4.4 Ultrasonic sensor
1. Learning Objectives
In this course, we will learn how to use ultrasonic sensors on Raspberry Pi Pico robot.
2. About Hardware
We need use ultrasonic sensor and OLED on Pico robot.
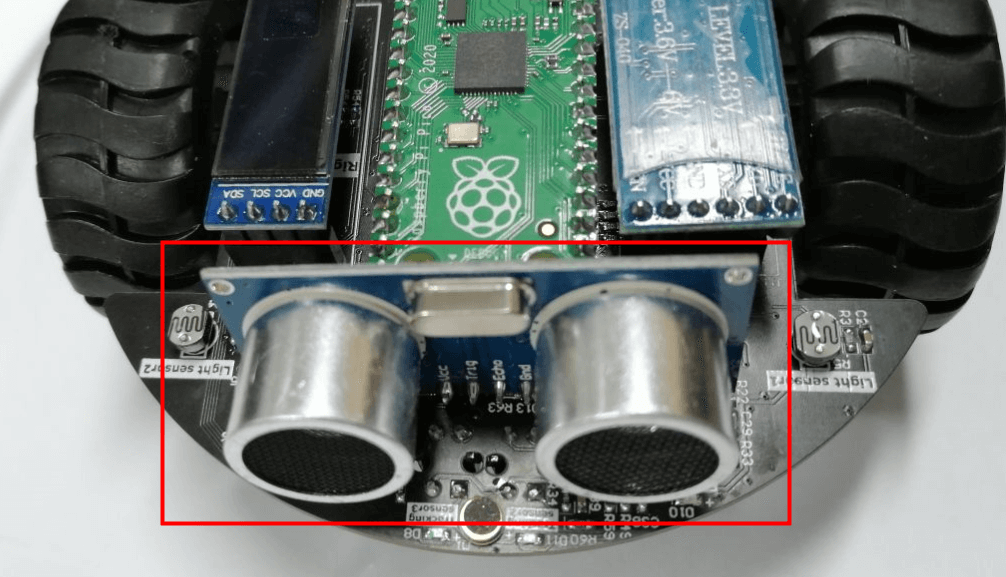
The ultrasonic module is a sensor that uses ultrasonic characteristics to detect the distance. It has two ultrasonic probes for transmitting and receiving ultrasonic waves. The range of measurement is 3-450 cm.
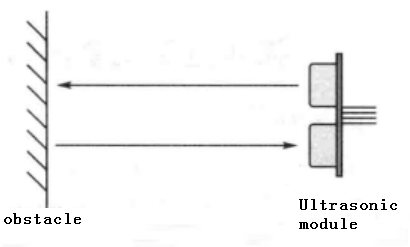
(1) You need to input a high level signal of at least 10us to the Trig pin to trigger the ranging function of the ultrasonic module.

(2) After the ranging function is triggered, the module will automatically send out 8 ultrasonic pulses with 40 kHz and automatically detect whether there is a signal return. This step is done internally by the module.![]()

(3) When the module detects an echo signal, the ECHO pin will output a high level. The high level duration is the time from when the ultrasonic wave is sent to when it returns. You can calculate the distance by using the time function to calculate the high level duration.
Formula: Distance = High level duration * Speed of sound(340M/S)/2.
3. About Code
Code path: Code -> 2.Advanced course -> 4. Ultrasonic sensor.py
ximport timefrom machine import Pin, I2Cfrom pico_car import SSD1306_I2C, ultrasonic#initialization ultrasonicultrasonic = ultrasonic()#initialization oledi2c=I2C(1, scl=Pin(15),sda=Pin(14), freq=100000)oled = SSD1306_I2C(128, 32, i2c)
while True: #get distance distance = ultrasonic.Distance_accurate() print("distance is %d cm"%(distance) ) #display distance oled.text('distance:', 0, 0) oled.text(str(distance), 75, 0) oled.show() oled.fill(0) time.sleep(1)
from pico_car import SSD1306_I2C, ultrasonic
Use SSD1306_I2C and ultrasonic from pico_car, which is our packaged OLED and ultrasonic library.
import time
The "time" library. This library handles everything time related, from measuring it to inserting delays into programs. The unit is seconds.
from machine import Pin, I2C
The machine library contains all the instructions that MicroPython needs to communicate with Pico and other MicroPython-compatible devices, extending the language of physical computing, using the Pin and I2C libraries here.
i2c=I2C(1, scl=Pin(15), sda=Pin(14), freq=100000)
Set the IIC 1 pin to SCL 15, SDA 14, and the frequency to 100000.
oled = SSD1306_I2C(128, 32, i2c)
Initialize the size of the OLED to 128*32, and pass in the IIC parameters set earlier.
ultrasonic = ultrasonic()
Initialize ultrasonic ranging.
distance = ultrasonic.Distance_accurate()
Assign the value returned by ultrasonic ranging to the variable distance .
oled.show()
Display the set OLED content.
oled.fill(0)
Clear the settings and prepare for the next display.
oled.text(str(distance), 75, 0)
Convert the distance to a string to display on the OLED at position 75,0.
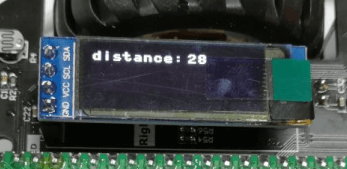
4. Experimental Phenomenon
After the code is downloaded, we can see that the OLED displays 'distance: ' and the measured distance. The value will change according to the measurement result.
At the same time, the print shell will also print the measured distance.
Note: The shortest ultrasonic measurement distance is 2-3 cm.