2、Opencv application
2、Opencv application2.1、Overview2.2、QR code2.2.1、Introduction to QR Code2.2.2、Structure of QR code2.2.3、Features of QR codes2.2.4、QR code creation and recognition2.3、Human body pose estimation2.3.1、Overview2.3.2、Principle2.3.3、Start up2.4、Target Detection2.4.1、Model structure2.4.2、About code2.4.3、Start up
2.1、Overview
OpenCV is a cross-platform computer vision and machine learning software library based on the BSD license (open source) that can run on Linux, Windows, Android and MacOS operating systems.
2.2、QR code
2.2.1、Introduction to QR Code
QR code is a type of two-dimensional barcode. It not only has large information capacity, high reliability, and low cost, but it can also express a variety of text information such as Chinese characters and images. It has strong confidentiality and anti-counterfeiting and is very convenient to use.
2.2.2、Structure of QR code
| Pciture | Parsing |
|---|---|
 | Positioning markings: Indicate the direction of the QR code. |
 | Alignment markings: If the QR code is large, these additional elements help positioning. |
 | Timing pattern: Through these lines, the scanner can identify the size of the matrix |
 | Version information: The version number of the QR code being used. There are currently 40 different version numbers of the QR code. |
 | Format information: The format mode contains information about fault tolerance and data mask mode, and makes it easier to scan the code. |
 | Data and error correction keys: These modes save actual data. |
 | Quiet zone: This area is very important to the scanner, and its role is to separate itself from the surroundings. |
2.2.3、Features of QR codes
The data value in the QR code contains repeated information (redundant value).
2.2.4、QR code creation and recognition
Code path:~/astra_ws/src/astra_visual/qrcode
Install
python3 -m pip install qrcode pyzbarsudo apt-get install libzbar-dev
- Created
Create a qrcode object
xxxxxxxxxx ''' Parameter meaning: version: An integer ranging from 1 to 40, which controls the size of the QR code (the minimum value is 1, which is a 12×12 matrix). If you want the program to determine it automatically, set the value to None and use the fit parameter. error_correction: Control the error correction function of the QR code. The following 4 constants can be used. ERROR_CORRECT_L: About 7% or less of errors can be corrected. ERROR_CORRECT_M (default): About 15% or less of errors can be corrected. ROR_CORRECT_H: About 30% or less errors can be corrected. box_size: Control the number of pixels contained in each small grid in the QR code. border: Control the number of grids contained in the border (the distance between the QR code and the picture border) (the default is 4, which is the minimum value specified by the relevant standards) ''' qr = qrcode.QRCode( version=1, error_correction=qrcode.constants.ERROR_CORRECT_H, box_size=5, border=4,)qrcode QR code to add logo
xxxxxxxxxx # If the logo address exists, add the logo image my_file = Path(logo_path) if my_file.is_file(): img = add_logo(img, logo_path)Note: When using Chinese, Chinese characters need to be added
xxxxxxxxxxpython3 + py file to execute, then enter the content to be generated, and press Enter to confirm.

- Identify
xxxxxxxxxxdef decodeDisplay(image, font_path): gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY) # You need to convert the output Chinese characters into Unicode encoding first barcodes = pyzbar.decode(gray) for barcode in barcodes: # Extract the position of the bounding box of the QR code (x, y, w, h) = barcode.rect # Draw the bounding box of the barcode in the image cv.rectangle(image, (x, y), (x + w, y + h), (225, 0, 0), 5) encoding = 'UTF-8' # To draw it, you need to convert it to a string first barcodeData = barcode.data.decode(encoding) barcodeType = barcode.type #Plot the data and type on the image pilimg = Image.fromarray(image) #Create a brush draw = ImageDraw.Draw(pilimg) # Parameter 1: font file path, parameter 2: font size fontStyle = ImageFont.truetype(font_path, size=12, encoding=encoding) # Parameter 1: print coordinates, parameter 2: text, parameter 3: font color, parameter 4: font draw.text((x, y - 25), str(barcode.data, encoding), fill=(255, 0, 0), font=fontStyle) # Convert PIL image to cv2 image image = cv.cvtColor(np.array(pilimg), cv.COLOR_RGB2BGR) # Print barcode data and barcode type to the terminal print("[INFO] Found {} barcode: {}".format(barcodeType, barcodeData)) return image- Effect demonstration
Note: Because video0-7 of RDK-X3 is occupied, and the newly connected camera is device video8, so we need to modify the camera port number called in the QRcode_Parsing.py code.
After modification
xfont_path = "../font/Block_Simplified.TTF"capture = cv.VideoCapture(8)

