3. ROS+Opencv basics
3. ROS+Opencv basics3.1. Overview3.2 Gemini23.2.1. Start the Gemini2 camera3.2.2. Start the color graph subscription node3.2.3. Start the depth map subscription node3.2.4 Start color image inversion
This lesson uses the Gemini2 camera as an example, which is similar to a normal camera.
3.1. Overview
Wiki: http://wiki.ros.org/cv_bridge/
Teaching: http://wiki.ros.org/cv_bridge/Tutorials
Source code: https://github.com/ros-perception/vision_opencv.git
Feature package location: ~/astra_ws/src/astra_visual
ROS has been integrated with Opencv3.0 and above during the installation process, so the installation and configuration hardly need to be considered. ROS in their own
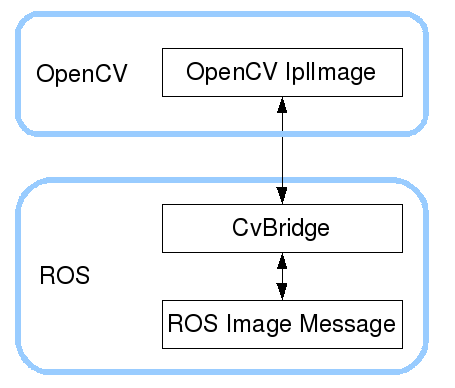
message format Image, not directly to Image processing, However, the provided [CvBridge] can perfectly convert and be converted image data formats. [CvBridge] is a ROS library that acts as a bridge between ROS and Opencv.
Opencv and ROS image data conversion is shown in the figure below:
Although the installation configuration does not need to be much thought, but the use of the environment still need to be configured, mainly 【package.xml】 and 【CMakeLists.txt】 these two files. The function pack not only uses [CvBridge], but also needs [Opencv] and [PCL], so it is configured together.
- package.xml
Add the following
