Handle ROS1 course
1、Operating environment Operating System: Ubuntu 18.04 ROS version: mellodic Devices: Jetson nano, Raspberry Pi, PC
2、Install the driver
sudo apt install ros-melodic-joy ros-melodic-joystick-drivers
3、Usage steps
Connect the USB end of the wireless controller to the device
- View Device
xxxxxxxxxxls /dev/input

- Test handle
xxxxxxxxxxsudo jstest /dev/input/js0

If jstest is not installed, run the following command:
xxxxxxxxxxsudo apt-get install joystick
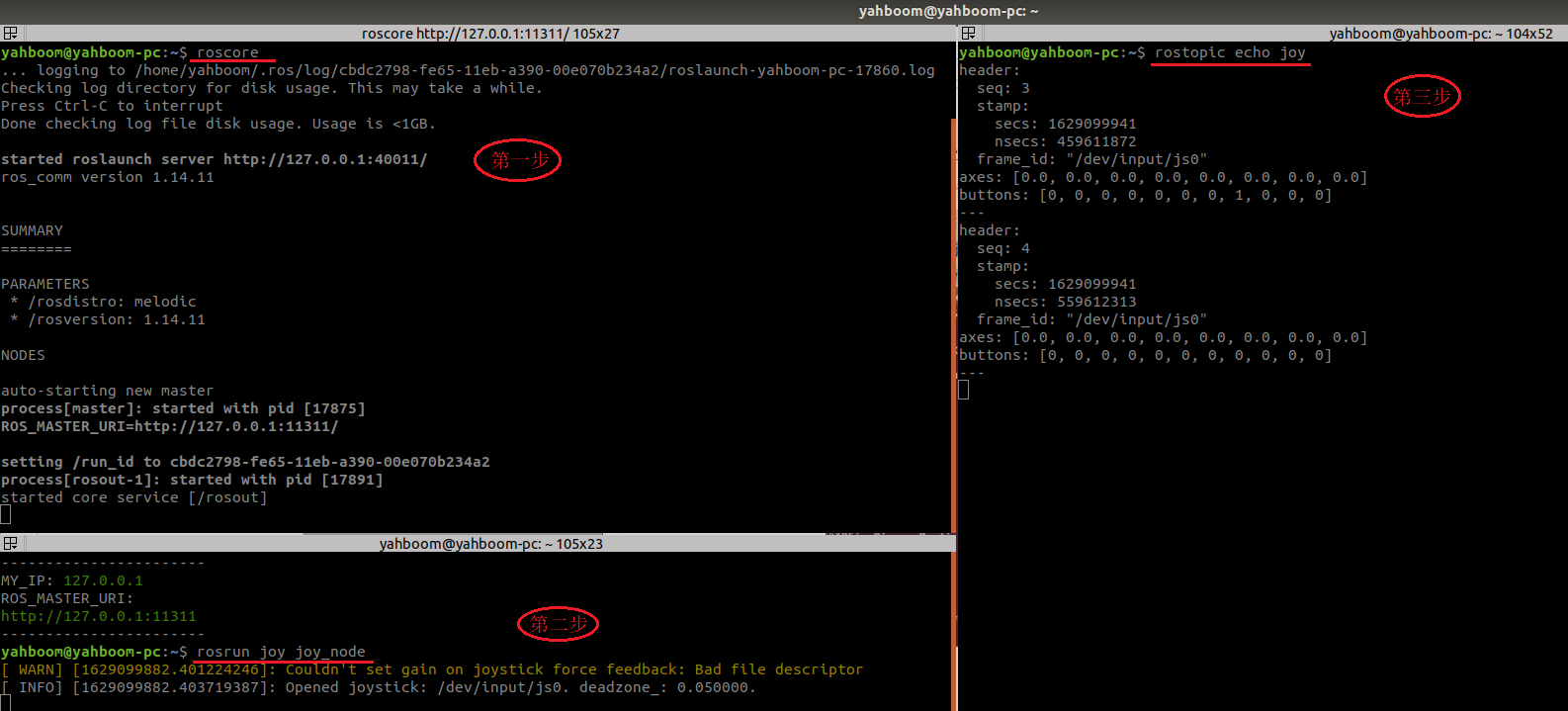
- Operation handle node
xroscore step1rosrun joy joy_node Step3rostopic echo joy Step3
4、Handle control Little Turtle
Copy the wireless handle control function package to the workspace, compile and update the environment
xCatkin_ Make # CompileSource dev/setup. bash # Update environmentNote: Any modifications to C++code require this step to take effect.
