5. Static IP and hotspot mode
This section uses jetson nano as an example.
5.1. Static IP
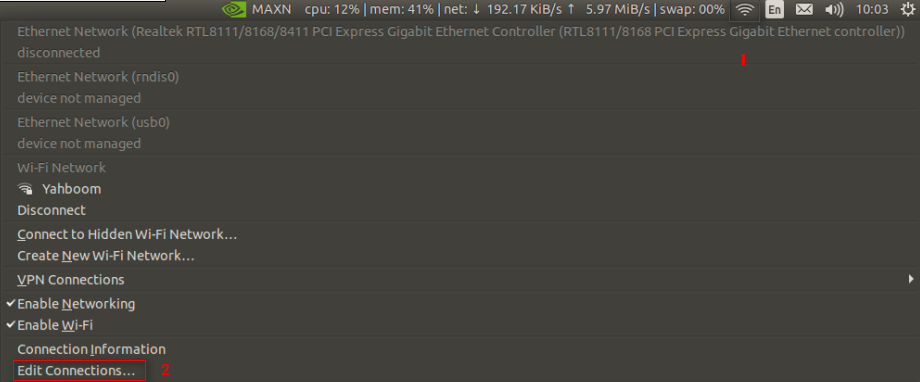
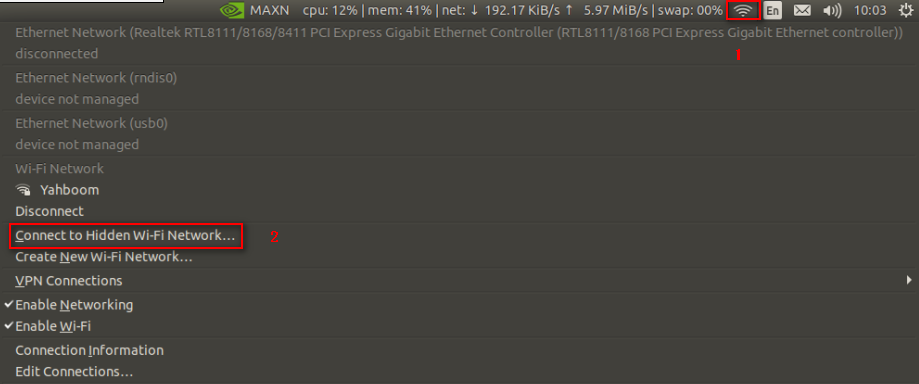
First, click the WiFi icon in the upper right corner and the following frame will appear, click [Edit Connections...] at the bottom.
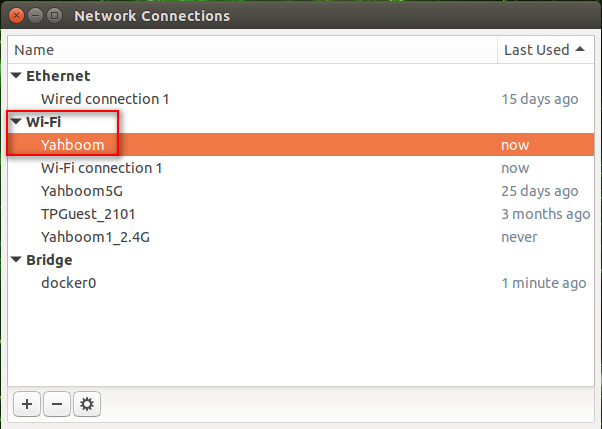
Double-click the connected Wi-Fi, here is [Yahboom].
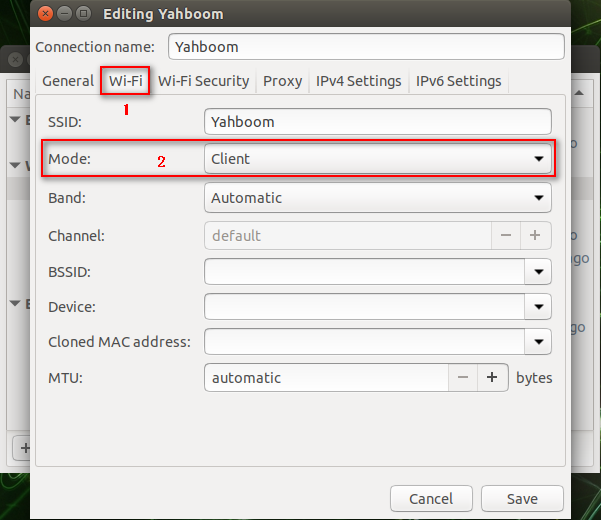
In the [Wi-Fi] directory, select [Client] for [Mode].
