STM32 basic routines
STM32 basic routines 1. The purpose of the experiment 2. Configure pin information 3. Analysis of the experimental flow chart 4. Core code explanation 5. Hardware connection 6. Experimental effect
1. The purpose of the experiment
Use the serial communication of STM32 to analyze the SBUS protocol data transmitted by the remote control transmitter of the model aircraft, and print the value of each channel.
2. Configure pin information
Since the STM32 chip is required, it is used here with the ROS expansion board. By default, the construction of the STM32CUBE development environment is taken as an example. If you need to view the development environment construction, please click 4.2 STM32 Development Environment (http://www.yahboom.net/study/rosmaster-x3) .
- Copy the SBUS project folder to the project directory, and then import the ioc file.
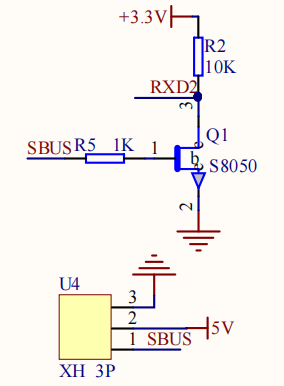
According to the schematic diagram, SBUS is connected to the RX pin of serial port 2, only receiving but not sending.

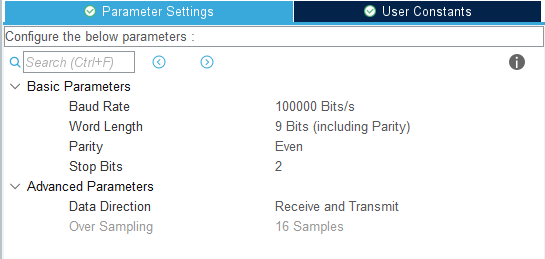
- Change the mode of serial port 2 to Asynchronous synchronous communication, the baud rate is 100000, the data width: 9 bits, the test: Even, the stop bit: 2 bits. Serial port 2 only uses the receive function, so Data Direction can choose Receive and Transmit or Receive Only.
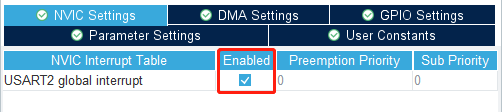
- Open the serial port 2 interrupt settings.
3. Analysis of the experimental flow chart
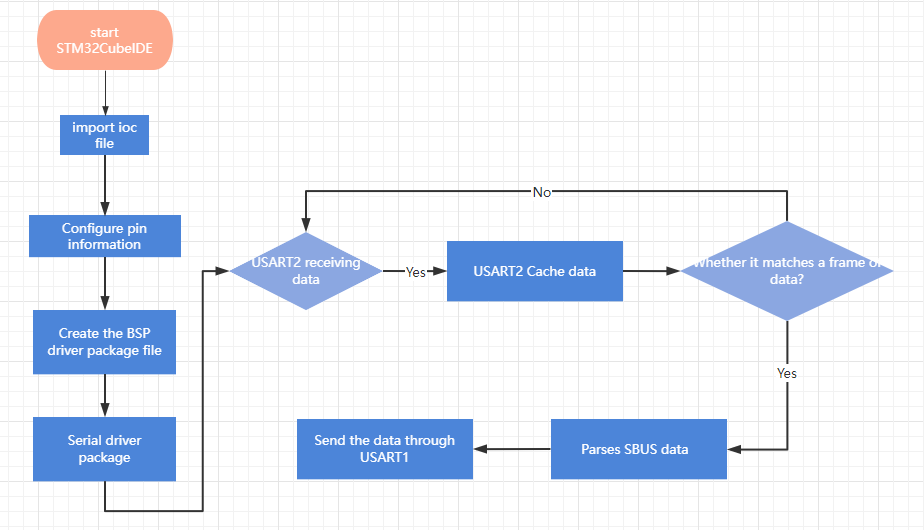
4. Core code explanation
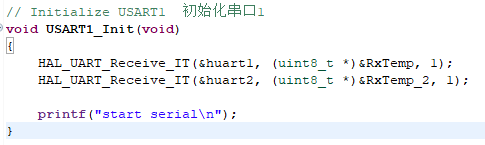
- Content in bsp_uart.c:
USART1_Init(): Initialize the serial port related content, open serial port 1 and serial port 2 to receive 1 data.
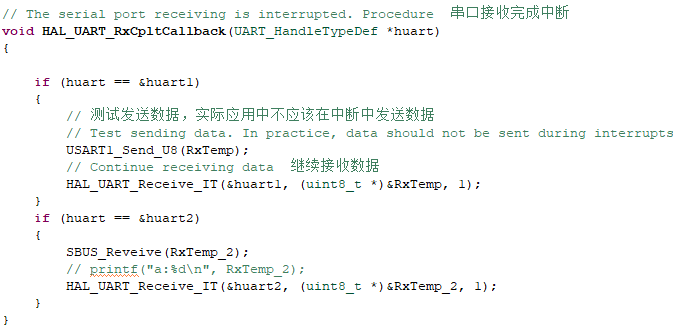
2. In the serial port interrupt callback, judge whether serial port 2 data is received, and at the same time distinguish whether serial port 1 or serial port 2 has received the data.
