4. Kinematic Analysis of Mecanum Wheel
4. Kinematic Analysis of Mecanum Wheel1. Installlation of Mecanum wheel on Omniduino Robot car2. Introduction of Mecanum wheel3. Mecanum Wheel Motion Analysis4. Motion analysis of the 4 Mecanum wheels:5. The installation position of the Mecanum wheel
1. Installlation of Mecanum wheel on Omniduino Robot car
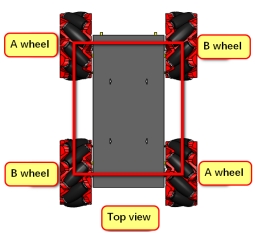
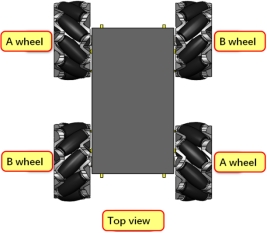
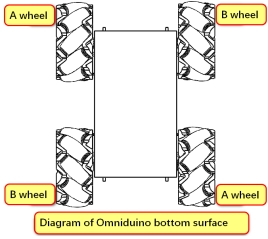
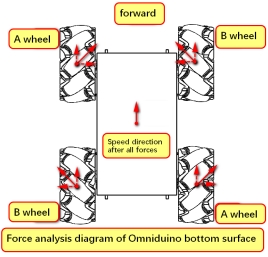
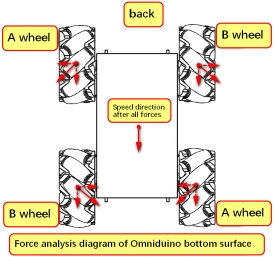
The only correct Mecanum wheel installation on the trolley should be [ABBA].
2. Introduction of Mecanum wheel
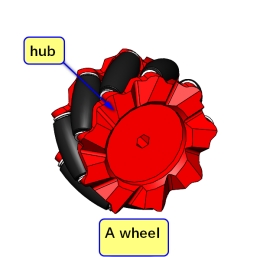
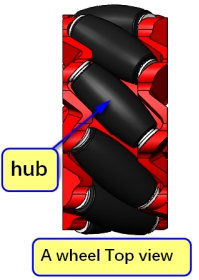
The Mecanum wheel is composed of a hub and a roller that surrounds the hub. The roller is a non-powered driven small roller. The angle between the Mecanum wheel roller axis and the hub axis is 45°. The Mecanum wheel contains two rounds of A and B that are mirror images of each other.


3. Mecanum Wheel Motion Analysis
Mecanum wheel is divided into two types. When the A wheel moves forward, it also moves to the right, that is, obliquely to the right front. When the A wheel moves backwards, it also moves to the left, that is, obliquely to the left and rear. Similarly, the B wheel can be moved obliquely to the left front and the right rear.
In all the courses, we take the front of the car as the positive direction, and the direction in which the wheel advances is the forward rotation of the motor, and the direction in which the wheel retreats is the motor reversal.
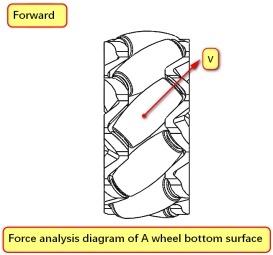
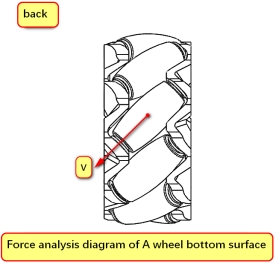
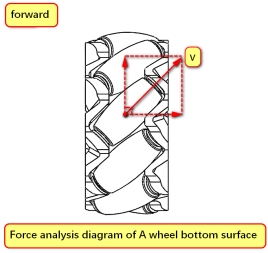
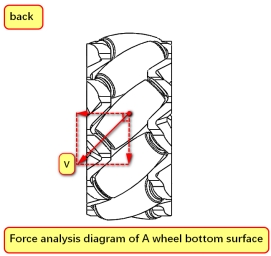
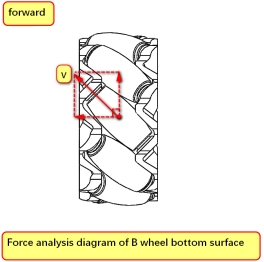
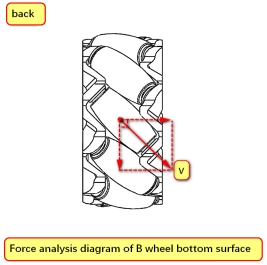
For the A wheel, the roller does not provide the forward force due to rolling in the moving direction, and the roller cannot roll in the direction of the roller axis and rubs against the ground to generate friction in the axial direction of the roller, that is, obliquely to the right front or left rear direction, thus A The speed direction of the wheel is obliquely right front or left rear.
