RaspberryPi
1. Preparation
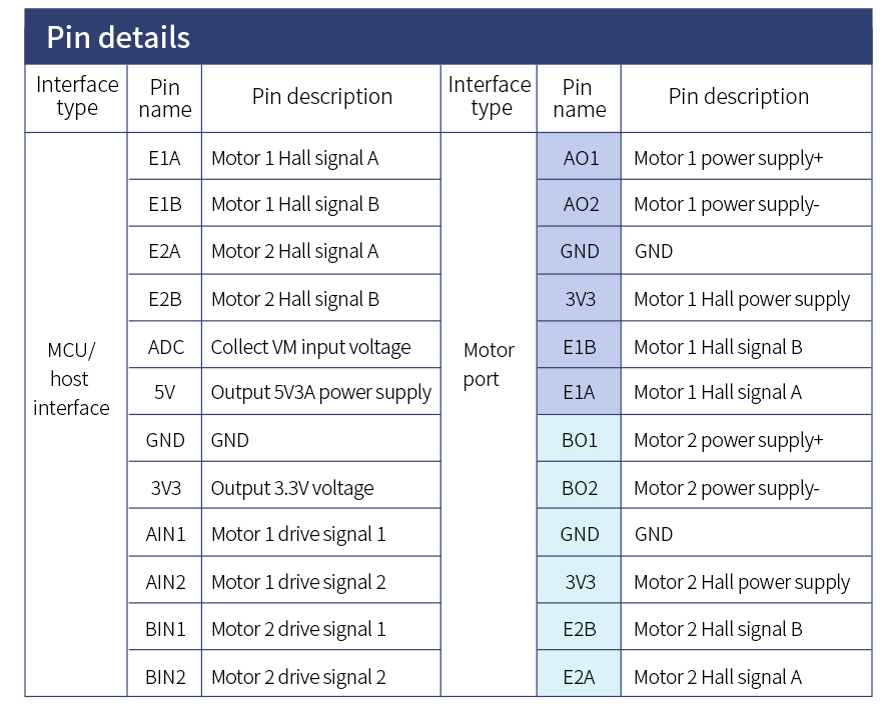
Connect the motor drive board and Raspberry Pi according to the wiring diagram, connect the battery to the power input interface on motor drive module.
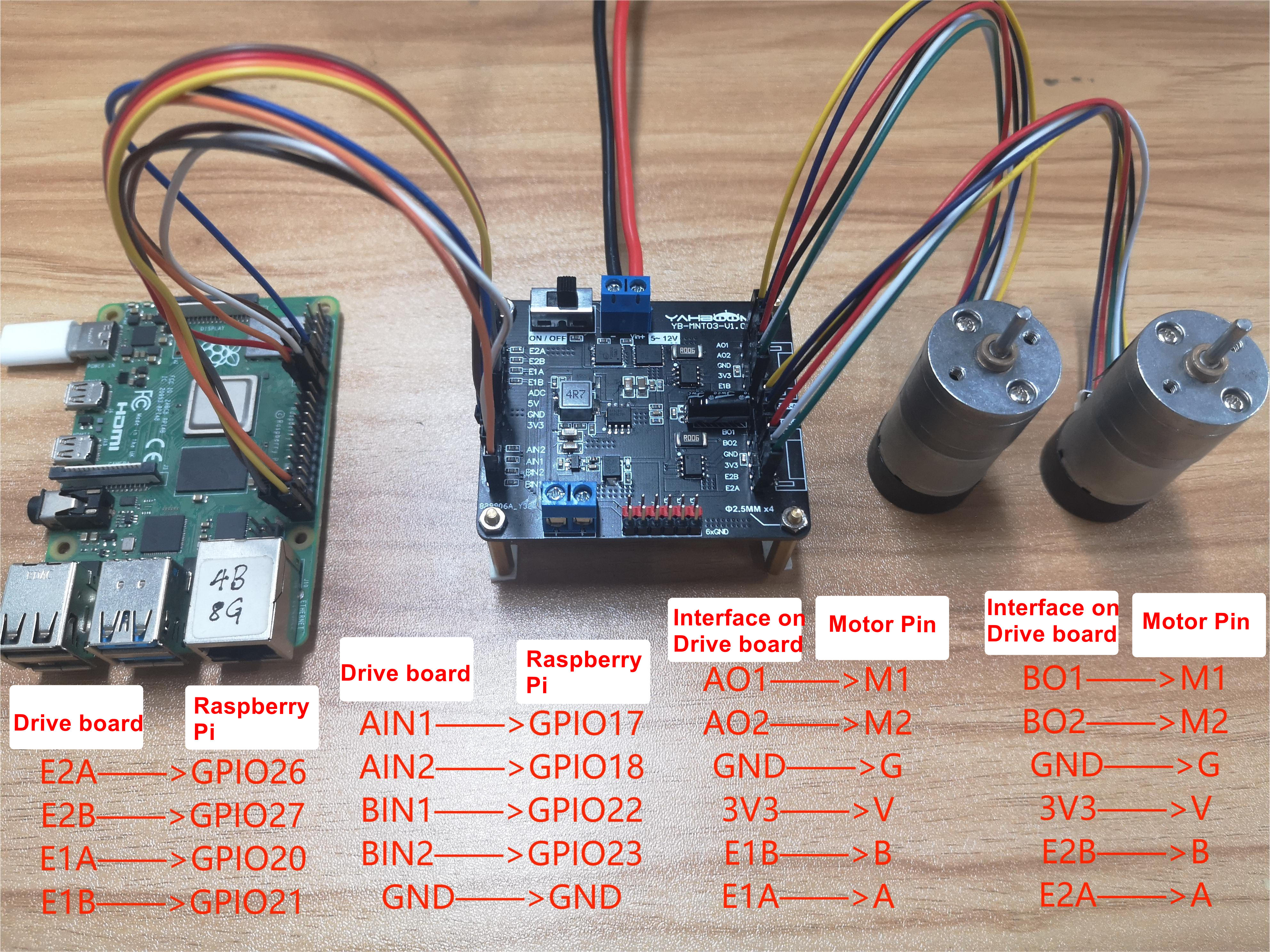
Note: The motor interface wire sequence of the dual motor drive board should correspond to the motor pin! Otherwise, the motor drive plate will be damaged.
Note: The motor interface wire sequence of the dual motor drive board.
2. Code
ximport RPi.GPIO as GPIO #Import Libraryimport time
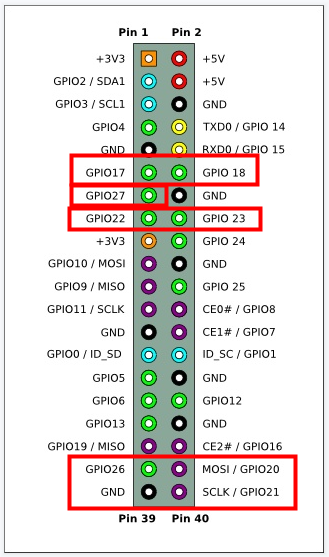
GPIO.setmode(GPIO.BCM) #Set pinAIN1 = 17AIN2 = 18BIN1 = 22BIN2 = 23
GPIO.setwarnings(False) #Remove warningGPIO.setup(AIN1, GPIO.OUT) #Pin set to outputp1 = GPIO.PWM(AIN1, 50) #50 is the frequency of 50 Hzp1.start(0)
GPIO.setup(AIN2, GPIO.OUT)p2 = GPIO.PWM(AIN2, 50)p2.start(0)
GPIO.setup(BIN1, GPIO.OUT)p3 = GPIO.PWM(BIN1, 50)p3.start(0)
GPIO.setup(BIN2, GPIO.OUT)p4 = GPIO.PWM(BIN2, 50)p4.start(0)