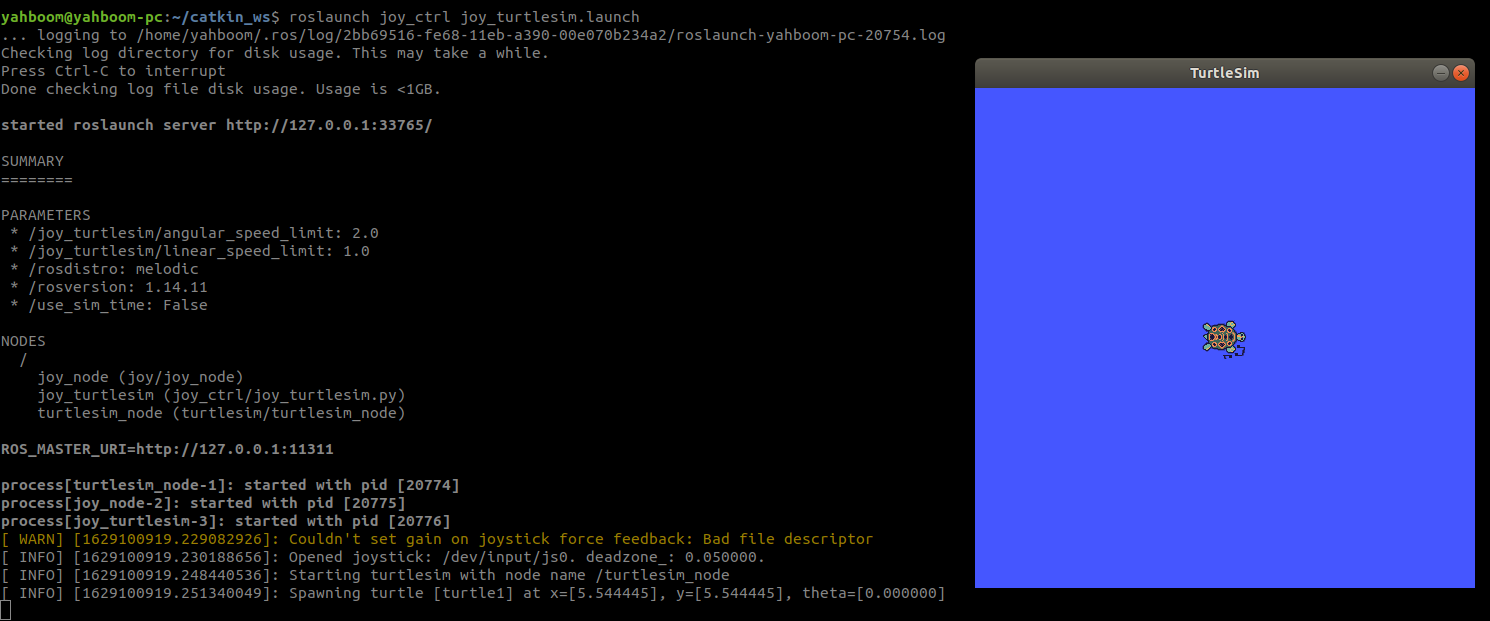
Start Python code command
xxxxxxxxxxroslaunch joy_ctrl joy_turtlesim.launch
Start C++code command
xxxxxxxxxxroslaunch joy_ctrl joy_turtle.launch
At this point, the handle can be used to control the operation of the little turtle. Corresponding relationship between the handle and the operation of the little turtle
| Handle | Little turtle |
|---|---|
| Left rocker up | forward |
| Left rocker down | back |
| Right rocker left | turn left |
| Right rocker right | turn right |
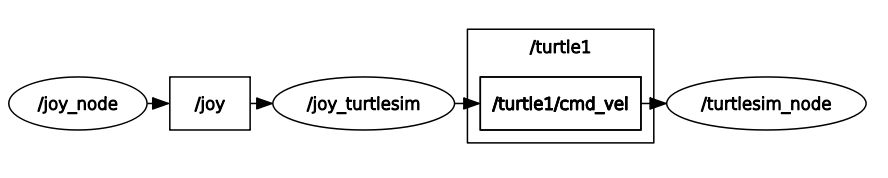
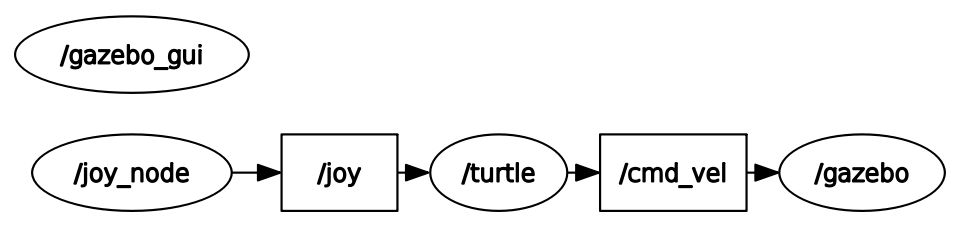
- View node diagram
xxxxxxxxxxrqt_graph
5、Handle controlled turbobot
Due to the need to start gazebo, there is a high demand for device performance. It is recommended to use it on a PC, as Jetson nano and Raspberry pie may become particularly sluggish and may not run properly.