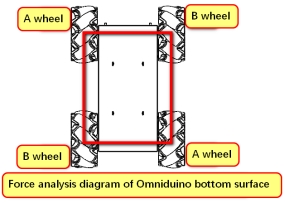
According to the physics knowledge, we can know that the direction of the car body movement depends on the speed direction of the four Mecanum wheels.
Then the A wheel can be decomposed into axially rightward and vertical axial forward velocity components, or axially leftward and vertical axially backwards.
About A wheel:
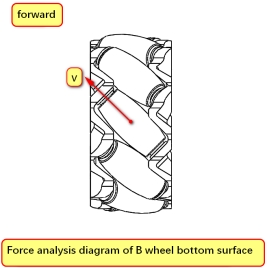
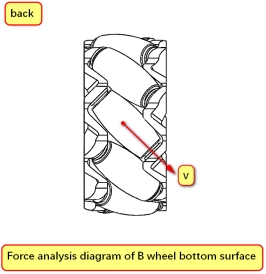
About B wheel:
4. Motion analysis of the 4 Mecanum wheels:
*Case 1--Forward/Back*
When all four wheels are turned forward, the A wheel and B wheel can cancel each other's axial speed, leaving only the forward speed, so that the car will advance. back are the same principle.
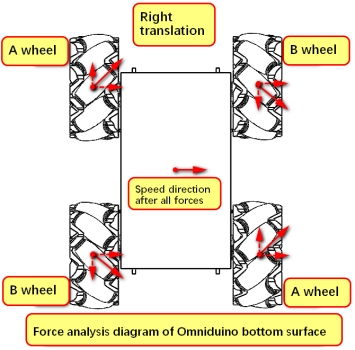
*Case 2--Right translation*
When the A wheel forward and the B wheel reverse, the forward and backward speeds will be offset, leaving only the speed to the right, then the car will translate to the right.
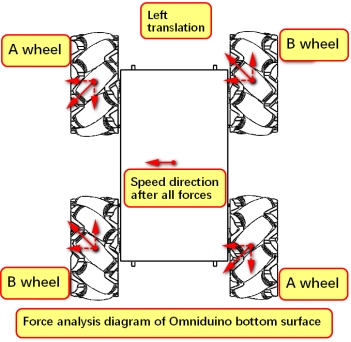
*Case 3--Left translation*
When the A wheel reverse and the B wheel is forward, the forward and backward speeds will be offset, leaving only the speed to the left, then the car will translate to the left.
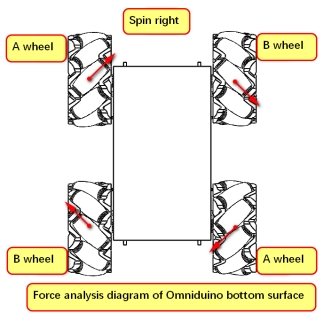
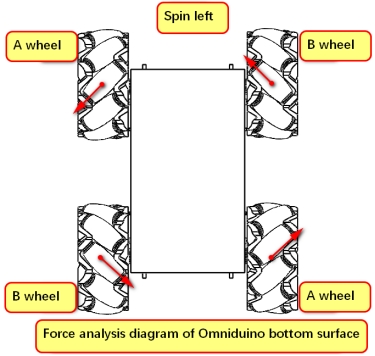
*Case 4--Spin Left/Spin right*
When left wheel of the chassis rotates forward and the right wheel reverse, so that car can be rotated to the right;
otherwise, the chassis will spin left.
