4WD kinematic analysis
1. Llimitations
This course will analyze the kinematics equations of four-wheel drive vehicles from the aspect of four-wheel drive vehicle kinematics. Due to the structural errors of real vehicles, there will be resistance, friction and other factors in the movement process, which is more complex. For the sake of simplicity, the analysis is limited to the ideal state of four-wheel drive vehicles.
2. Establish kinematic model
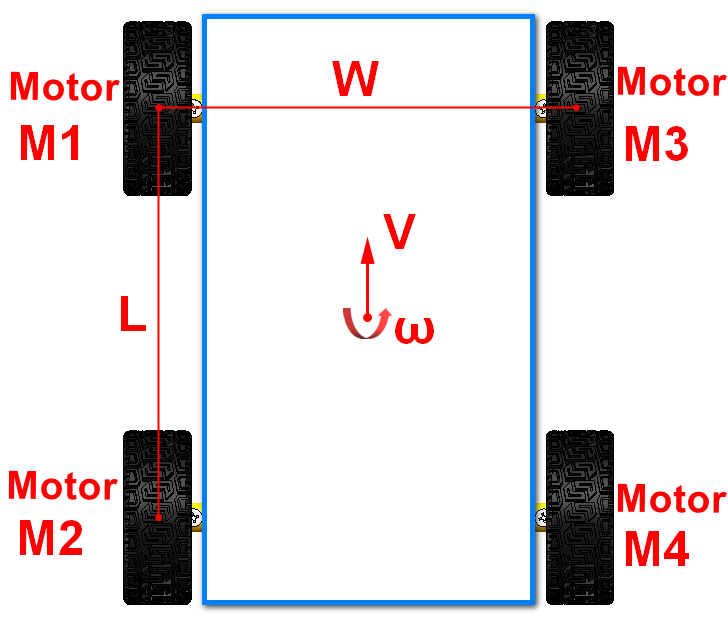
The four-wheel drive car is abstracted as the following model.
W represents the spacing between the left and right motor center points;
L represents the interval between the front and rear motor center points;
Motor M1, M2, M3 and M4 represent the four driving motors of the car;
V represents the linear speed of the trolley (forward and backward speed),
ω represents the car angular speed (rotation speed).
The linear velocity V and angular velocity are controlled ω. It is converted into four motors to control the movement of the 4WD car.
3. Kinematic analysis
Let V~m1~, V~m2~, V~m3~, V~m4~be the speed values of motors M1, M2, M3 and M4, that is, the rotational speed of wheels.
V~x~ is the car linear speed, V~x~ is positive for forward, V~x~ is negative for backward, V~z~ is the car angular speed, V~z~ is positive for left, V~z~ is negative for right.
A is half of the distance W between the left and right motor center points of the car(A=$ frac {W} {2} $,)
B is half of the distance L between the center points of the front and rear motors of the car (B=$ frac {L} {2} $)
When the car moves forward or backward
V~m1~=V~x~
V~m2~=V~x~
V~m3~=V~x~
V~m4~=V~x~
When the car rotates around the geometric center,
V~m1~=-V~z~*(A+B)
V~m2~=-V~z~*(A+B)
V~m3~=V~z~*(A+B)
V~m4~=V~z~*(A+B)
According to the above formula, we can get
V~m1~=V~x~-V~z~*(A+B)
V~m2~=V~x~-V~z~*(A+B)
V~m3~=V~x~+V~z~*(A+B)
V~m4~=V~x~+V~z~*(A+B)