Install gazebo and turbobot simulations
xxxxxxxxxxsudo apt-get updatesudo apt-get upgradesudo apt-get install gazebo9 libgazebo9-dev ros-melodic-turtlebot3*
Copy the wireless handle control function package to the workspace, compile and update the environment
xCatkin_ Make # CompileSource dev/setup. bash # Update environmentNote: Any modifications to C++code require this step to take effect.
Start Python code command
xxxxxxxxxxroslaunch joy_ctrl joy_turtlesim.launch
Start C++code command
xxxxxxxxxxroslaunch joy_ctrl joy_turtle.launch robot_simulation:=turtlebot
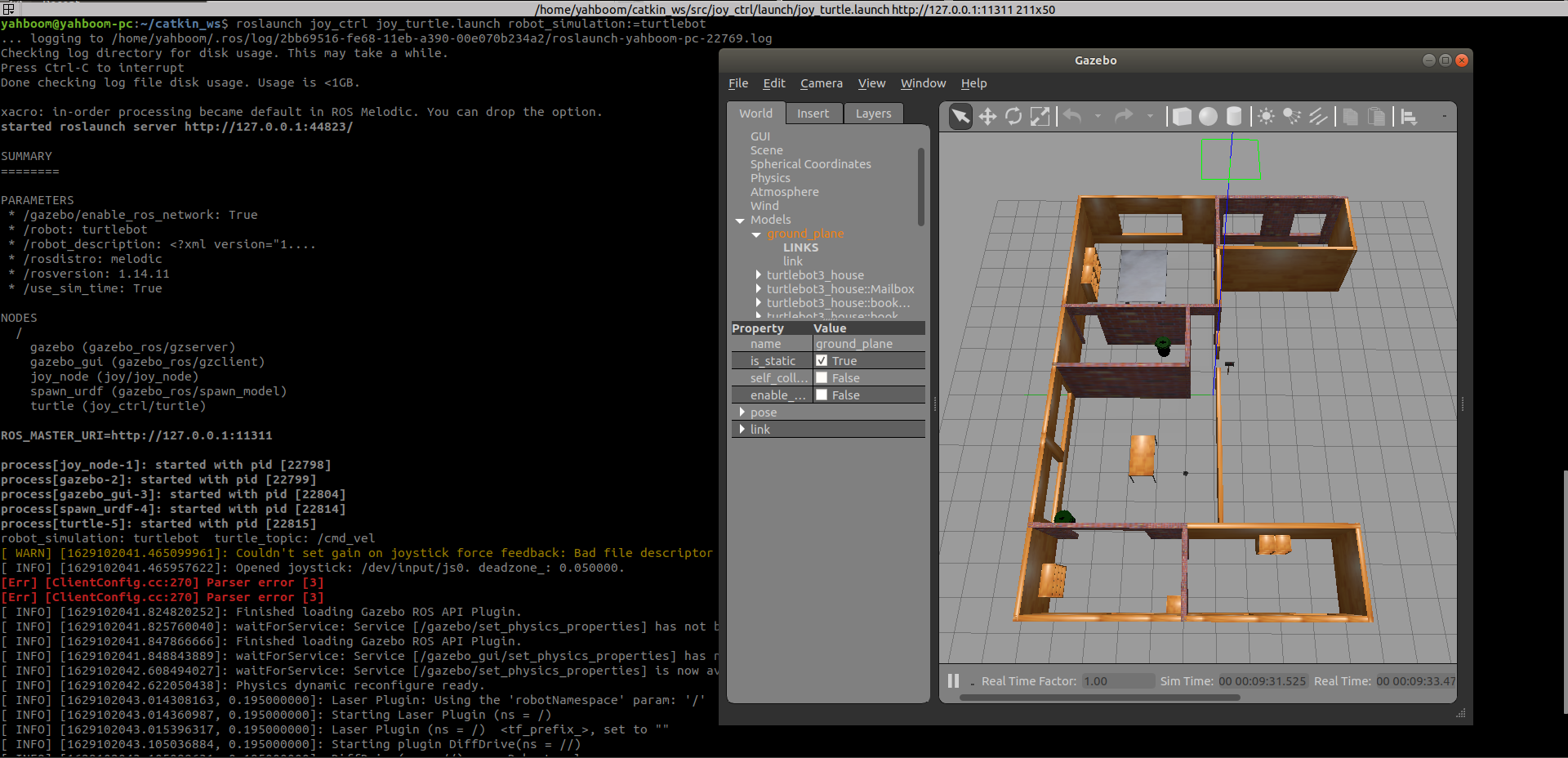
At this point, the handle can be used to control the operation of the turbobot.
Corresponding relationship between the handle and the operation of the little turtlebot
| Handle | turtlebot |
|---|---|
| Left rocker up | forward |
| Left rocker down | back |
| Right rocker left | turn left |
| Right rocker right | turn right |
- View node diagram
xxxxxxxxxxrqt_graph
- gazebo close command
xxxxxxxxxxkillall gzserver gzclient
Appendix
jetson nano
xxxxxxxxxxjoy_data.buttons: header:seq: 335stamp:secs: 1628324636nsecs: 962988952frame_id: "/dev/input/js0"axes: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]buttons: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
axes(8)
| Code Parsing | Handle buttons |
|---|---|
| axes[0] | Left rocker (left positive and right negative) |
| axes[1] | Left rocker (up positive and down negative) |
| axes[2] | Right rocker (left positive and right negative) |
| axes[3] | Right rocker (up positive and down negative) |