x <build_depend>sensor_msgs</build_depend> <build_export_depend>sensor_msgs</build_export_depend> <exec_depend>sensor_msgs</exec_depend> <build_depend>std_msgs</build_depend> <build_export_depend>std_msgs</build_export_depend> <exec_depend>std_msgs</exec_depend> <build_depend>cv_bridge</build_depend> <build_export_depend>cv_bridge</build_export_depend> <exec_depend>cv_bridge</exec_depend> <exec_depend>image_transport</exec_depend>[cv_bridge] : Image conversion dependency package.
【transbot_msgs】 : Custom message dependency package.
- CMakeLists.txt
This file contains many configurations. For details, see the source file.
3.2 Gemini2
3.2.1. Start the Gemini2 camera
xxxxxxxxxxroslaunch orbbec_camera gemini2.launch
View topic
xxxxxxxxxxrostopic list
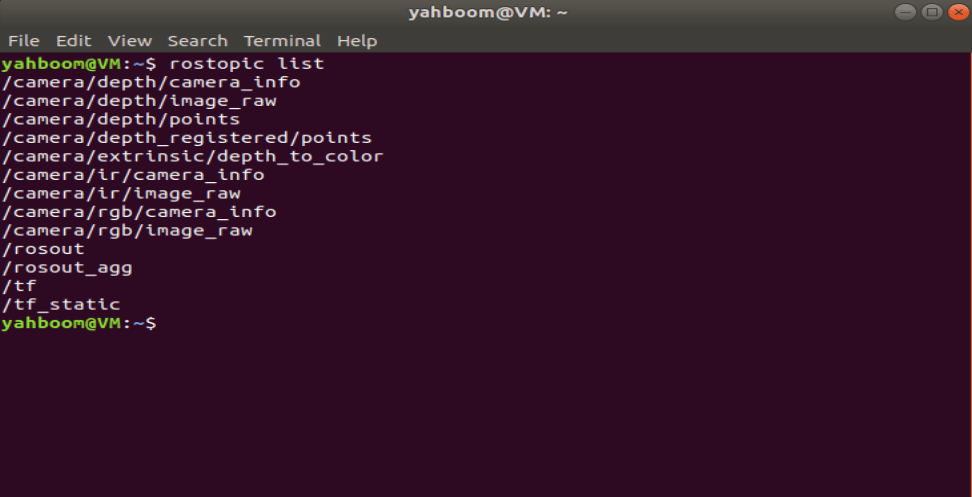
As you can see, there are many topics, but only a few are commonly used in this section
| Topic name | Data type |
|---|---|
| /camera/depth/image_raw | sensor_msgs/Image |
| /camera/rgb/image_raw | sensor_msgs/Image |
| /camera/ir/image_raw | sensor_msgs/Image |
| /camera/depth/points | sensor_msgs/PointCloud2 |
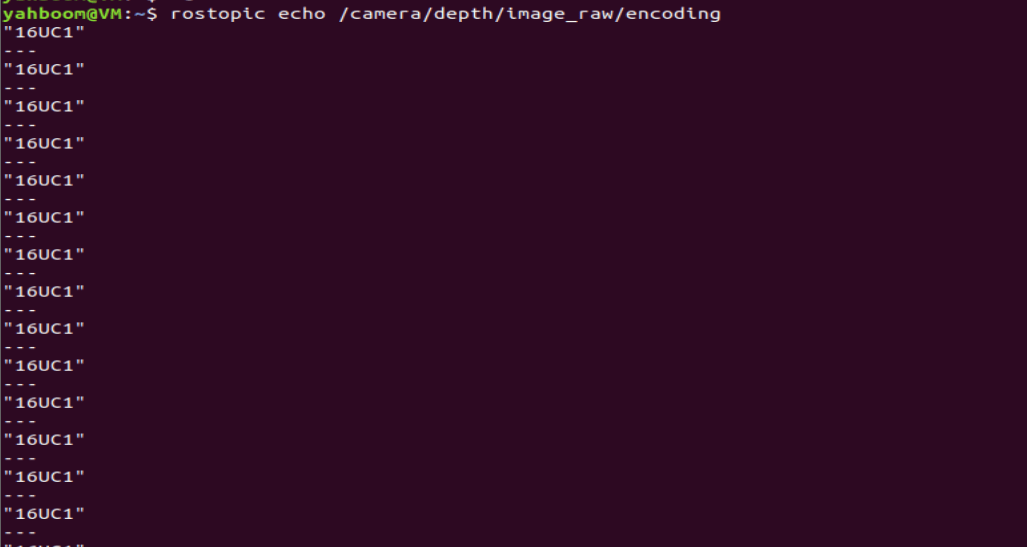
View the topic encoding format: rostopic echo + [topic] +encoding, for example
xxxxxxxxxxrostopic echo /camera/rgb/image_raw/encodingrostopic echo /camera/depth/image_raw/encoding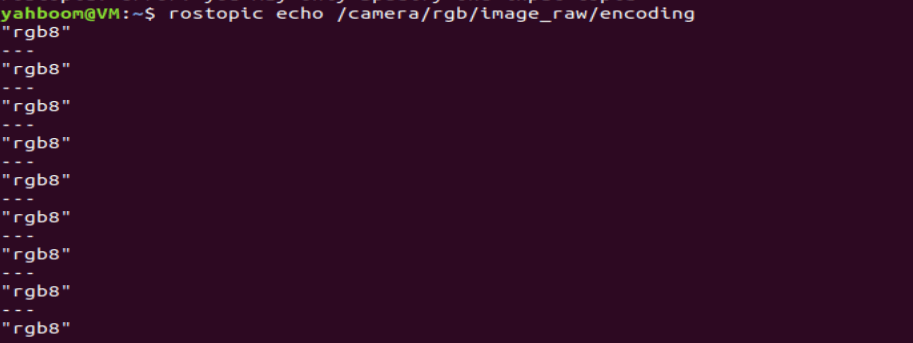
3.2.2. Start the color graph subscription node
xxxxxxxxxxroslaunch orbbec_camera gemini2.launch #启动相机launch# Start camera launchroslaunch astra_visual astra_get_rgb.launch #启动功能launch# start launch functionSelect 1 of the following two nodes to start the launch file.
