7、rrt_exploration mapping algorithm
Note: This course takes Rosmaster-X3 as an example. Users need to modify according to their own motion model, which is different from the content of handheld laser radar mapping. This mapping adds odom data, so users need to have odom data in their own motion model. Function package path:~/oradar_ ws/src/yahboomcar_ nav
7.1、Start up
Input following command in terminal.
roslaunch yahboomcar_nav laser_bringup.launchroslaunch yahboomcar_nav rrt_exploration.launch use_rviz:=true
【use_rviz】parameter: Enable rviz visualization.
Start mapping
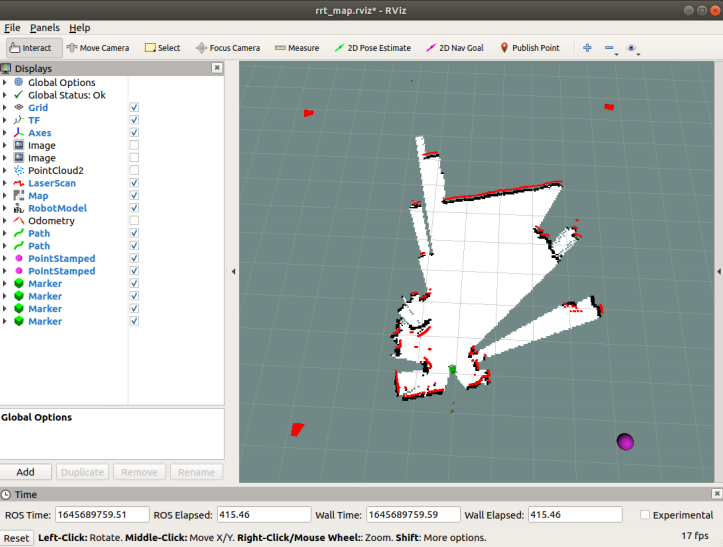
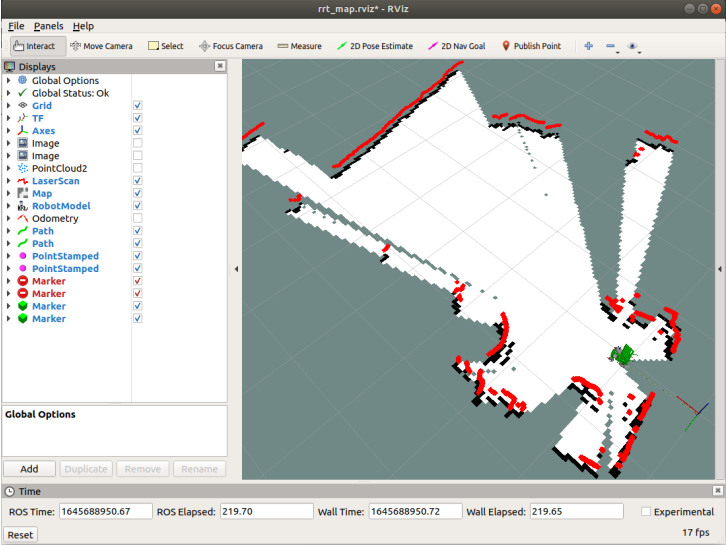
Click 【Publish Point】 on the 【rviz】 interface, and then click on the map. Each time you click a point on the map, you must first select 【Publish Point】.
Click four points according to * * clockwise or counterclockwise * *, and the last point is near the car. After selecting five points as required, the robot starts to explore and build the map.
Save mapping.
The map will be saved automatically after the map is created, and the zero point will be returned.
The map is saved to~/oradaar_ ws/src/yahboomcar_ Nav/maps
The name is rrt_ Map, which can be modified in the 【simple. launch】 file.
