2、Multi-robot navigation
2.1、Achieve effect
After starting this function, two or more transbot robots can be displayed in the same rviz, and they can be positioned and navigated separately without affecting each other.
2.2、Preparation
Before enabling this function, it is necessary to enable distributed communication between the virtual machine and the transbot robot. Let the transbot be the slave and the virtual machine as the host.
At this time. The map file is loaded on the virtual machine Below we use two transbot robots as examples to demonstrate this function.
2.3、Start up
2.3.1、Virtual machine side
1)、Start up roscore
roscore
2)、Load map file
xxxxxxxxxxroslaunch transbot_nav transbot_map_server.launch
2.3.2、transbot side
1)、transbot1 side
xxxxxxxxxxroslaunch transbot_mulity transbot_mulity_control.launch namespace:=robot1 is_mulity:=trueroslaunch transbot_mulity transbot_mulity_nav.launch namespace:=robot1
2)、transbot2 side
xxxxxxxxxxroslaunch transbot_mulity transbot_mulity_control.launch namespace:=robot2 is_mulity:=trueroslaunch transbot_mulity transbot_mulity_nav.launch namespace:=robot2
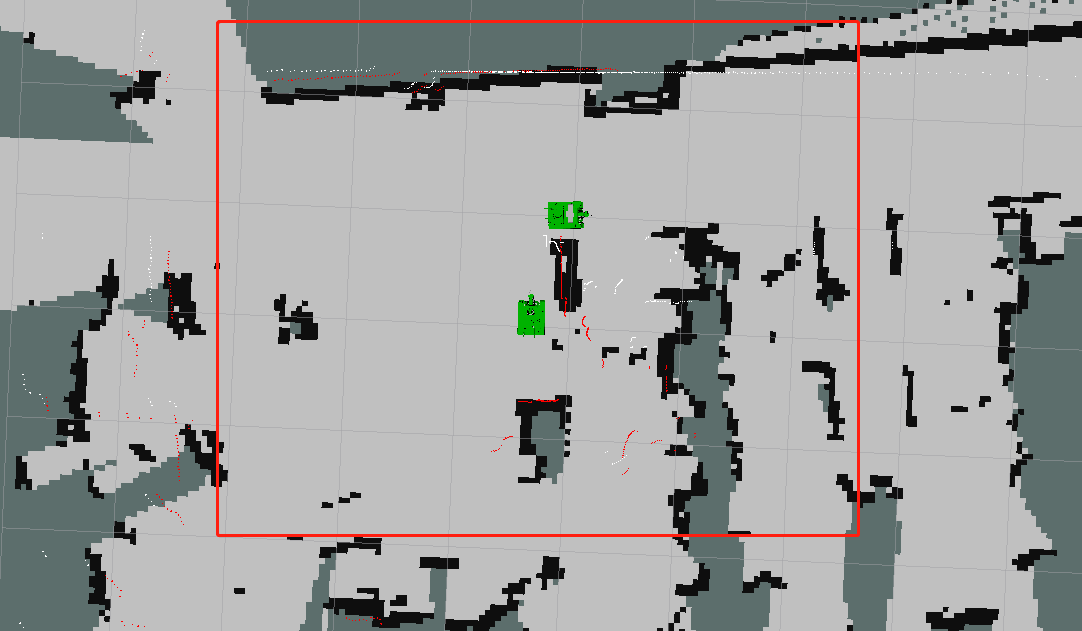
After all the above parts are successfully started, the system will load two transbot models in rviz on the virtual machine side, as shown below.
2.3.3、Positioning and Navigation
1)、Positioning
We can find these four icons on rviz, as shown below.
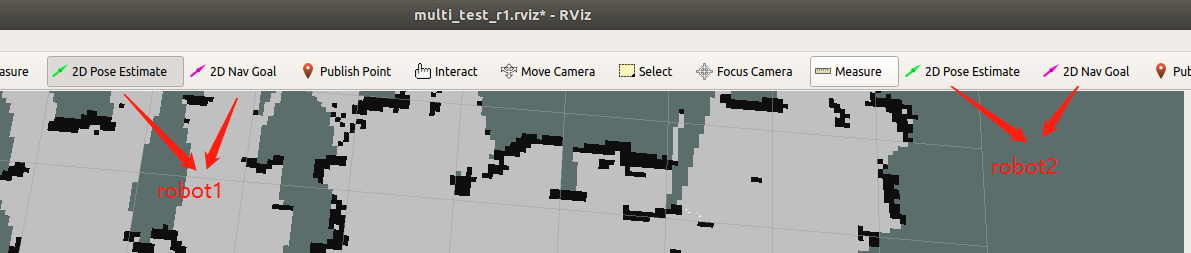
这两组分别代表的是transbot1的初始位姿调整(定位)和给定目标点(导航)、transbot2的初始位姿调整(定位)和给定目标点(导航)。
依次使用两个绿色的箭头,给两台transbot分别定位。
These two groups represent the initial pose adjustment (positioning) and given target point (navigation) of No.1 transbot, and the initial pose adjustment (positioning) and given target point (navigation) of No.2 transbot.
Use the two green arrows in turn to locate the two transbot robot respectively.
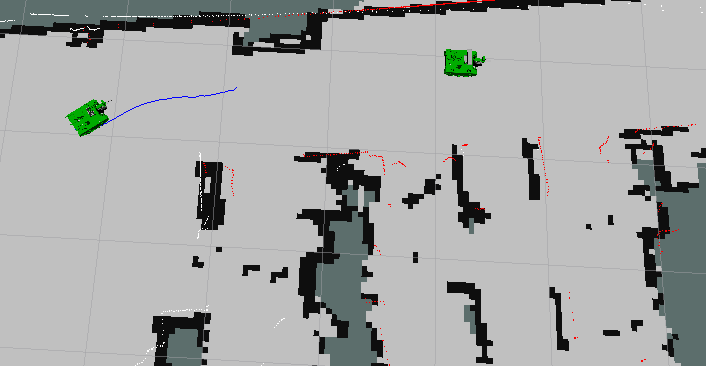
2)、Navigation
Use the two purple arrows in turn to navigate the two transbot robot separately.
2.3.4、Principle
launch file location:
xxxxxxxxxx/home/jetson/transbot_ws/src/transbot_mulity/launch/transbot_mulity_control.launch/home/jetson/transbot_ws/src/transbot_mulity/launch/transbot_mulity_nav.launch
2.3.5、Phenomenon