When left wheel of the chassis rotates reverse and the right wheel reverse forward, so that car can be rotated to the left.
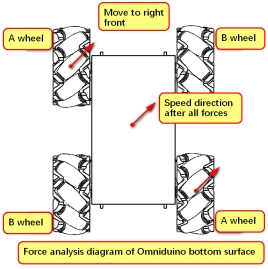
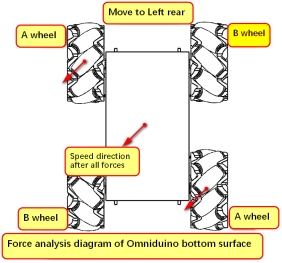
*Case 5--Move to Right front/Left rear*
When A wheel forward, B wheel stop, car will move to right front.
When B wheel reserve, B wheel stop, car will move to left rear.
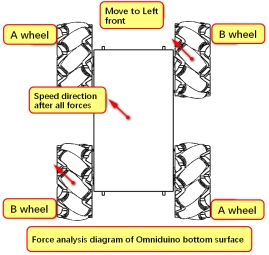
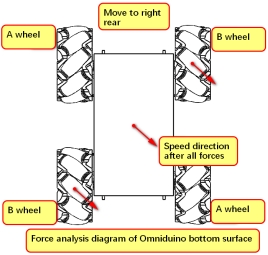
*Case 6--Move to Right front/Left rear*
When A wheel stop, B wheel forward, car will move to left front.
When B wheel stop, A wheel reserve, car will move to right rear.
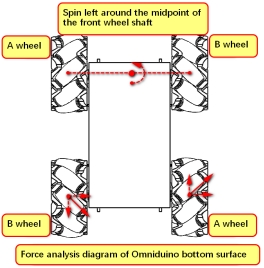
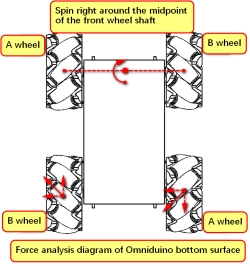
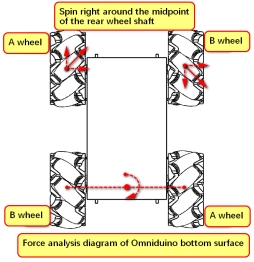
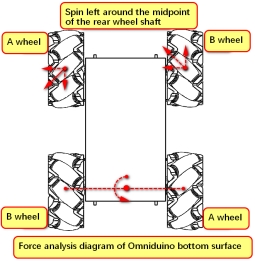
*Case 7--Rotation around the midpoint of the axis*
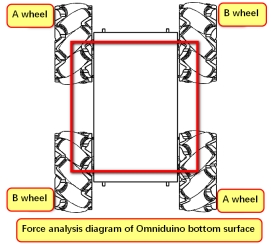
5. The installation position of the Mecanum wheel
In the previous section, we explained the installation combination of the wheat wheel. After the installation, the four wheels and the ground contact points are mainly square and rectangular.
Square:
Four wheels are located at the four vertices of the square, which can make translation and rotation can be done very well.
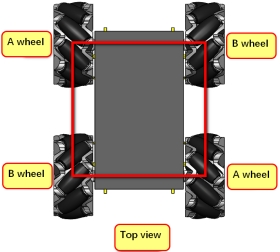
The chassis of the Omniduino is designed for the installation of the Mecanum wheel and is the ideal chassis for the McDonald.
Rectangle:
The rotation of the wheel can produce the Yaw axis rotation torque, and the torque arm of the rotation torque is also relatively long. It is the most common way to install.