5. MoveIt Cartesian Path
This lesson takes the MoveIT simulation as an example. If you need to set the synchronization between the real machine and the simulation, please refer to the lesson [02, MoveIt Precautions and Controlling the Real Machine]. ! ! ! be careful! ! !
The effect demonstration is a virtual machine, and other masters are running (related to the performance of the master, depending on the actual situation).
5.1. Introduction
The Cartesian coordinate system is the collective name for the Cartesian coordinate system and the oblique coordinate system. A Cartesian path is actually a line connecting any two points in space
5.2. Start
Start the MoveIT
roslaunch transbot_se_moveit_config demo.launch Start the Cartesian path node
xxxxxxxxxxrosrun transbot_se_moveit_config 04_cartesian # C++rosrun transbot_se_moveit_config 04_cartesian.py # python- C++ code example
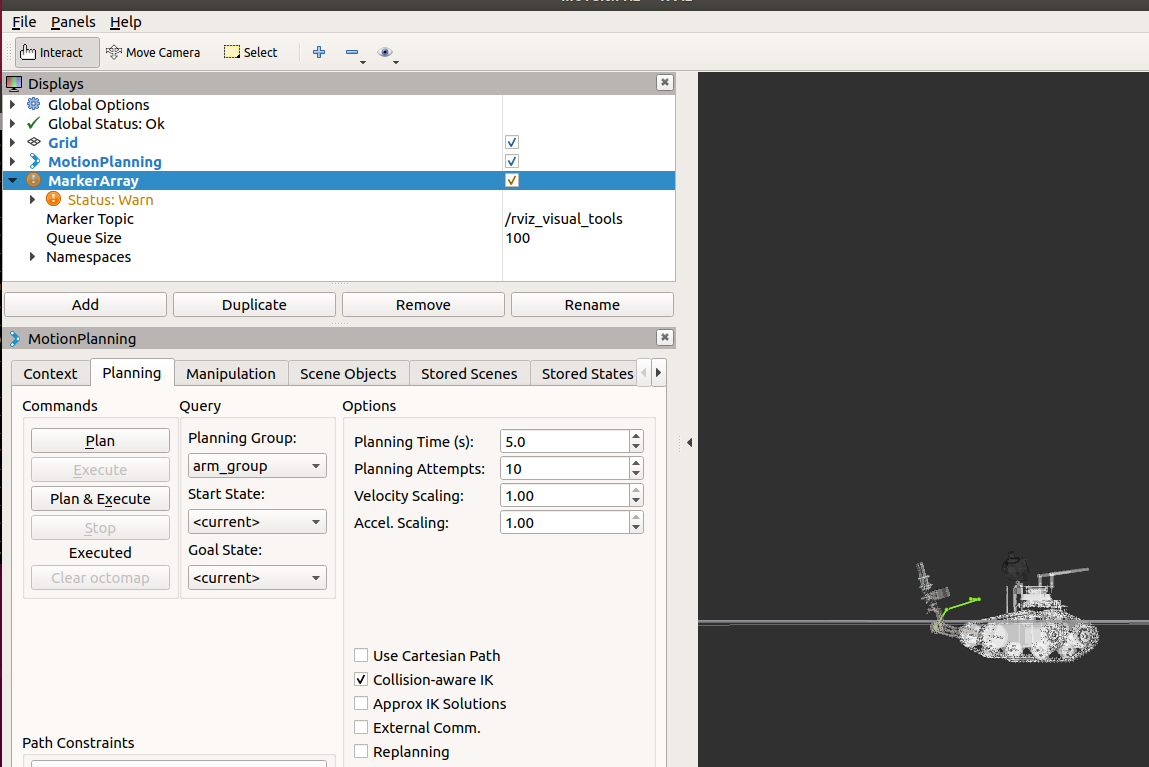
To view the track, you need to add the [MarkerArray] plugin and select the [/rviz_visual_tools] topic.
- Python code example
The python code does not have a similar trajectory to C++, and there is no special effect after running.
5.3. Source code
5.3.1. py file
Set specific location
xxxxxxxxxx rospy.loginfo("Set Init Pose") joints = [0.49, 0.93] transbot.set_joint_value_target(joints) transbot.execute(transbot.plan())Add waypoint
x # Initialize waypoint list waypoints = [] # If True, add the initial pose to waypoint list waypoints.append(start_pose) wpose = deepcopy(start_pose) wpose.position.x =0.00055 wpose.position.y =0.1139 wpose.position.z =0.049213 waypoints.append(deepcopy(wpose))
wpose.position.x =0.00055 wpose.position.y =0.11303 wpose.position.z =0.049142 waypoints.append(deepcopy(wpose))
wpose.position.x =0.00055 wpose.position.y =0.10873 wpose.position.z =0.048655 waypoints.append(deepcopy(wpose))
wpose.position.x =0.00055 wpose.position.y =0.10616 wpose.position.z =0.048255 waypoints.append(deepcopy(wpose))
wpose.position.x =0.00055 wpose.position.y =0.10446 wpose.position.z =0.047944 waypoints.append(deepcopy(wpose))Waypoint Planning
xxxxxxxxxx ''' waypoints:waypoints:waypoint list eef_step: terminal step value, calculate the inverse solution every 0.1m to determine whether it is reachable jump_threshold: jump threshold, set to 0 means jumping is not allowed plan: path, fraction: path planning coverage ''' (plan, fraction) = transbot.compute_cartesian_path(waypoints, 0.1, 0.0, True)5.3.1.C++ file
Set specific location
xxxxxxxxxx ROS_INFO("Set Init Pose."); //Set specific location vector<double> pose{0.28, 2.14}; transbot.setJointValueTarget(pose);Add waypoint
xxxxxxxxxx //Initialize waypoint vector std::vector<geometry_msgs::Pose> waypoints; //Add the initial pose to the waypoint list waypoints.push_back(start_pose); start_pose.position.x = 0.00055;start_pose.position.y = 0.10701;start_pose.position.z = 0.048397;waypoints.push_back(start_pose);
start_pose.position.x = 0.00055;start_pose.position.y = 0.17728;start_pose.position.z = 0.026649;waypoints.push_back(start_pose);
start_pose.position.x = 0.00055;start_pose.position.y = 0.19944;start_pose.position.z = -0.009218;waypoints.push_back(start_pose);
Waypoint planning
xxxxxxxxxxfraction = transbot.computeCartesianPath(waypoints, eef_step, jump_threshold, trajectory);