5、Patrol function gameplay
1、Program function description
After the program starts, open the patrol route set by the dynamic parameter setter, click the "switch" of the GUI interface, the trolley moves according to the set patrol route, during operation, the radar works at the same time, and if an obstacle is detected within the detection range, it will stop. After the controller program is turned on, you can also pause/resume the trolley movement through the R2 button.
2、Program code reference path
After entering the docker container, the location of the source code of this function is located at,
/root/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_bringup/yahboomcar_bringup/patrol_a1_X3.py3、The program starts
3.1、start the command
After entering the docker container, according to the actual model and radar model, the terminal input,
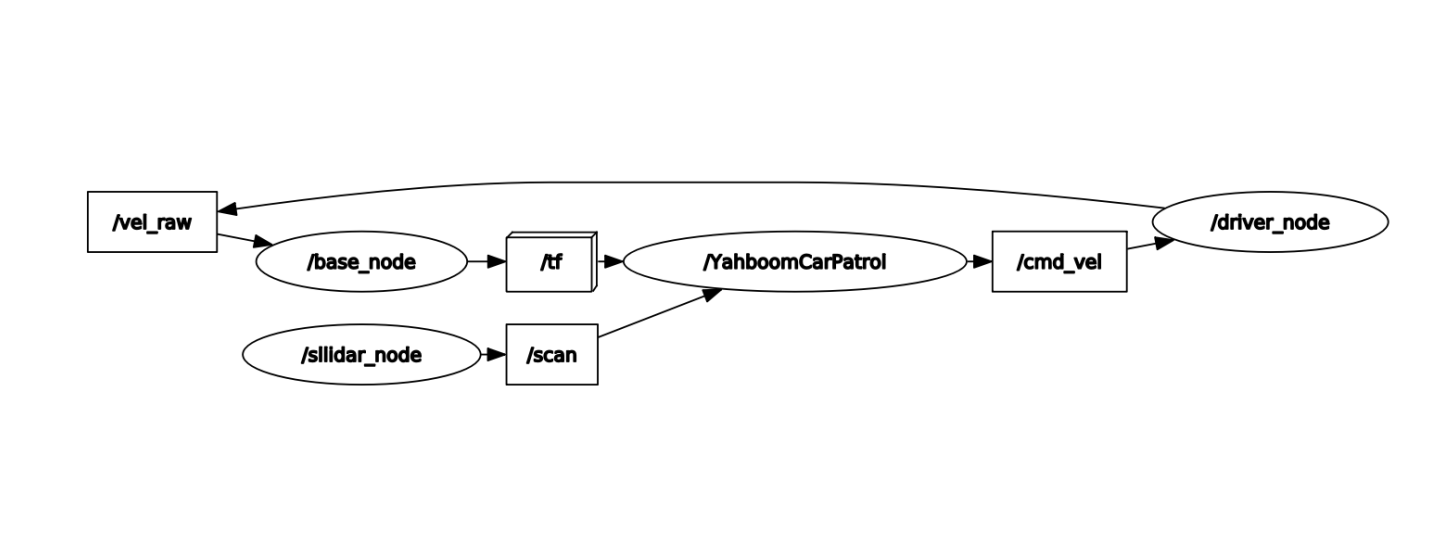
xxxxxxxxxx#Start the trolley chassisros2 run yahboomcar_bringup Mcnamu_driver_X3ros2 run yahboomcar_base_node base_node_X3#Start the A1 radarros2 launch sllidar_ros2 sllidar_launch.py#Start the S2 radarros2 launch sllidar_ros2 sllidar_s2_launch.py#Start the patrol program X3 modelros2 run yahboomcar_bringup patrol_a1_X3#Start the handle, if neededros2 run yahboomcar_ctrl yahboom_joy_X3ros2 run joy joy_node3.2、View the topic communication node diagram
docker terminal input,
xxxxxxxxxxros2 run rqt_graph rqt_graph
Set the size of parameters via dynamic parameter adjuster, terminal input,
xxxxxxxxxxros2 run rqt_reconfigure rqt_reconfigure
The parameters of the dynamic parameter regulator are described as follows:

| Parameter name | Parameter meaning |
|---|---|
| odom_frame | Odometer coordinate system |
| base_frame | Coordinate system |
| circle_adjust | Rotational angular velocity adjustment factor |
| Switch | Gameplay switch |
| Command | Patrol routes |
| Set_loop | Set up a loop |
| ResponseDist | Radar obstacle avoidance response range |
| LaserAngle | Radar scan angle |
| Linear | Line speed |
| Angular | angular velocity |
| Length | Straight-line test distance |
| RotationTolerance | Steering error tolerance |
| RotationScaling | Corner scale factor |
After the program starts, enter any of the following routes in the Comand field in the GUI interface of the Dynamic Parameter Adjuster interface:
LengthTest: Straight-line test
Circle: Circular route patrol
Square: Square route patrol
Triangle: Triangle route patrol
After selecting the route, click the blank parameter to write, and then click the Switch button to start the patrol movement. If the loop is set, you can loop through the previous route to patrol, and if the loop is false, it will stop when the patrol is completed.