xxxxxxxxxxastra_rgb_image.py # py astra_rgb_image # C++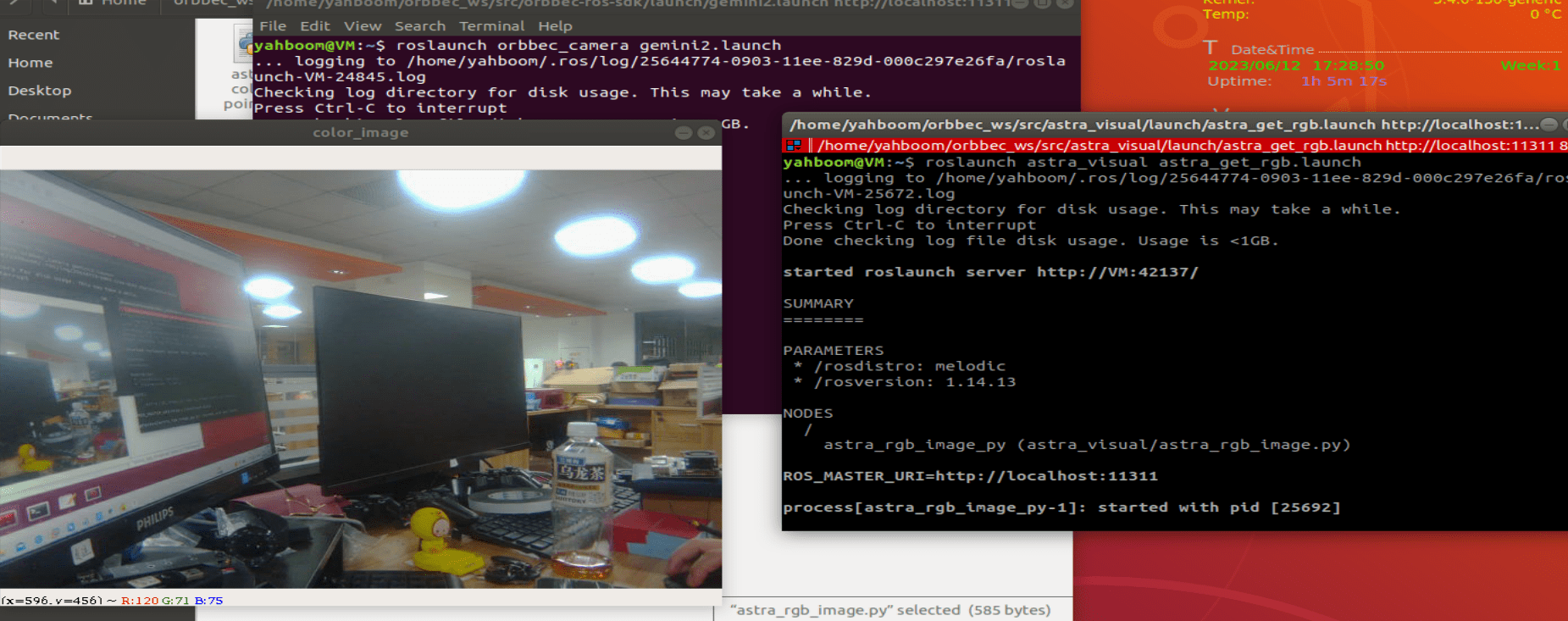
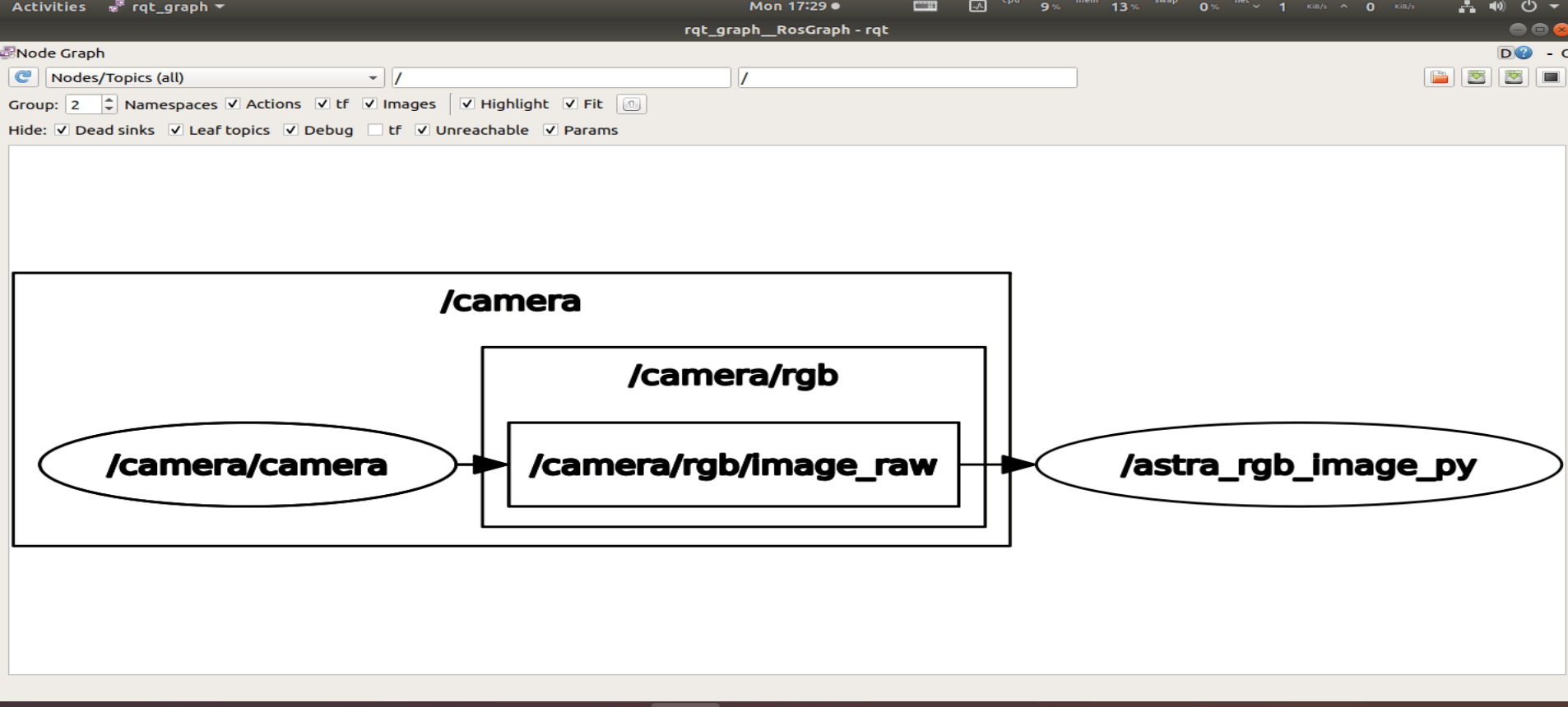
View node diagram
xxxxxxxxxxrqt_graph
- py Code analysis
Create a subscriber: Subscribe to the topic ["/camera/rgb/image_raw"], data type [Image], callback function [topic()]
xxxxxxxxxxsub = rospy.Subscriber("/camera/rgb/image_raw", Image, topic)Use [CvBridge] for data conversion, here we should pay attention to the encoding format, the encoding format is wrong, the converted image will have problems.
