How to use LD06_USB
Website:https://www.ldrobot.com/
Download tutorials:https://www.ldrobot.com/download/44
1、Use Yahboom image system
The system files provided by Yahboom have already configured ros and related environments,and users can use them directly. Password: yahboom
1.1、jupyter lab
Login method: Open Google Chrome, enter [IP:8888]; Password: [yahboom]
For example: Open Google Chrome and enter [http://192.168.2.76:8888].
1.2、vnc
Login method: After installing [vncviewer.exe] under Windows, double-click to open and enter [IPJ,and the login password: [yahboom].
2、Operating environment
OS: Ubuntu 18.04 LTS ROS version: melodic Equipment: jetson nano, Raspberry Pi, PC First, transplant the function package to the workspace; choose any of the following test methods.
Note: The command to update the environment variables must be executed every time the terminal is newly opened to execute the test command.
x
catkin_make # Compile workspacesource devel/setup.bash # Update environment variablesInstall dependent libraries
xxxxxxxxxxsudo apt-get install ros-melodic-libuvc-* ros-melodic-libuvc ros-melodic-mbf-msgs ros-melodic-bfl ros-melodic-serial freeglut3 freeglut3-dev libudev-dev libvorbis-dev
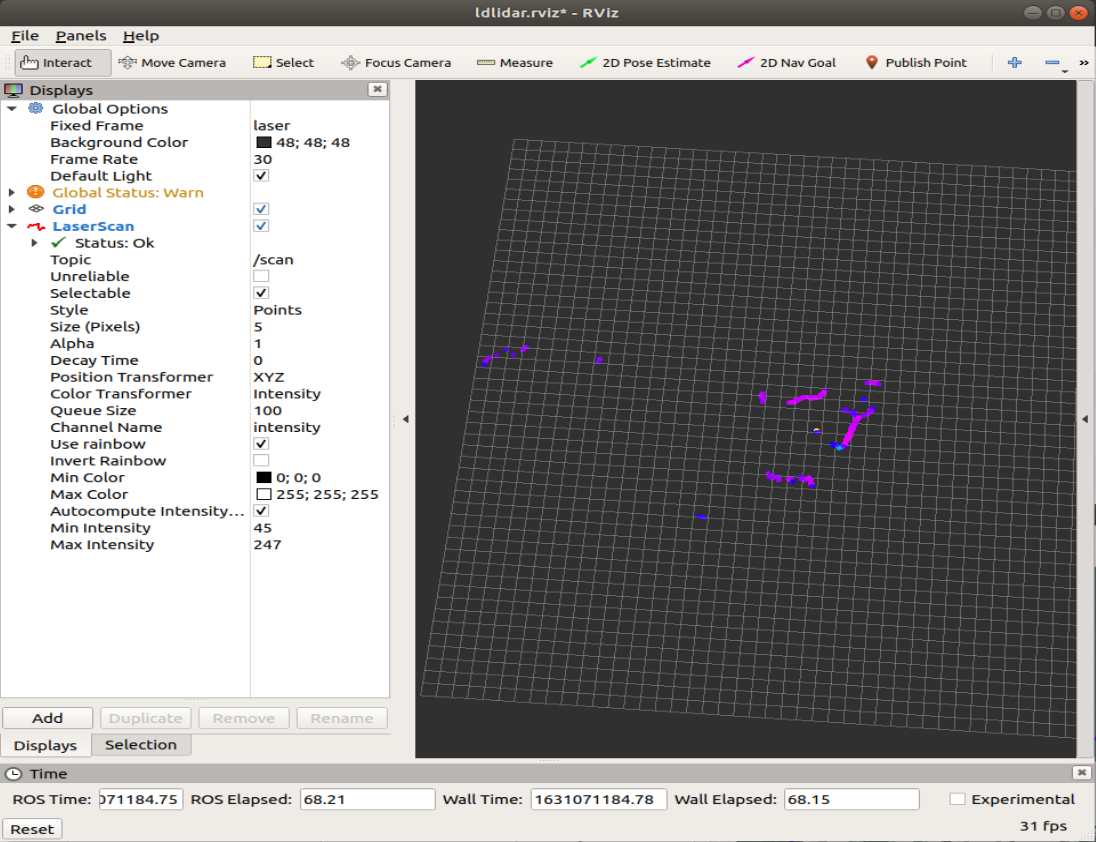
3、Lidar test method
xxxxxxxxxxroslaunch ldlidar_usb ld06.launch # Orrosrun ldlidar_usb ldlidar Start rviz
xxxxxxxxxxroslaunch ldlidar_usb rviz_ld06.launch
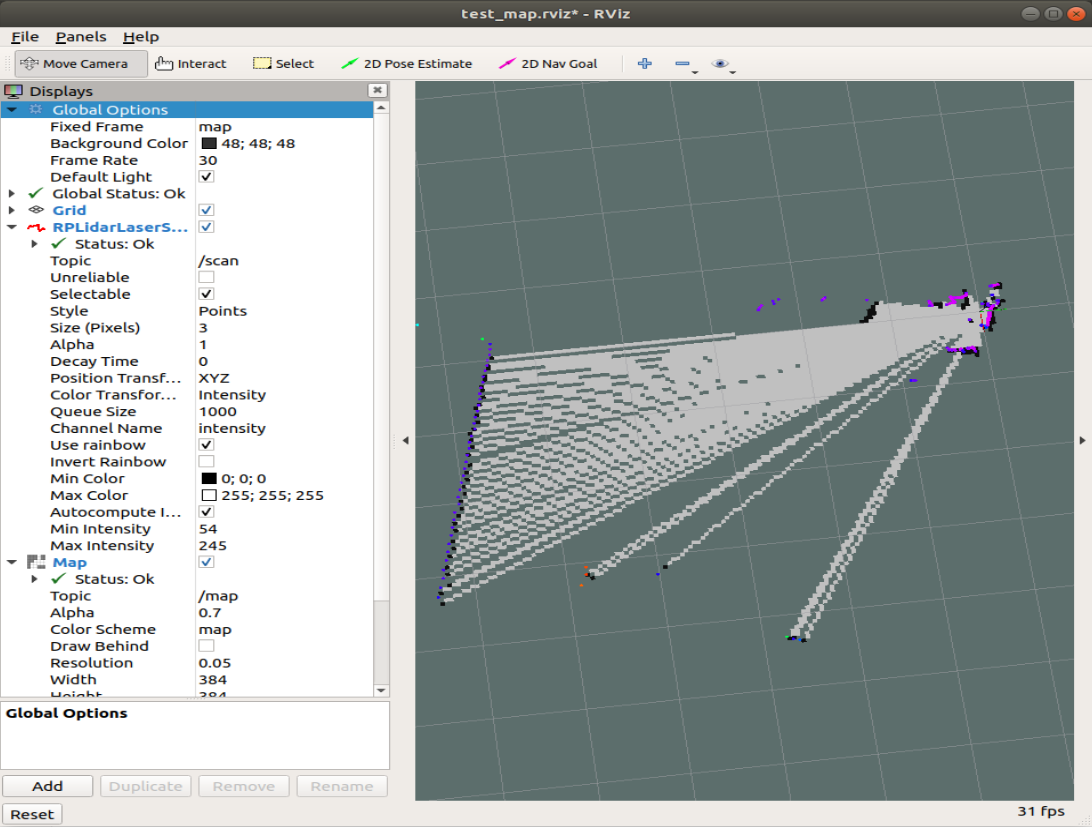
3、Mapping test method
Install the gmapping package
xxxxxxxxxxsudo apt install ros-melodic-gmapping
Start up
xxxxxxxxxxroslaunch ldlidar_usb test_gmapping.launch
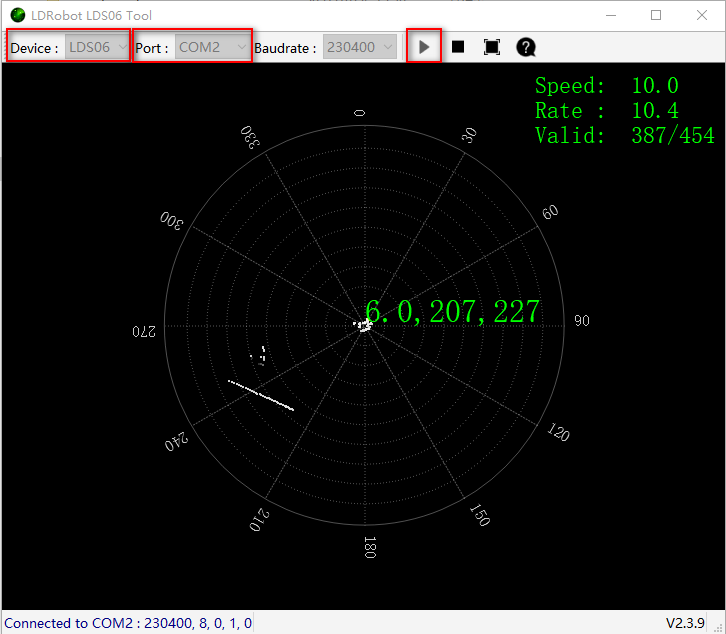
5、PC software test method
Extract the compressed package of the host computer to the local hard disk, select the appropriate system architecture (x64, x86), and double-click [ld_desktop.exe].
At this time, connect the LD06 lidar, select the corresponding radar model and port number in the host computer, and click the triangle start button.