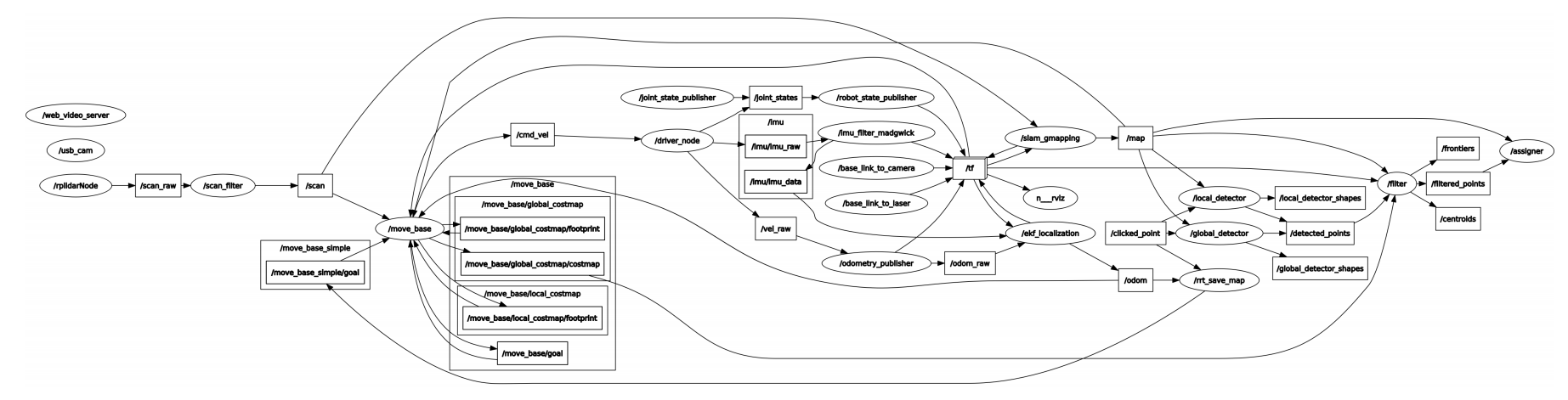
Check node.
xxxxxxxxxxrqt_graph
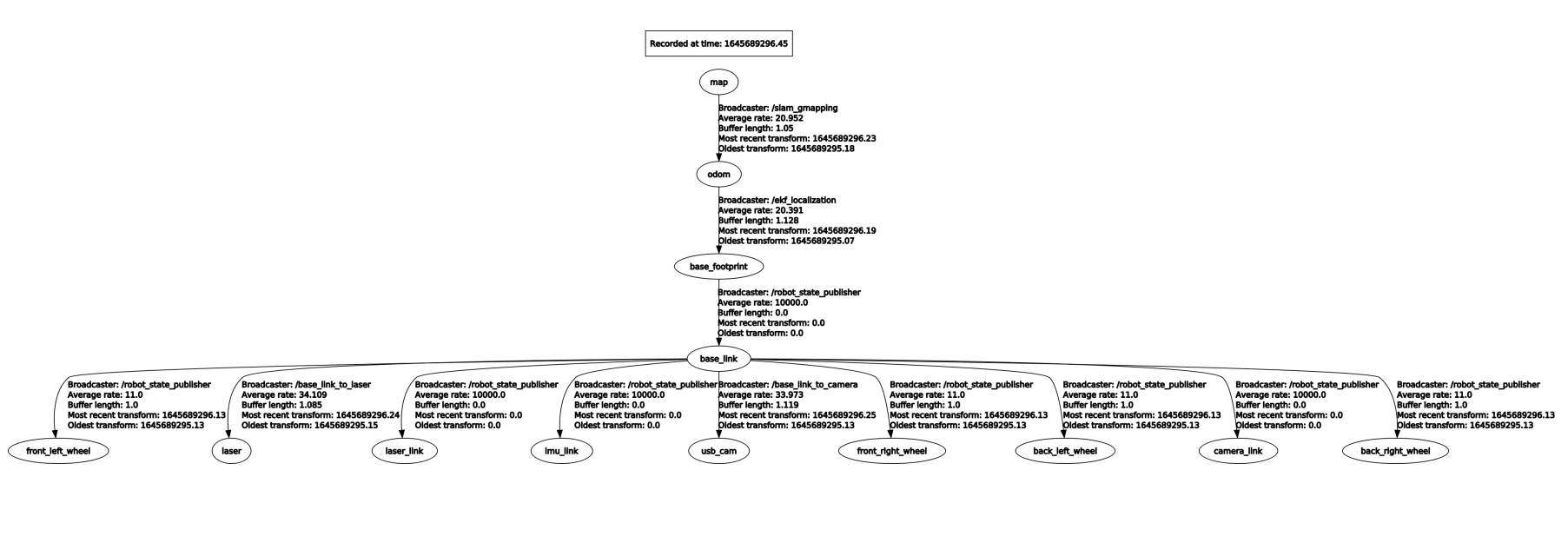
View TF tree
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree
7.2、简介
RRT exploration是基于RRT路径规划算法实现的搜索算法。之所以使用RRT算法是因为RRT对于未知区域有着强烈的倾向,在RRT exploration中,RRT主要用于生成边界点,这样对于探索边界点是很有好处的。所谓的边界点就是已经探索过的和未知的区域的交界点,在这里做一个定义:对于所有的区域,如果是探索过的,没有障碍物的区域记为0,有障碍物的记为1,未知的区域记为-1,开始时,整个区域都是记为-1的。
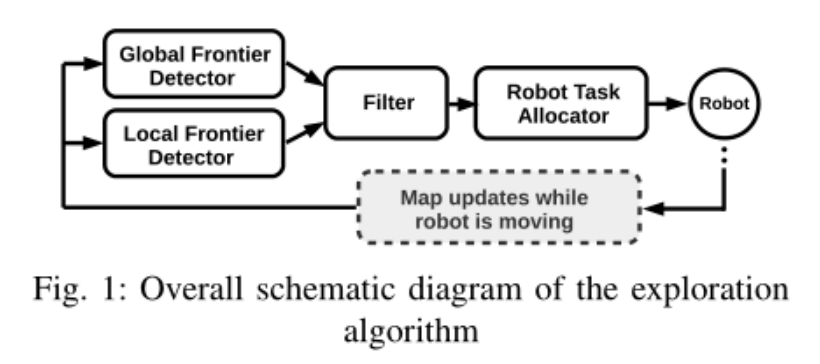
快速探索随机树 (RRT) 算法的框架如下:
- Global RRT frontier point detector node.