xxxxxxxxxxframe = bridge.imgmsg_to_cv2(msg, "bgr8")- c++ code analysis
Similar to py code
xxxxxxxxxx//创建一个接收者.// Create a recipient.ros::Subscriber subscriber = n.subscribe<sensor_msgs::Image>("/camera/rgb/image_raw", 10, RGB_Callback);// 创建cv_bridge示例 // Create a cv_bridge examplecv_bridge::CvImagePtr cv_ptr;// 数据转换 // Data conversioncv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);3.2.3. Start the depth map subscription node
xxxxxxxxxxroslaunch orbbec_camera gemini2.launch #启动相机launch# Start camera launchroslaunch astra_visual astra_get_depth.launch # launch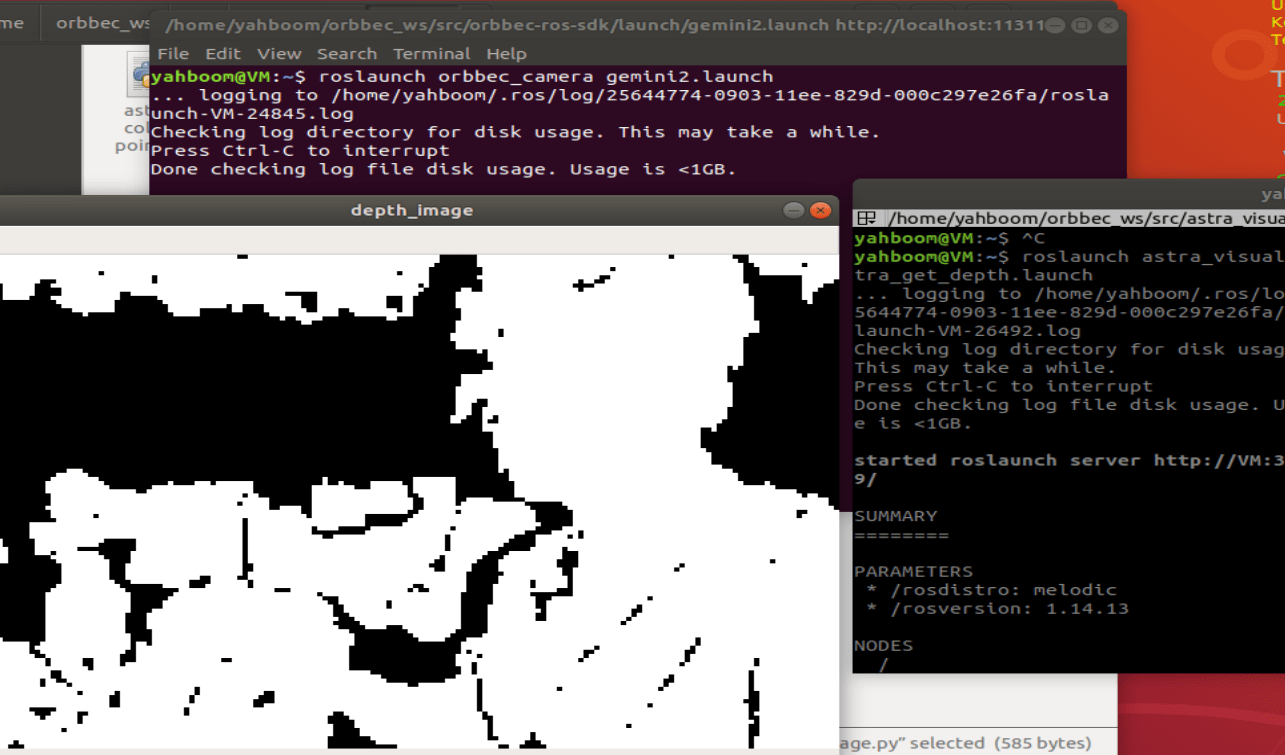
Select 1 of the following two nodes to start the launch file.
