6、Data conversion and point cloud
6、Data conversion and point cloud6.1、scan to image6.2、ROS and PCD6.3、PCL 3D point cloud.6.3.1、Start up6.2.3、Point cloud visualization
6.1、scan to image
Start up lidar
roslaunch rplidar_ros rplidar.launch - Start up
xxxxxxxxxxroslaunch transbot_visual laser_to_image.launchrosrun transbot_visual laser_to_image.py
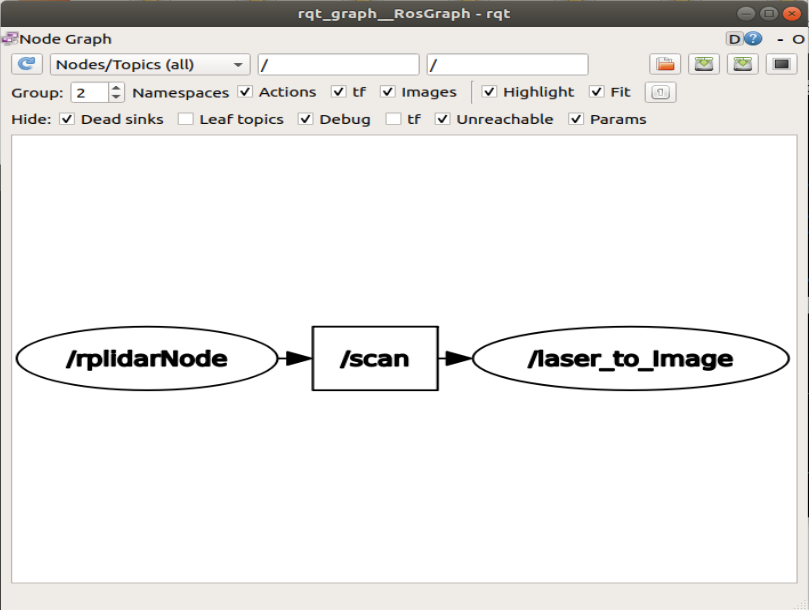
- View node graph
xxxxxxxxxxrqt_graph
- py Code analysis
Create subscribers and publishers
xxxxxxxxxxself.laserSub = rospy.Subscriber("/scan", LaserScan, self.laserCallback) # Receiving scan nodeself.image_pub = rospy.Publisher('/laserImage', Image, queue_size=1) # Publish the converted image informationProcess the data in the callback function [self.laserCallback()] and publish it
xxxxxxxxxxdef laserCallback(self, data): # Extract the received lidar data and convert it into point cloud data cloud_out = self.laserProj.projectLaser(data) lidar = point_cloud2.read_points(cloud_out) points = np.array(list(lidar)) # Convert point cloud data into image data img = self.pointcloud_to_laserImage(points) # Convert image data into ROS image information and publish self.image_pub.publish(self.bridge.cv2_to_imgmsg(img)) img=cv.resize(img,(640,480)) cv.imshow("img", img) cv.waitKey(10) ROS_INFO("Published ... ");6.2、ROS and PCD
Introduce several tools running on several ROS nodes. Their role is to convert between format point cloud or package and point cloud data (PCD file format).
Start the Astra camera
xxxxxxxxxxroslaunch astra_camera astrapro.launchPoint cloud display: rviz (start the rviz command, select the corresponding topic, modify the parameters, and present different effects); pcl_visualization tool.
xxxxxxxxxxroslaunch transbot_visual pointCloud_visualize.launch cloud_topic:=/camera/depth_registered/points(1)pointcloud_to_pcd
xxxxxxxxxxrosrun pcl_ros pointcloud_to_pcd input:=/camera/depth/points rosrun pcl_ros pointcloud_to_pcd input:=/camera/depth_registered/points Save the ROS point cloud message in the specified PCD file.
(2)convert_pcd_to_image
xxxxxxxxxxrosrun pcl_ros convert_pcd_to_image <cloud.pcd>Load a PCD file and publish it as a ROS image message five times per second.
(3)convert_pointcloud_to_image
xxxxxxxxxxrosrun pcl_ros convert_pointcloud_to_image input:=/camera/depth_registered/points output:=/my_imageView image: rosrun image_view image_view image:=/my_imageSubscribe to a topic of ROS point cloud and publish it with image information.
(4)pcd_to_pointcloud
xxxxxxxxxxrosrun pcl_ros pcd_to_pointcloud <file.pcd> [ <interval> ]
Load a PCD file and publish one or more times as a ROS point cloud message.
- file.pcd:The name of the (required) file to be read.
