4.2 OpenCV
4.2.1 About OpenCV
The name of OpenCV is Open Source Computer Vision Library, an open source computer vision library. As shown in the above figure, we see the OpenCV logo, which can be seen by three small rings of distinct R, G, and B primary colors. That is, it is a set of API libraries for open source code for computer vision.
This means that:
(1) Whether it is scientific research or commercial application, it can be used for development;
(2) The source code of all API functions is public, you can see the program steps of its internal implementation;
(3) You can modify the source code of OpenCV and compile and generate the specific API functions you need.
Part of the image processing on Jetbot also uses some functions of OpenCV's library. If you are interested in the development of Opencv computer vision library and want to know more about it, here are a few websites for your reference study:
OpenCV official homepage: https://www.opencv.org
OpenCV Chinese Forum: http://www.opencv.org.cn
OpenCV CSDN Forum: https://bbs.csdn.net/forums/OpenCV
4.2.2 Image reading and saving
img = cv2.imread('yahboom.jpg', 0) :The first argument is the path to the image, and the second argument is how to read the image.
cv2.IMREAD_COLOR:Read the image in grayscale mode, which can be represented by 0;
cv2.IMREAD_GRAYSCALE,1:read in a color picture, which can be represented by 1;
cv2.IMREAD_UNCHANGED:Read in an image and include its alpha channel, which can be represented by 2. 2, the image is saved;
cv2.imwrite(‘car.jpg’, img) :The first parameter is the name of saved file and the second parameter is the saved image.
4.2.3 Video stream read and save
Learn to read, display and save videos. The functions are cv2.VideoCapture() and cv2.VideoWrite();
Get the video stream from the camera:
Open the camera: cap = cv2.VideoCapture(0)
The parameter 0 indicates the default camera of the device. When the device has multiple cameras, the parameter selection can be changed.
Read the video stream of the camera: ret, frame = cap.read()
No parameters, but need to be placed in an infinite loop to continuously read the video
Release camera resources: cap.release()
No parameters, be sure to turn off the camera and release resources before the program closes.
Read the video file: cap = cv2.VideoCapture(‘filename’)
In the Jetbot robot car camera driver camera.py, this function is used to obtain the video stream data of the camera.
super(Camera, self).__init__(*args, **kwargs) try: self.cap = cv2.VideoCapture(self._gst_str(), cv2.CAP_GSTREAMER) re, image = self.cap.read()Save video:
Create a VideoWriter object and specify the output file name
Specify the use of the XVID encoder:
fourcc = cv2.VideoWriter_fourcc(*’XVID’)
Specify the output file:
out = cv2.VideoWriter(‘output.avi’, fourcc, 20.0, (640,480))
The above function parameters in turn represent the output video name, encoder, frame rate, frame width and height.
4.2.4 Draw lines, rectangles, circles, and write text
Learn to draw different geometry using OpenCV, the related functions are cv2.line(), cv2.circle(), cv2.rectangle(), cv2.putText(), etc.
Draw a line:
xxxxxxxxxxcv2.line(img, startPoint, endPoint, color, thickness)About parameter:
| img | The target image object that needs to be drawn |
|---|---|
| startPoint | Starting position pixel coordinates |
| endPoint | Ending position pixel coordinates |
| color | Draw the color of line used |
| thickness | Draw the width of line used |
Draw a circle:
xxxxxxxxxxcv2.circle(img, centerPoint, radius, color, thickness)
About parameter:
| img | The target image object that needs to be drawn |
|---|---|
| centerPoint | Pixel coordinates of the center of the circle |
| radius | The radius of the drawn circle |
| color | Draw the color of line used |
| thickness | Draw the width of line used |
Draw a rectangle:
xxxxxxxxxxcv2.rectangle(img, point1, point2, color, thickness)
Point1 is the upper left vertex and point2 is the other vertex on point1 diagonal
About parameter:
| img | Target image object to draw |
|---|---|
| point1 | Top left vertex position pixel coordinates |
| point2 | Bottom right vertex position pixel coordinates |
| color | Draw the color of line used |
| thickness | Draw the width of line used |
Write text:
xxxxxxxxxxcv2.putText( img, text, point, font, size, color, thickness )
Text is the text to be written, point is the lower left coordinate of the first character, font is the font type, and size is the font size.
About parameter:
| img | Target image object to draw |
|---|---|
| text | Drawn text |
| point | Top left vertex position pixel coordinates |
| font | Drawn text format |
| size | The size of the text drawn |
| color | Draw the color of line used |
| thickness | Draw the width of line used |
4.2.5 OpenCV image scaling (cv2.resize)
This function is particularly important when using the multi-AI model framework. Because if our application needs to use two different frameworks or models trained by different training methods, but we set the capture from the beginning of the camera. The image resolution is fixed, and the resolution of their model operations is inconsistent.
At this time, we can use the image scaling function of OpenCV to scale the image to the target resolution for AI operation.
Function prototype:
xxxxxxxxxxcv2.resize(InputArray src, OutputArray dst, Size, fx, fy, interpolation)
About parameter:
| InputArray src | Input picture |
|---|---|
| OutputArray dst | Output picture |
| Size | Size of picture |
| fx, fy | Zoom factor along the x-axis, y-axis |
| interpolation | Insertion method |
4.2.6 HSV color space and color space conversion (RGB-HSV)
Introduction to HSV color space:
The RGB color space, that is, the three primary color spaces, any one of which can be a mixture of the three colors. However, the effective processing of the image in the color space is generally performed in the HSV space. HSV (Hue, Saturation, Brightness Value) is a color space created according to the intuitive characteristics of the color, also called the hexagonal cone model. As shown below.

Conversion of three color spaces (gray BGR HSV):
There are more than 150 methods of color space conversion in OpenCV, but there are only two of them that we often use, namely BGR->Gray and BGR->HSV. Note that Gray and HSV cannot be converted to each other. Color space conversion: cv2.cvtColor(input_image, flag)
BGR->Gray: flag is cv2.COLOR_BGR2GRAY
BGR->HSV: flag is cv2.COLOR_BGR2HSV
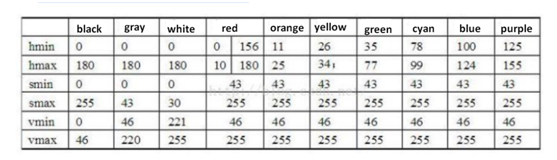
The value range of the HSV color space in OpenCV:
H [0, 179] S [0, 255] V [0, 255]
Range of commonly used colors, as shown below.