2. Lidar obstacle avoidance fun gameplay
2. Lidar obstacle avoidance fun gameplay2.1 Description of program function2.2. Program Code reference path2.3. Program Startup2.3.1. Car start command2.3.2. Modifying parameters on the VM side2.3.3. View the topic communication node graph2.4. Core Source Code Analysis
2.1 Description of program function
After the program starts, the car will move forward, when there is an obstacle in the detection range, it will adjust its attitude, avoid the obstacle, and then continue to move forward.
Enable/pause this function by starting the Dynamic Parameter Adjuster on the virtual machine and clicking [Switch].
In addition, the [L1] button on the handle locks/turns on the car's motion controls. When motion control is enabled, the function is locked; This function can be turned on when the motion control is locked.
2.2. Program Code reference path
After SSH connection car, the location of the function source code is located at,
#python文件#python file/userdata/yahboomcar_ws/src/yahboomcar_laser/yahboomcar_laser/laser_avoidance.py#launch文件#launch file/userdata/yahboomcar_ws/src/yahboomcar_laser/launch/laser_avoidance_launch.py2.3. Program Startup
2.3.1. Car start command
After SSH connects to the car, terminal input,
xxxxxxxxxxros2 launch yahboomcar_laser laser_avoidance_launch.py2.3.2. Modifying parameters on the VM side
On the virtual machine, open the dynamic parameter adjuster, open the terminal input,
xxxxxxxxxxros2 run rqt_reconfigure rqt_reconfigure
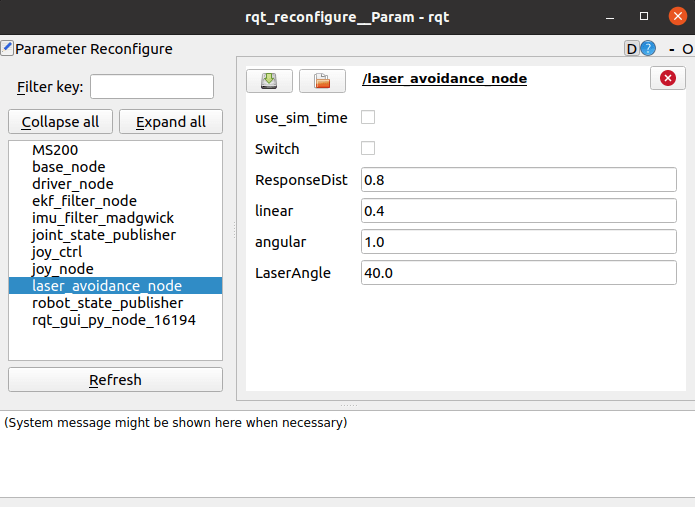
The meaning of each parameter is as follows.
| parameter name | parameter meaning |
|---|---|
| Switch | Play switch |
| ResponseDist | Obstacle detection distance |
| linear | The linear velocity |
| angular | Angular velocity |
| LaserAngle | Radar detection Angle |
The above parameters can be adjusted. By checking or unchecking [Switch], the radar obstacle avoidance function can be enabled or suspended.
The other four need to be set when the decimal, modify, press the enter key or click the blank space can be written.
2.3.3. View the topic communication node graph
Virtual machine terminal input,
xxxxxxxxxxros2 run rqt_graph rqt_graph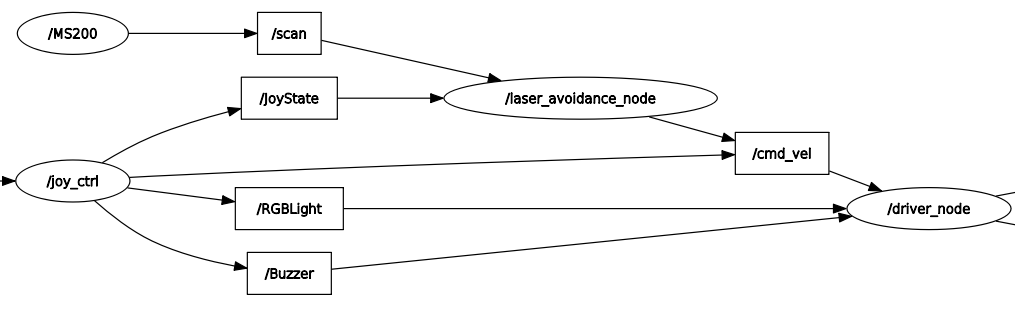
2.4. Core Source Code Analysis
Mainly look at the radar callback function, which explains how to obtain the obstacle distance information at each Angle.
x
def registerScan(self, scan_data): if not isinstance(scan_data, LaserScan): return self.right_warning = 0 self.left_warning = 0 self.front_warning = 0
ranges = np.array(scan_data.ranges) for i in range(len(ranges)): if ranges[i] < self.ResponseDist: #range[i]就是雷达扫描的结果,这里指的是距离信息 #range[i] is the result of radar scanning, here refers to the range information angle = (scan_data.angle_min + scan_data.angle_increment * i) * 180 / pi #雷达的信息的angle是弧度制,这里要转换成角度进行计算 # The angle of radar information is a radian system, which should be converted into an Angle for calculation if angle > 180: angle = angle - 360 #angle是根据雷达的结构来设定判断范围的#angle is based on the structure of the radar to set the judgment range if -self.LaserAngle < angle < -20: self.right_warning += 1 elif abs(angle) <= 20: self.front_warning += 1 elif 20 < angle < self.LaserAngle: self.left_warning += 1
if self.Joy_active == True or self.Switch == False: if self.Moving == True: self.pub_vel.publish(Twist()) self.Moving = not self.Moving return self.Moving = True