After modification
xpython3 + py file to execute

2.3、Human body pose estimation
Path code:~/astra_ws/src/astra_visual/detection
2.3.1、Overview
Human Posture Estimation, as shown in the figure below.

2.3.2、Principle

Input an image, extract the features through the convolutional network to obtain a set of feature maps, and then use the CNN network to extract Part Confidence Maps and Part Affinity Fields respectively;
2.3.3、Start up
xxxxxxxxxxcd ~/astra_ws/src/astra_visual/detectionpython3 target_detection.py
After clicking the image frame, use the keyboard【f】key to switch target detection.
xxxxxxxxxxif action == ord('f'):state = not state # Switch functionInput picture

Output picture

2.4、Target Detection
The main problem to be solved in this section is how to use the dnn module in OpenCV to import a trained target detection network.
We use OpenCV3.2.0 on our Transbot system.
At present, there are three main methods for using deep learning to detect objects:
- Faster R-CNNs
- You Only Look Once(YOLO)
- Single Shot Detectors(SSDs)
2.4.1、Model structure
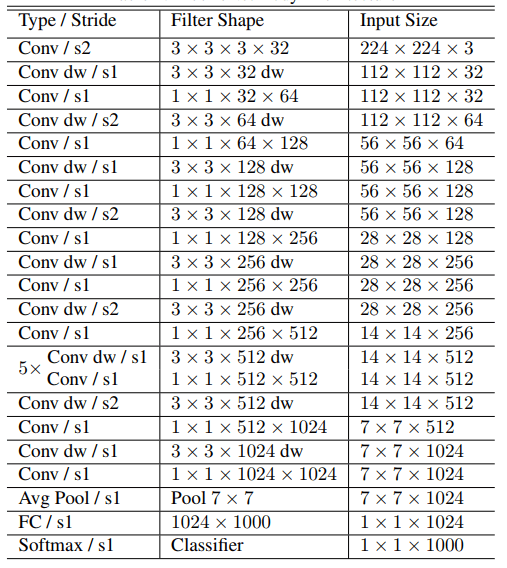
The main work of MobileNet is to replace the past standard convolutions with depthwise sparable convolutions to improve the computational efficiency and parameter amount of convolutional networks. The basic structure of depthwise separable convolution is shown in the figure below:

The MobileNets network is composed of many depthwise separable convolutions shown in the figure above. The specific network structure is shown in the figure below:
2.4.2、About code
List of recognizable objects
xxxxxxxxxx[person, bicycle, car, motorcycle, airplane, bus, train, truck, boat, traffic light, fire hydrant, street sign, stop sign, parking meter, bench, bird, cat, dog, horse, sheep, cow, elephant, bear, zebra, giraffe, hat, backpack, umbrella, shoe, eye glasses, handbag, tie, suitcase, frisbee, skis, snowboard, sports ball, kite, baseball bat, baseball glove, skateboard, surfboard, tennis racket, bottle, plate, wine glass, cup, fork, knife, spoon, bowl, banana, apple, sandwich, orange, broccoli, carrot, hot dog, pizza, donut, cake, chair, couch, potted plant, bed, mirror, dining table, window, desk, toilet, door, tv, laptop, mouse, remote, keyboard, cell phone, microwave, oven, toaster, sink, refrigerator, blender, book, clock, vase, scissors, teddy bear, hair drier, toothbrush]Load category [object_detection_coco.txt], import model [frozen_inference_graph.pb], specify deep learning framework [TensorFlow]
xxxxxxxxxx# Load COCO class namewith open('object_detection_coco.txt', 'r') as f: class_names = f.read().split('\n')# Display different colors for different targetsCOLORS = np.random.uniform(0, 255, size=(len(class_names), 3))# Load DNN image modelmodel = cv.dnn.readNet(model='frozen_inference_graph.pb', config='ssd_mobilenet_v2_coco.txt', framework='TensorFlow')Import the picture, extract the height and width, calculate the 300x300 pixel blob, and pass this blob to the neural network
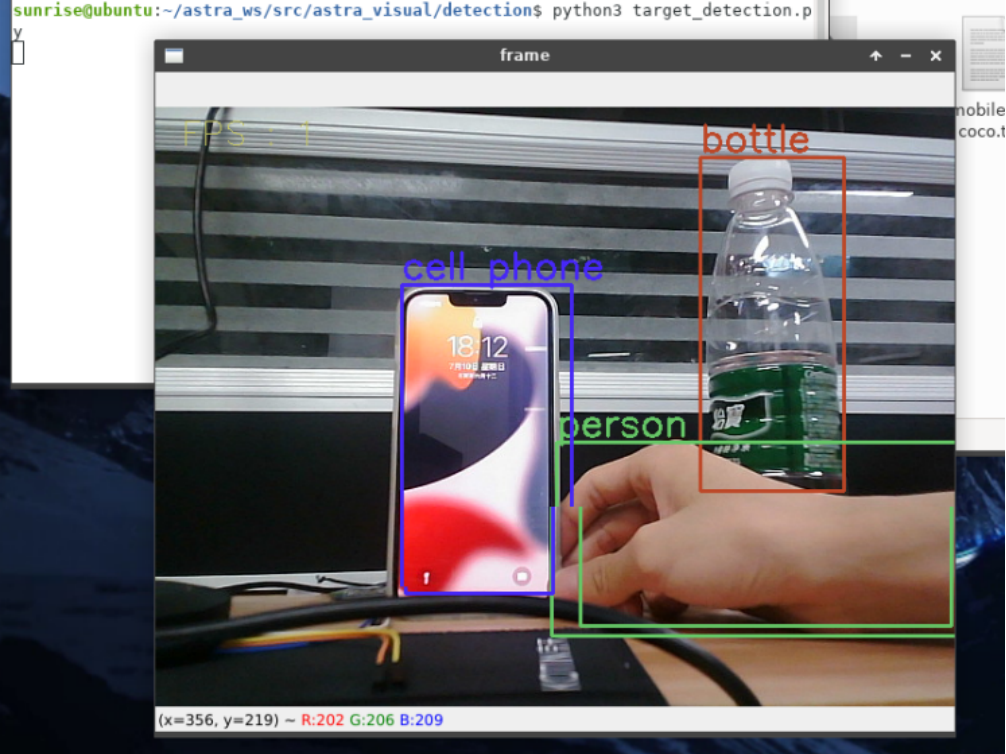
xxxxxxxxxxdef Target_Detection(image): image_height, image_width, _ = image.shape # Create blob from image blob = cv.dnn.blobFromImage(image=image, size=(300, 300), mean=(104, 117, 123), swapRB=True) model.setInput(blob) output = model.forward() # Iterate through each test for detection in output[0, 0, :, :]: # Confidence of extraction detection confidence = detection[2] # Only when the detection confidence is higher than a certain threshold, draw the bounding box, otherwise skip if confidence > .4: # Get the ID of the class class_id = detection[1] # Map the id of the class to the class class_name = class_names[int(class_id) - 1] color = COLORS[int(class_id)] # Get bounding box coordinates box_x = detection[3] * image_width box_y = detection[4] * image_height # Get the width and height of the bounding box box_width = detection[5] * image_width box_height = detection[6] * image_height # Draw a rectangle around each detected object cv.rectangle(image, (int(box_x), int(box_y)), (int(box_width), int(box_height)), color, thickness=2) # Write the text of the class name on the detected object cv.putText(image, class_name, (int(box_x), int(box_y - 5)), cv.FONT_HERSHEY_SIMPLEX, 1, color, 2) return image2.4.3、Start up
xxxxxxxxxxcd ~/astra_ws/src/astra_visual/detectionpython3 target_detection.py
After clicking the image frame, use the keyboard【f】key to switch the human pose estimation.
xxxxxxxxxxif action == ord('f'):state = not state # Switch function