3. Create new bsp_sbus.h and bsp_sbus.c files to manage sbus data analysis content. Create the following in bsp_sbus.h:
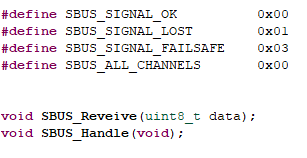
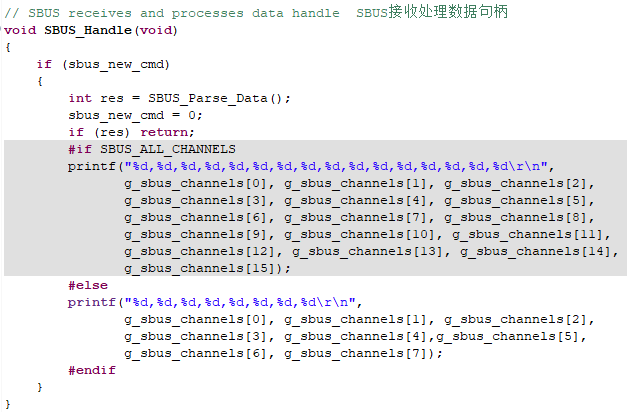
Among them, SBUS_ALL_CHANNELS controls the number of channels parsed. By default, only eight channels are displayed. If full channel display is required, modify it to 1.
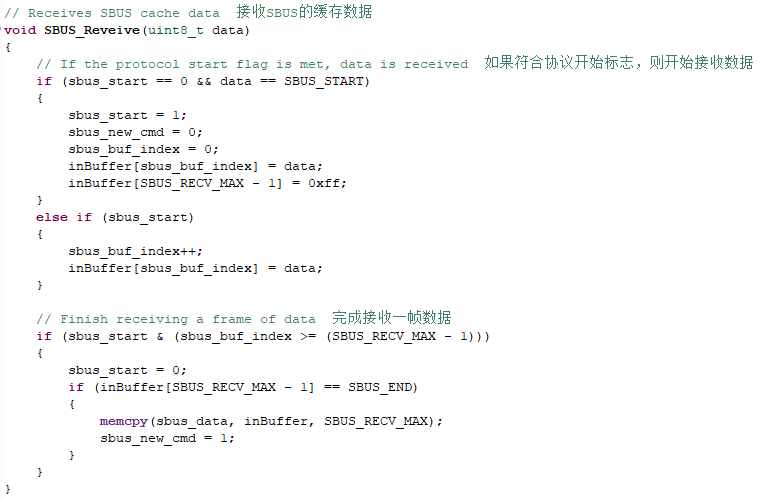
4. SBUS_Reveive(data) receives the data of the serial port as a buffer. If it conforms to the communication protocol of SBUS, it will update a frame of data to the sbus_data array.