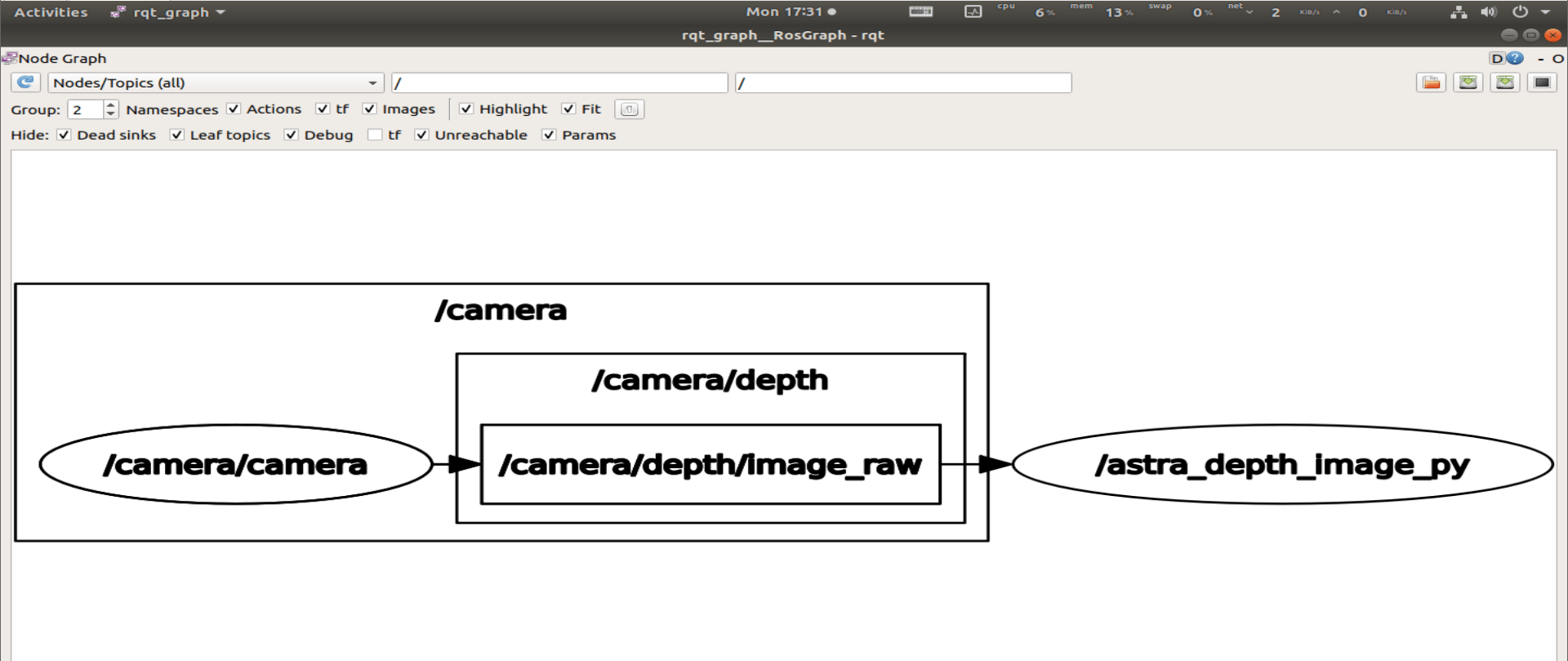
xxxxxxxxxxastra_depth_image.py # py astra_depth_image # C++View node diagram
xxxxxxxxxxrqt_graph
- py Code analysis
Create a subscriber: Subscribe to the topic ["/camera/depth/image_raw"], data type [Image], callback function [topic()]
xxxxxxxxxxsub = rospy.Subscriber("/camera/depth/image_raw", Image, topic)Use [CvBridge] for data conversion, here we should pay attention to the encoding format, the encoding format is wrong, the converted image will have problems.