- interval :(Optional) The number of seconds to sleep between messages. If the parameter [interval] is zero or not specified, the message will be published once.
xxxxxxxxxxroslaunch transbot_visual pointCloud_visualize.launch cloud_topic:=/cloud_pcd(5)bag_to_pcd
rosbag recording
Order: rosbag record topic1 [topic2 topic3 ...]
xxxxxxxxxxrosbag record /camera/depth_registered/points
bag_to_pcd
xxxxxxxxxxrosrun pcl_ros bag_to_pcd <input_file.bag> <topic> <output_directory>#Eg:rosrun pcl_ros bag_to_pcd 2021-09-09-11-41-56.bag /camera/depth_registered/points my_pcdRead a package file and save the ROS point cloud message in the specified PCD file. This requires a bag file.
6.3、PCL 3D point cloud.
6.3.1、Start up
Release point cloud, the launch file contains the launch of rviz. So I can clearly see a cloud of dots flashing in the middle of rviz.
xxxxxxxxxxroslaunch transbot_visual pointCloud_pub.launch
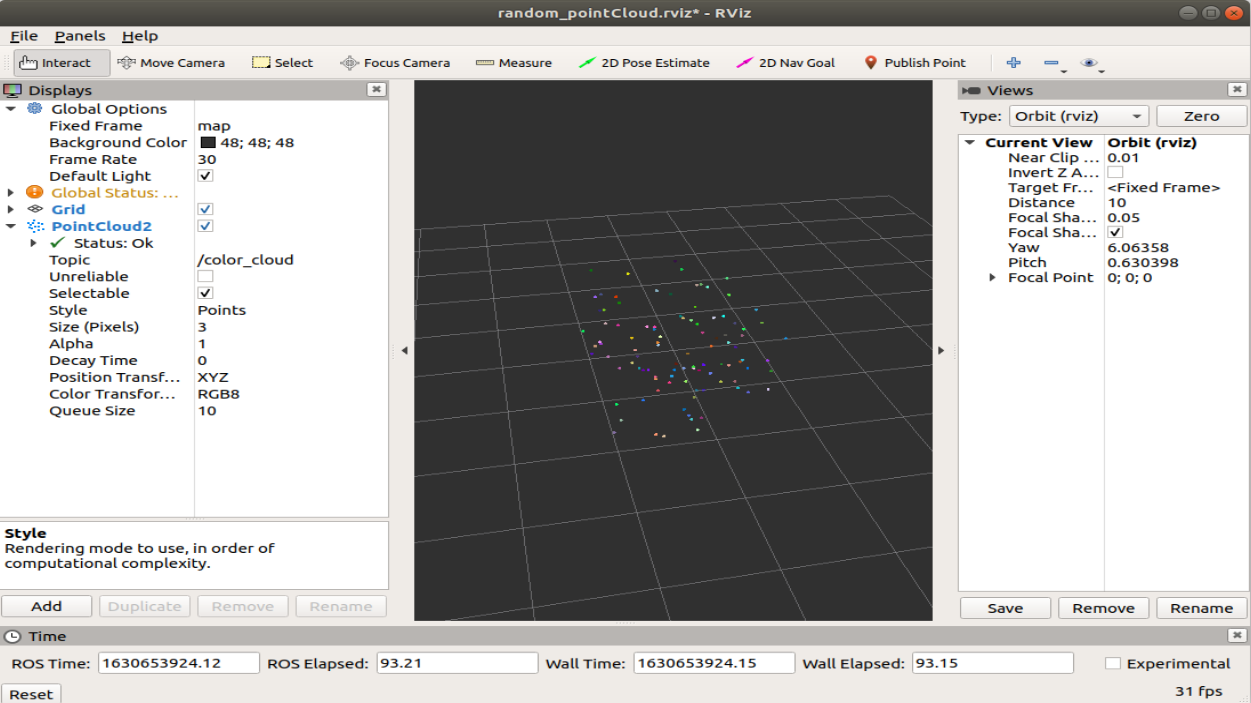
Another way to start, this way you need to manually start [rviz], and add the component [PointCloud2] to select the topic [/color_cloud].
xxxxxxxxxxroscorerosrun transbot_visual pointCloud_pub
- Code analysis
Code path: ~/transbot_ws/src/transbot_visual/src/pub_pointCloud.cpp
6.2.3、Point cloud visualization
- rviz
xxxxxxxxxxrviz
- pcl_visualization
Start up command
xxxxxxxxxxroslaunch transbot_visual pointCloud_visualize.launchrosrun transbot_visual pointCloud_visualize

- shortcut key
【Ctrl】+【-】
【Shift】+【+】
【Alt】+【-】
【Alt】+【+】
- Code analysis
Code path: ~/transbot_ws/src/transbot_visual/src/pcl_visualize.cpp