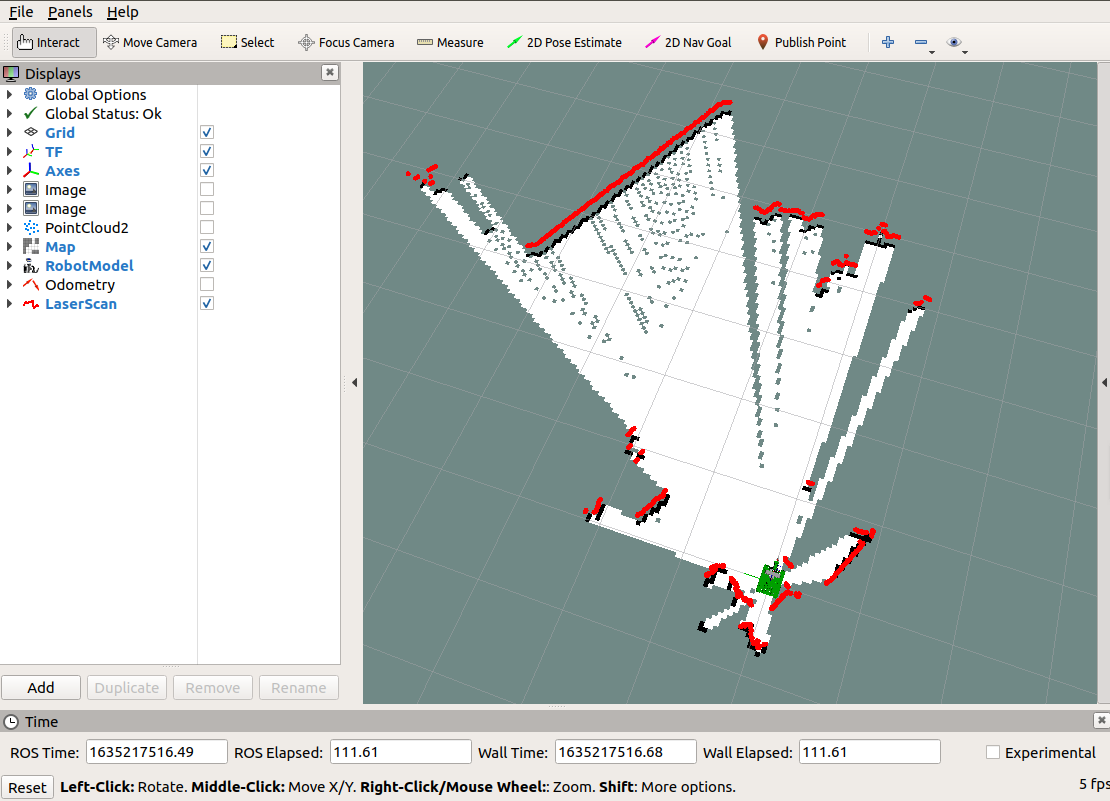
1.1.2、hector
1.1.3、karto
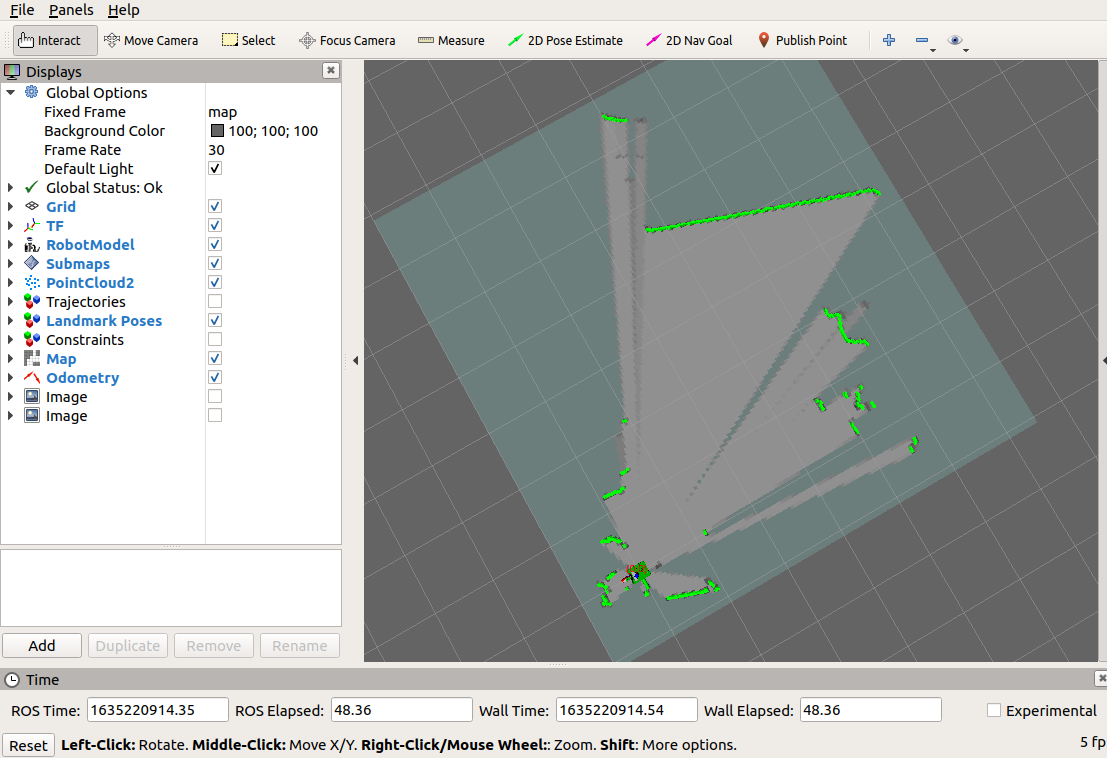
1.1.4、cartographer
1.2、Save map
Several mapping algorithms save maps in different ways.
- cartographer: execute the following commands
xxxxxxxxxxbash ~/rplidar_ws/src/transbot_nav/maps/carto_map.sh
- gmapping,hector,karto:Execute the following command to save.
xxxxxxxxxxrosrun map_server map_saver -f ~/rplidar_ws/src/transbot_nav/maps/my_map # Method 1bash ~/rplidar_ws/src/transbot_nav/maps/map.sh # Method 2The map will be saved this path: ~/rplidar_ws/src/transbot_nav/maps/
one pgm picture,one yaml file.
map.yaml
xxxxxxxxxximage: map.pgmresolution: 0.05 origin: [-15.4,-12.2,0.0] negate: 0occupied_thresh: 0.65free_thresh: 0.196Parameter analysis:
- image: The path of the map file, which can be an absolute path or a relative path
- resolution: The resolution of the map, m/pixel
- origin: The 2D pose (x,y,yaw) in the lower left corner of the map, where yaw is rotated counterclockwise (yaw=0 means no rotation). Many parts of the current system ignore the yaw value.
- negate: Whether to reverse the meaning of white/black and free/occupied (the interpretation of the threshold is not affected)
- occupied_thresh: Pixels with occupation probability greater than this threshold will be considered as fully occupied.
- free_thresh: Pixels whose occupancy probability is less than this threshold will be considered completely free.
1.3、View related information
View tf tree
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree
View node
xxxxxxxxxxrqt_graph