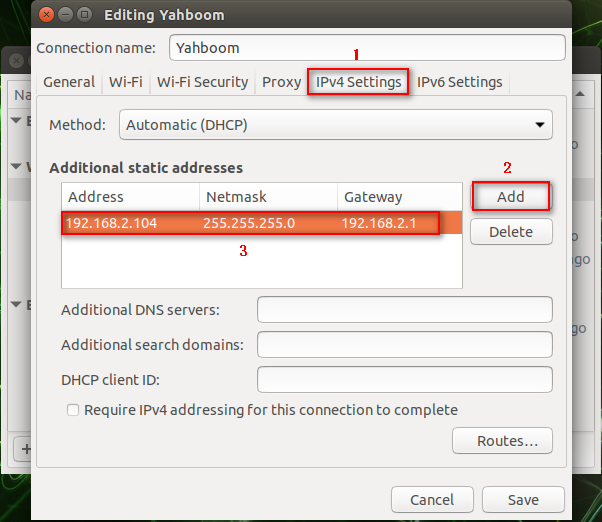
In the [IPv4 Settings] directory, click the [Add] icon, enter the IP as shown below, and finally click [save] to save.
Modify the .bashrc file and enter the command
sudo vim ~/.bashrc
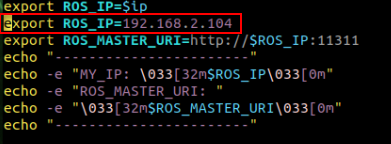
Set ROS_IP to the IP modified in the previous step, as shown in the following figure. Note; if you do not connect this Wi-Fi, be sure to comment out the modified line (just add # in front).
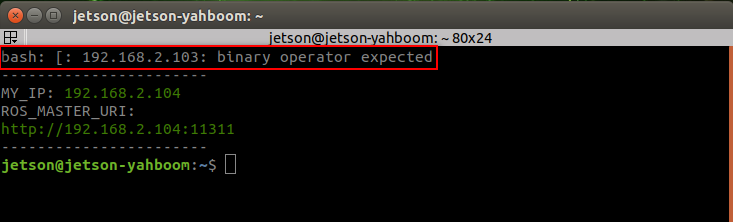
When we newly open the terminal, [binary operator expected] appears, don't bother, it does not affect the use.
5.2. Hotspot mode
First, click the WiFi icon in the upper right corner and the following frame will appear, click [Edit Connections...] at the bottom.
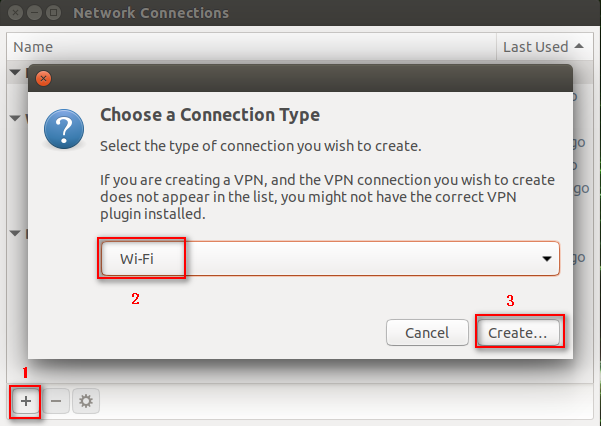
The frame as shown below will pop up, click [+] to select [Wi-Fi] mode, and click [Create...].
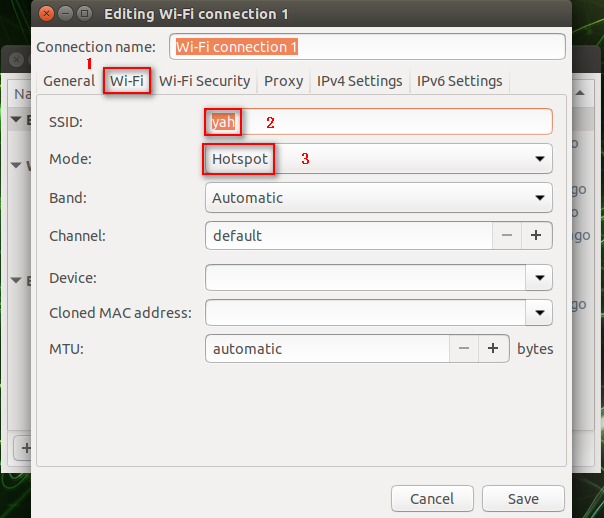
In the [Wi-Fi] directory, add [yah] in the [SSID] column, and select [Hotspot] in the [Mode] column.