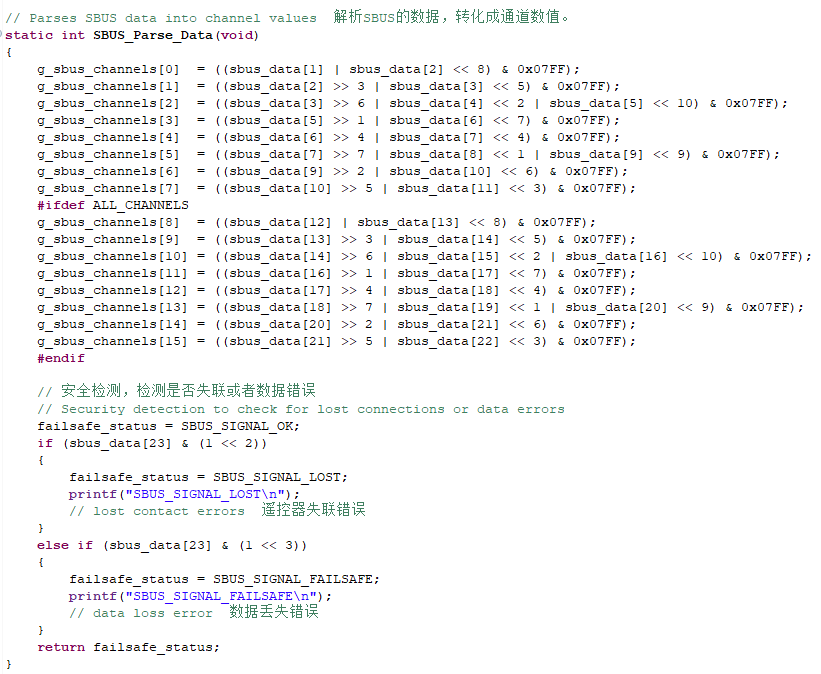
5. Analyze the data in sbus_data according to the SBUS communication protocol.
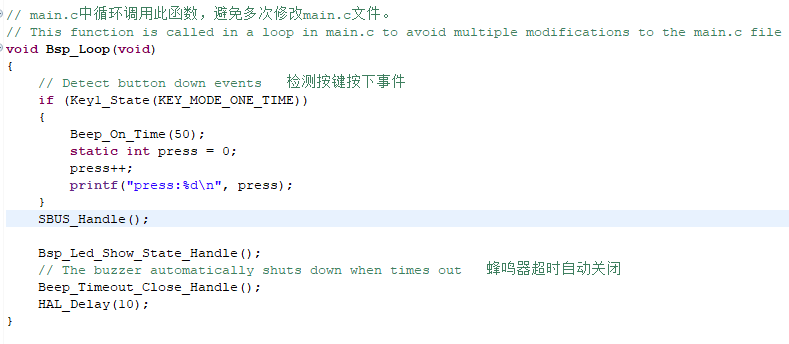
The SBUS_Handle() function is called cyclically in Bsp_Loop(), and the parsed data of each channel is printed out through serial port 1.
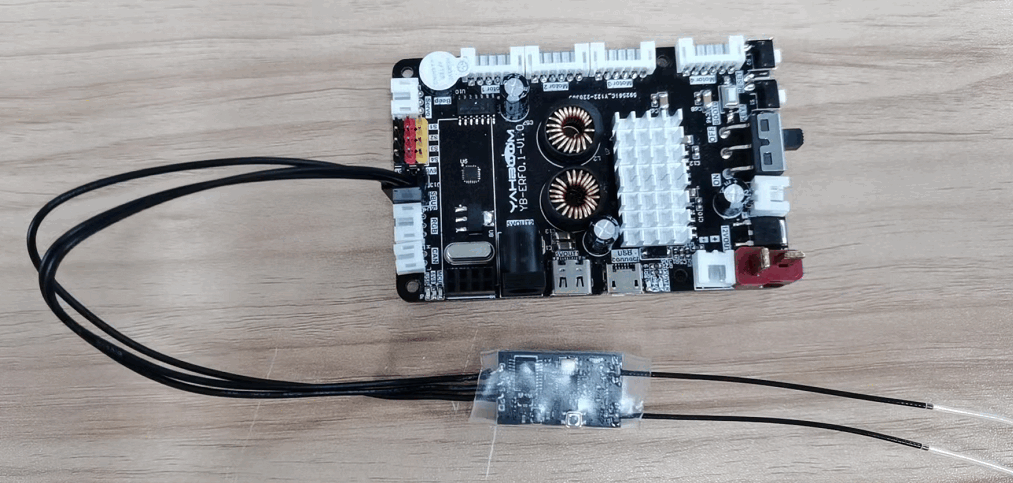
5. Hardware connection
Because SBUS communication needs to connect the SBUS receiver to the SBUS interface on the expansion board, S is connected to the signal, V is connected to the positive pole of the power supply, and G is connected to the ground. Therefore, you need to prepare your own model aircraft remote control and SBUS receiver, pair them in advance and turn on the power switch.
6. Experimental effect
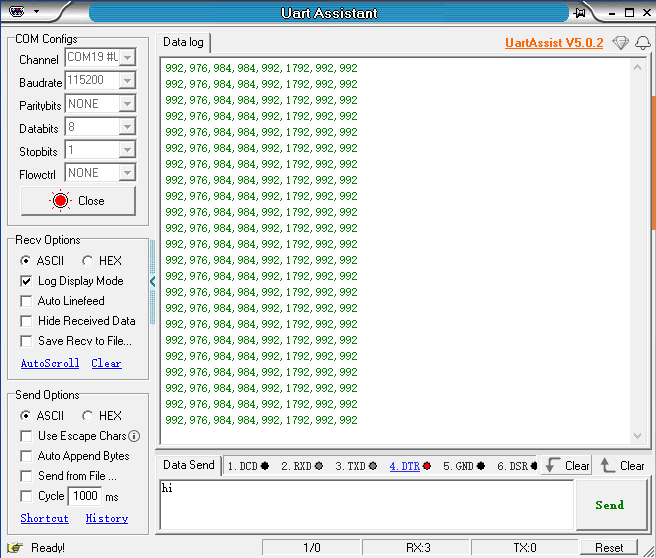
After burning the program to the ROS expansion board, the LED light flashes once every 200 milliseconds. After connecting the expansion board to the computer through the micro-USB data cable, open the serial port assistant (the specific parameters are shown in the figure below), you can see the serial port assistant on the Always print the data of each channel of the model aircraft remote control. When we manually toggle the joystick or button of the model aircraft remote control, the data will change accordingly.