| axes[4] | |
| axes[5] | |
| axes[6] | Left button (left positive and right negative) |
| axes[7] | Left button (up positive and down negative) |
buttons(15)
| Code Parsing | Handle buttons |
|---|---|
| buttons[0] | A |
| buttons[1] | B |
| buttons[2] | |
| buttons[3] | X |
| buttons[4] | Y |
| buttons[5] | |
| buttons[6] | L1 |
| buttons[7] | R1 |
| buttons[8] | L2 |
| buttons[9] | R2 |
| buttons[10] | SELECT |
| buttons[11] | START |
| buttons[12] | |
| buttons[13] | Press left rocker |
| buttons[14] | Press right rocker |
Raspberry Pi
xxxxxxxxxxjoy_data.buttons: header:seq: 264stamp:secs: 1628326479nsecs: 848359307frame_id: "/dev/input/js0"axes: [-0.0, -0.0, 0.0, -0.0, -0.0, 0.0, 0.0, 0.0]buttons: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
axes(8)
| Code Parsing | Handle buttons |
|---|---|
| axes[0] | Left rocker (left positive and right negative) |
| axes[1] | Left rocker (up positive and down negative) |
| axes[2] | L2(Press:-1,release:1) |
| axes[3] | Right rocker (left positive and right negative) |
| axes[4] | Right rocker (up positive and down negative) |
| axes[5] | R2(Press:-1,release:1) |
| axes[6] | Left button (left positive and right negative) |
| axes[7] | Left button (up positive and down negative) |
buttons(11)
| Code Parsing | Handle buttons |
|---|---|
| buttons[0] | A |
| buttons[1] | B |
| buttons[2] | X |
| buttons[3] | Y |
| buttons[4] | L1 |
| buttons[5] | R1 |
| buttons[6] | SELECT |
| buttons[7] | START |
| buttons[8] | MODE |
| buttons[9] | Press left rocker |
| buttons[10] | Press right rocker |