- Local RRT frontier point detector node.
- OpenCV-based frontier detector node.
- Filter node.
- Assigner node.
7.2.1、Global RRT frontier point detector node.
1)、Introduction
global_ rrt_ frontier_ The detector node uses the occupied grid and looks for boundary points (i.e. exploration targets) in it. It publishes the detected points so that the filter node can process them. In a multi-robot configuration, only one instance of the node is run. If necessary, running other instances of the global boundary detector can improve the speed of boundary point detection.
2)、Topics and services
| Subscribe to topics | type | describe |
|---|---|---|
| map | nav_msgs/OccupancyGrid | Topic names are defined by the ~map_Topic parameter. It is the name of the topic that the node receives. |
| clicked_point | geometry_msgs/PointStamped | The area to be probed by the global_rrt_frontier_detector node. This topic is where the node receives the five points that define the area. The first four points are the four points that define the square area to be explored, and the last point is the starting point of the tree. After these five points are announced, the RRT will begin to probe the border points. |
| Post a topic | type | describe |
| detected_points | geometry_msgs/PointStamped | Post the topic of detected boundary points. |
| shapes | visualization_msgs/Marker | Post RRT hypothetical linetypes to view with Rviz. |
3)、Parameter configuration
| parameter | type | Defaults | describe |
|---|---|---|---|
| ~map_topic | string | "/robot_1/map" | This node receives the map topic map name |
| ~ eta | float | 5.0 | This parameter controls the growth rate of the RRT used to detect boundary points, in meters. This parameter should be set according to the map size, a very large value will cause the tree to grow faster and thus detect border points faster, but a larger growth rate also means that the tree will lose small corner points in the map |
7.2.2、Local RRT frontier point detector node.
1)、Introduction
This node is similar to global_rrt_frontier_detector. However, it works differently because here the tree keeps getting reset every time a boundary point is detected. This node will run along the Global Boundary Detector node, which is responsible for quickly detecting boundary points located near the robot.
In a multi-robot configuration, each robot runs a local probe instance. So for a team of 3 robots, there will be 4 nodes for detecting boundary points; 3 local detectors and 1 global detector. If needed, running additional instances of the local boundary detector can increase the speed of boundary point detection. All detectors will publish detected boundary points("/detected_points") on the same topic.
2)、Topics and services
| Subscribe to topics | type | describe |
|---|---|---|
| map | nav_msgs/OccupancyGrid | The name of the map topic to which this node is subscribed. |
| clicked_point | geometry_msgs/PointStamped | Similar to global_rrt_frontier_detector node |
| Post a topic | type | describe |
| detected_points | geometry_msgs/PointStamped | Post the topic of detected boundary points. |
| shapes | visualization_msgs/Marker | Post RRT hypothetical linetypes to view with Rviz. |
3)、Configuration parameters
| parameter | type | Defaults | describe |
|---|---|---|---|
| ~/robot_1/base_link | string | "/robot_1/base_link" | Connect to the frame of the robot. Every time the RRT tree is reset, it will start from the current robot position obtained in this coordinate system. |
| ~map_topic | string | "/robot_1/map" | This node receives the map topic map name |
| ~ eta | float | 5.0 | This parameter controls the growth rate of the RRT used to detect boundary points, in meters. This parameter should be set according to the map size, a very large value will cause the tree to grow faster and thus detect border points faster, but a larger growth rate also means that the tree will lose small corner points in the map |
7.2.3、OpenCV-based frontier detector node.
1)、Introduction
This node is another edge detector, but it is not based on RRT. This node uses OpenCV tools to detect boundary points. It is designed to run alone, in a multi-bot configuration, only one instance should be running(running other instances of this node will not make any difference).
Originally, this node was implemented for comparison with RRT-based boundary detectors. Running this node along the RRT detectors(local and global) can increase the speed of boundary point detection.