4、Core source code analysis
The implementation source code of this code is to subscribe to the TF transformation of odom and base_footprintf, so that you can know "how long you have walked" at any time, and then issue speed instructions according to the set route, take Triangle as an example, here to do the analysis,
xxxxxxxxxx#Set the patrol route and enter the self. Triangle functionself.command_src = "Triangle"triangle = self.Triangle()#Take part of self. Triangle code parsingdef Triangle(self): if self.index == 0: print("Length") step1 = self.advancing(self.Length) #Start with a straight line and walk through one side of the triangle #sleep(0.5) if step1 == True: #self.distance = 0.0 self.index = self.index + 1; self.Switch = rclpy.parameter.Parameter('Switch',rclpy.Parameter.Type.BOOL,True) all_new_parameters = [self.Switch] self.set_parameters(all_new_parameters) elif self.index == 1: print("Spin") step2 = self.Spin(120)#随后调换方向,转向120,三角形3*120=360 #sleep(0.5) if step2 == True: self.index = self.index + 1; self.Switch = rclpy.parameter.Parameter('Switch',rclpy.Parameter.Type.BOOL,True) all_new_parameters = [self.Switch] self.set_parameters(all_new_parameters)#The following goes through 3 loops, that is, to complete the triangle patrol, mainly to see the self.advancing and self.Spin functions, these two functions will return True after the execution is completed, def advancing(self,target_distance): #Here's how to get the xy coordinates, calculate the coordinates with the previous moment, and calculate how far you have come #The way to get XY coordinates is to listen to the tf transformation of Odom and base_footprint, which can refer to the self.get_position() function self.position.x = self.get_position().transform.translation.x self.position.y = self.get_position().transform.translation.y move_cmd = Twist() self.distance = sqrt(pow((self.position.x - self.x_start), 2) + pow((self.position.y - self.y_start), 2)) self.distance *= self.LineScaling print("distance: ",self.distance) self.error = self.distance - target_distance move_cmd.linear.x = self.Linear if abs(self.error) < self.LineTolerance : print("stop") self.distance = 0.0 self.pub_cmdVel.publish(Twist()) self.x_start = self.position.x; self.y_start = self.position.y; self.Switch = rclpy.parameter.Parameter('Switch',rclpy.Parameter.Type.BOOL,False) all_new_parameters = [self.Switch] self.set_parameters(all_new_parameters) return True else: if self.Joy_active or self.warning > 10: if self.moving == True: self.pub_cmdVel.publish(Twist()) self.moving = False print("obstacles") else: #print("Go") self.pub_cmdVel.publish(move_cmd) self.moving = True return False def Spin(self,angle): self.target_angle = radians(angle) #The following is to obtain the pose, calculate how many degrees you turned, and get the pose can refer to the self.get_odom_angle function, which is also obtained by listening to the TF transformation of odom and base_footprint. self.odom_angle = self.get_odom_angle() self.delta_angle = self.RotationScaling * self.normalize_angle(self.odom_angle - self.last_angle) self.turn_angle += self.delta_angle print("turn_angle: ",self.turn_angle) self.error = self.target_angle - self.turn_angle print("error: ",self.error) self.last_angle = self.odom_angle move_cmd = Twist() if abs(self.error) < self.RotationTolerance or self.Switch==False : self.pub_cmdVel.publish(Twist()) self.turn_angle = 0.0 '''self.Switch = rclpy.parameter.Parameter('Switch',rclpy.Parameter.Type.BOOL,False) all_new_parameters = [self.Switch] self.set_parameters(all_new_parameters)''' return True if self.Joy_active or self.warning > 10: if self.moving == True: self.pub_cmdVel.publish(Twist()) self.moving = False print("obstacles") else: if self.Command == "Square" or self.Command == "Triangle": #move_cmd.linear.x = 0.2 move_cmd.angular.z = copysign(self.Angular, self.error) elif self.Command == "Circle": length = self.Linear * self.circle_adjust / self.Length #The circle_adjust here is the coefficient of the angle of rotation, and the larger the length can be understood, the greater the radius of the circle #print("length: ",length) move_cmd.linear.x = self.Linear move_cmd.angular.z = copysign(length, self.error) #print("angular: ",move_cmd.angular.z) '''move_cmd.linear.x = 0.2 move_cmd.angular.z = copysign(2, self.error)''' self.pub_cmdVel.publish(move_cmd) self.moving = True