xxxxxxxxxx# 编码格式# Encoding formatencoding = ['16UC1', '32FC1']# 可以切换不同编码格式测试效果# You can switch between different encoding formatsframe = bridge.imgmsg_to_cv2(msg, encoding[1])- c++ code analysis
Similar to py code
xxxxxxxxxx//创建一个接收者.// Create a recipient.ros::Subscriber subscriber = n.subscribe<sensor_msgs::Image>("/camera/depth/image_raw", 10, depth_Callback);// 创建cv_bridge示例 // Create a cv_bridge examplecv_bridge::CvImagePtr cv_ptr;// 数据转换 // Data conversioncv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::TYPE_16UC1);3.2.4 Start color image inversion
xxxxxxxxxxroslaunch orbbec_camera gemini2.launch #开启相机launch# Start camera launchroslaunch astra_visual astra_image_flip.launch #开启功能launch# Enable function launchImage viewing
xxxxxxxxxxrqt_image_view #开启第一个# Open the first onerqt_image_view #开启第二个# Open the second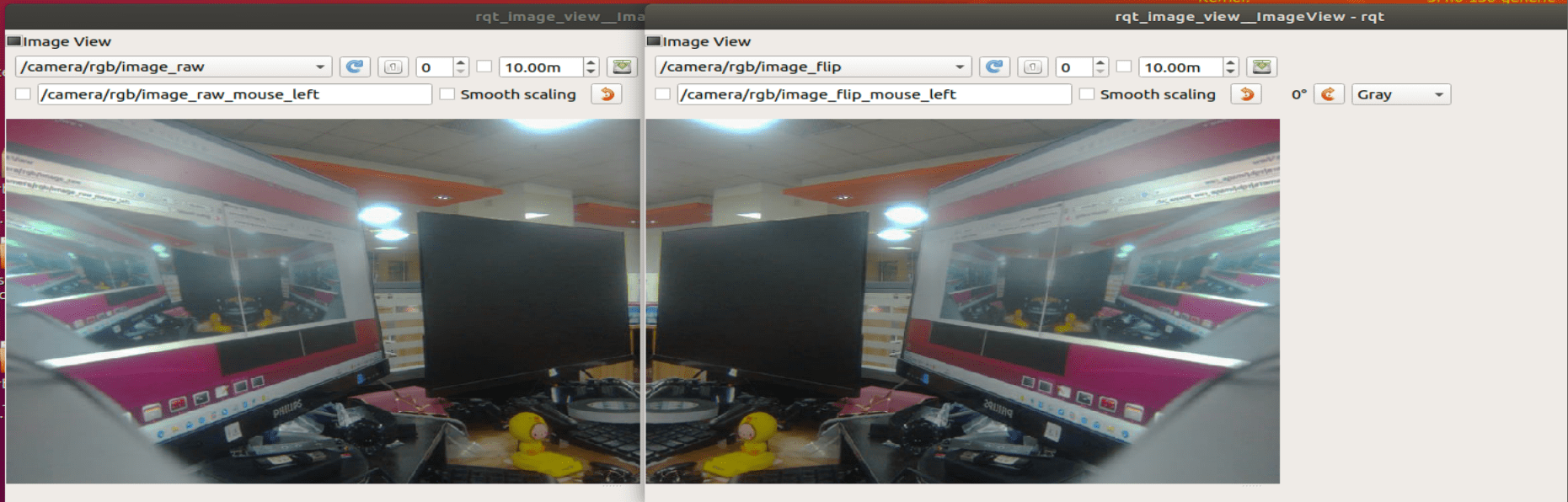
- py Code analysis
Two subscribers and two publishers are created here, one for general image data and one for compressed image data.
1) Create subscribers
Subscribe to the topic ["/camera/rgb/image_raw"], data type [Image], callback function [topic()].
2) Create a publisher
The topics published are ["/camera/rgb/image_flip"], data type [Image], queue size [10].
xxxxxxxxxxsub_img = rospy.Subscriber("/camera/rgb/image_raw", Image, topic)pub_img = rospy.Publisher("/camera/rgb/image_flip", Image, queue_size=10)3) Callback function
xxxxxxxxxx# 正常图像传输处理# Normal image transmission processingdef topic(msg): if not isinstance(msg, Image): return bridge = CvBridge() frame = bridge.imgmsg_to_cv2(msg, "bgr8") # Opencv处理图像# Opencv processes images frame = cv.resize(frame, (640, 480)) frame = cv.flip(frame, 1) # opencv mat -> ros msg msg = bridge.cv2_to_imgmsg(frame, "bgr8") # 图像处理完毕,直接发布# Image processing is complete, release directly pub_img.publish(msg)