Note: You can run any type and number of detectors, all of which will be published on the same topic that the filter node(explained in the next section) subscribes to. The filter, on the other hand, passes the filtered boundary points to the assignor in order to command the robot to explore these points.
2)、Topics and Services
| Subscribe to topics | type | describe |
|---|---|---|
| map | nav_msgs/OccupancyGrid | The name of the map topic to which this node is subscribed. |
| Post a topic | type | describe |
| detected_points | geometry_msgs/PointStamped | Post the topic of detected boundary points. |
| shapes | visualization_msgs/Marker | Post RRT hypothetical linetypes to view with Rviz. |
3)、Configuration parameters
| parameter | type | Defaults | describe |
|---|---|---|---|
| ~map_topic | string | "/robot_1/map" | This node receives the map topic map name |
7.2.4、Filter node.
1)、Introduction
This node node receives detected boundary points from all detectors, filters these points, and passes them to the assign node to command the robot. Filtering includes removing old and invalid points, as well as removing redundant points.
2)、Topics and Services
| Subscribe to topics | type | describe |
|---|---|---|
| map | nav_msgs/OccupancyGrid | Topic names are defined by the ~map_Topic parameter. It is the name of the topic that the node receives. |
| robot_x/move_base_node /global_costmap/costmap | nav_msgs/OccupancyGrid | x is the number of the robot. This node subscribes to the topic of all costmaps for all robots, so costmaps are required. Normally, costmaps should be published by navigation(there will be one costmap per robot when navigation is turned on on a robot). For example, if n_robots=2, the nodes will subscribe to: robot_1/move_base_node/global_costmap/costmap and robot_2/move_base_node/global_costmap/costmap. The costmap is used to remove invalid points. Note: The namespace of all nodes corresponding to robots should start with robot_x. |
| detected_points | geometry_msgs/PointStamped | The topic name defined by ~goals_topic. It is the topic on which the filter node receives boundary detection points. |
| Post a topic | type | describe |
| frontiers | visualization_msgs/Marker | The filter node only publishes topics of filtered boundary points. |
| centroids | visualization_msgs/Marker | The filter node publishes the topic of the received boundary points. |
| filtered_points | MsgLink(msg/type) | All filtered points are sent to the assigner node of this topic as an array of points. |
3)、Configuration parameters
| parameter | type | Defaults | describe |
|---|---|---|---|
| ~map_topic | string | "/robot_1/map" | This node receives the map topic map name |
| ~costmap_clearing_threshold | float | 70.0 | Costmap cleanup threshold |
| ~info_radius | float | 1.0 | The information radius used to calculate the information gain of the boundary point. |
| ~goals_topic | string | /detected_points | Defines the topic the node receives to detect boundary points |
| ~n_robots | float | 1.0 | Number of robots |
| ~namespace | string | Namespaces | |
| ~namespace_init_count | float | 1.0 | index of namespace |
| ~rate | float | 100.0 | Node cycle rate(in Hz). |
7.2.5、Assigner node.
1)、Introduction
This node receives target detection targets, i.e. filtered boundary points issued by the filtering node, and commands the robot accordingly. The evaluator node commands the robot via move_base_node. That's why navigation is initiated on the robot.
2)、Topics and Services
| Subscribe to topics | type | describe |
|---|---|---|
| map | nav_msgs/OccupancyGrid | Topic names are defined by the ~map_Topic parameter. It is the name of the topic that the node receives. |
| frontiers_topic | nav_msgs/OccupancyGrid | The topic name is defined by the ~frontiers_topic parameter |
3)、Configuration parameters
| parameter | type | Defaults | describe |
|---|---|---|---|
| ~map_topic | string | "/robot_1/map" | This node receives the map topic map name |
| ~info_radius | float | 1.0 | The information radius used to calculate the information gain of the boundary point. |
| ~info_multiplier | float | 3.0 | The unit is meters. This parameter is used to emphasize the importance of the information gain of the boundary point relative to the cost (expected travel distance to the boundary point). |
| ~hysteresis_radius | float | 3.0 | The unit is meters. This parameter defines the lag radius. |
| ~hysteresis_gain | float | 2.0 | The unit is meters. This parameter defines the hysteresis gain. |
| ~frontiers_topic | string | /filtered_points | This node receives topics for boundary points. |
| ~n_robots | float | 1.0 | Number of robots |
| ~namespace | string | Namespaces | |
| ~namespace_init_count | float | 1.0 | Starting indexing of bot names. |
| ~delay_after_assignement | float | 0.5 | The unit is seconds. It defines the amount of delay after each robot assignment. |
| ~global_frame | string | "/map" | for the global coordinate system. In a single bot, it is the same as the "map_topic" parameter. In the case of multiple robots, the coordinate system name corresponds to the global coordinate system name. |