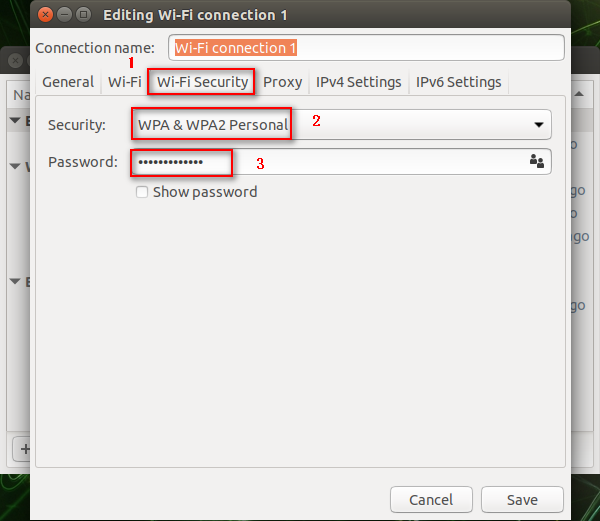
In the [Wi-Fi Security] directory, select [WPA & WPA2 Personal] in the [Security] column, and enter the password in the [Password] column.
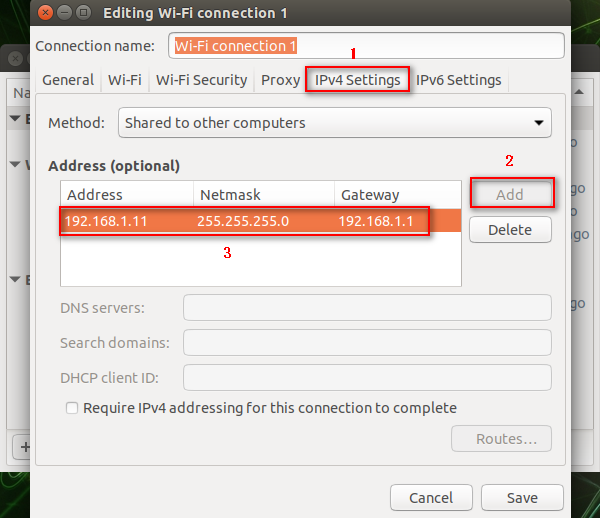
In the [IPv4 Settings] directory, click the [Add] icon, and enter the IP as shown below.
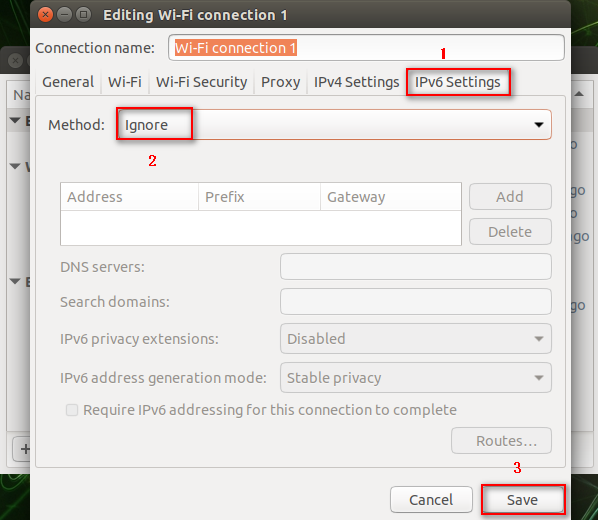
In the [IPv4 Settings] directory, select [Ignore] in the [Method] column, and finally click [Save] to save.
In the [Wi-Fi] mode, our newly created WIFI appears.
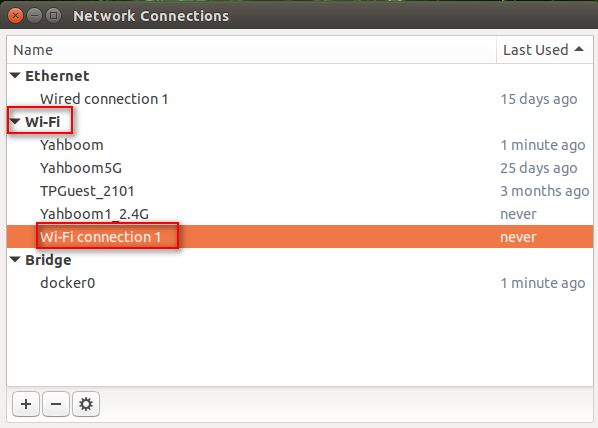
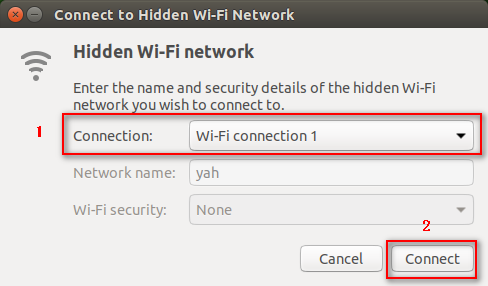
At this point, the new WIFI has been successfully created, and the next step is to connect the new WIFI. Follow the steps as shown below.
In the pop-up dialog box [Connections], select the newly created WIFI [Wi-Fi connections 1], and click [Connect].