# The rotation speed of the motor can be changed by changing the value in the brackets. The value range is 0~100def forward(time_sleep): #Forward for a few seconds p1.start(0) p2.start(50) p3.start(0) p4.start(50) time.sleep(time_sleep) def stop(): #Stop it p1.start(0) p2.start(0) p3.start(0) p4.start(0)
spin_count = 0spin_count2 = 0E1A = 20 #Set pinE1B = 21E2A=26E2B=27GPIO.setmode(GPIO.BCM)GPIO.setup(E1B, GPIO.IN, pull_up_down=GPIO.PUD_UP)GPIO.setup(E1A, GPIO.IN, pull_up_down=GPIO.PUD_UP)GPIO.setup(E2B, GPIO.IN, pull_up_down=GPIO.PUD_UP)GPIO.setup(E2A, GPIO.IN, pull_up_down=GPIO.PUD_UP)
def my_callback(channel): #Callback function global spin_count if GPIO.input(E1A): if not GPIO.input(E1B): spin_count += 1 elif GPIO.input(E1B): spin_count -= 1 print(spin_count) def my_callback2(channel): global spin_count2 if GPIO.input(E2A): if not GPIO.input(E2B): spin_count2 += 1 elif GPIO.input(E2B): spin_count2 -= 1 print(spin_count2)
GPIO.add_event_detect(E1A, GPIO.RISING, callback=my_callback)GPIO.add_event_detect(E2A, GPIO.RISING, callback=my_callback2)
forward(5) #Forward rotation for 5sstop() #Stop it
3. Experimental result
Run the program, the motor drive board drives the two-way motor to rotate for 5s, and the terminal prints the speed of the motor.