1. Mobile APP remote control tutorial
1. Mobile APP remote control tutorial1.1 Install APP by scanning code on mobile phone1. 2. APP Connection to Rosmaster1.2.1. Select Device1.2.2. Establish network connection1.3. APP Function Introduction1.3.1 Remote Control1.3.2 McNamee1.3.3. Dazzle Lights1.3. 4 use guidelines
1.1 Install APP by scanning code on mobile phone
For Android system users, please open Google Play app shop and search for [MakerControl], or open your mobile phone browser and scan the QR code below to download and install [MakerControl] APP.
For IOS system users, please open the App store and search for [MakerControl], or open the code scanner and scan the QR code below to download and install [MakerControl] APP.
If the latest version of [MakerControl] APP is already installed on your mobile phone, you do not need to install it again.

1. 2. APP Connection to Rosmaster
Rosmaster factory system comes with a hotspot signal [ROSMASTER], password [12345678], you can use your mobile phone to connect to Rosmaster's hotspot signal to form a LAN. Or connect both Rosmaster and mobile phone to the same router to form a LAN.
1.2.1. Select Device
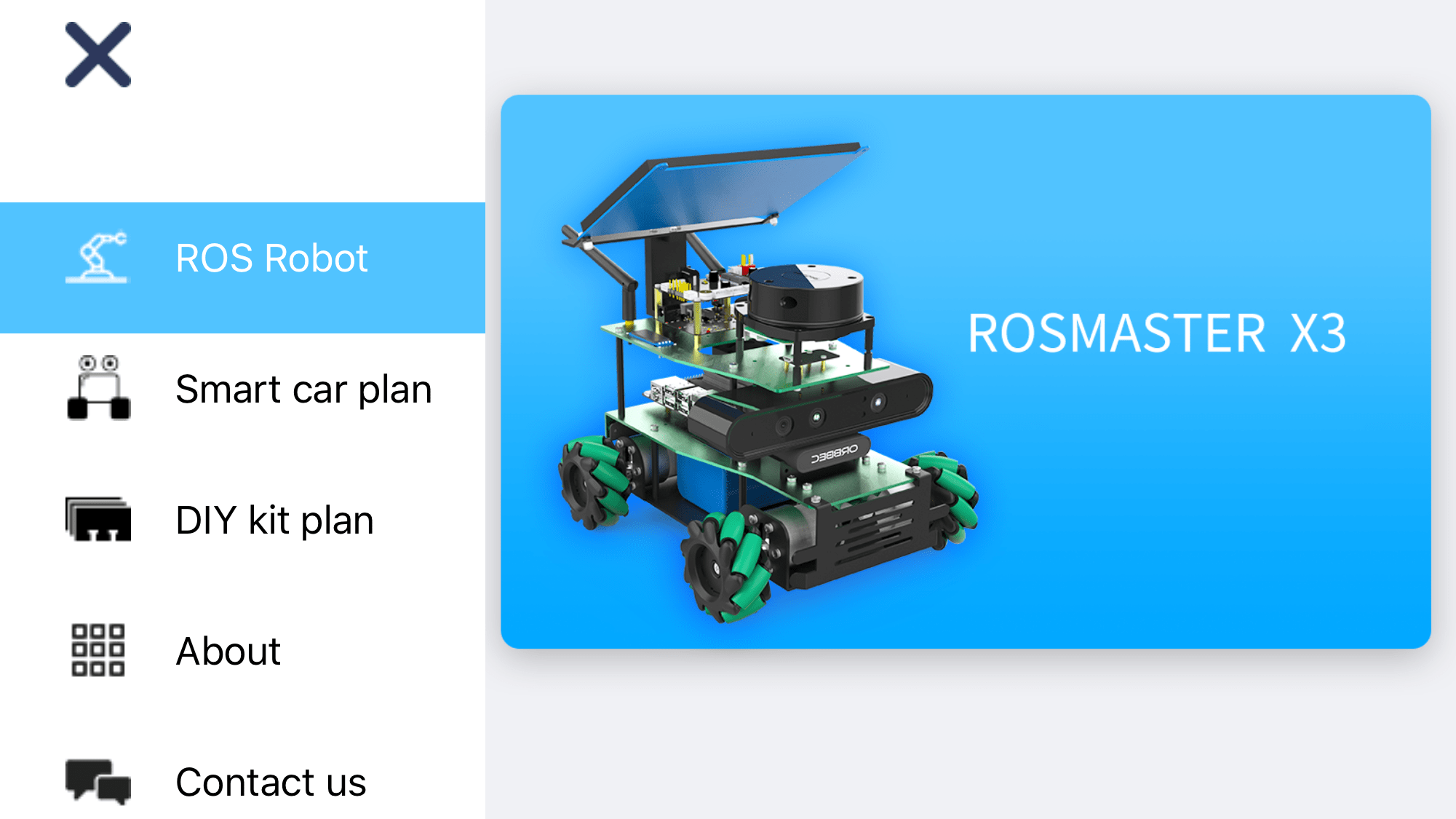
The first time you open the [MakerControl] APP, according to the purchased robot model, you need to select the [Rosmaster X3] device in the [ROS Robot].
1.2.2. Establish network connection
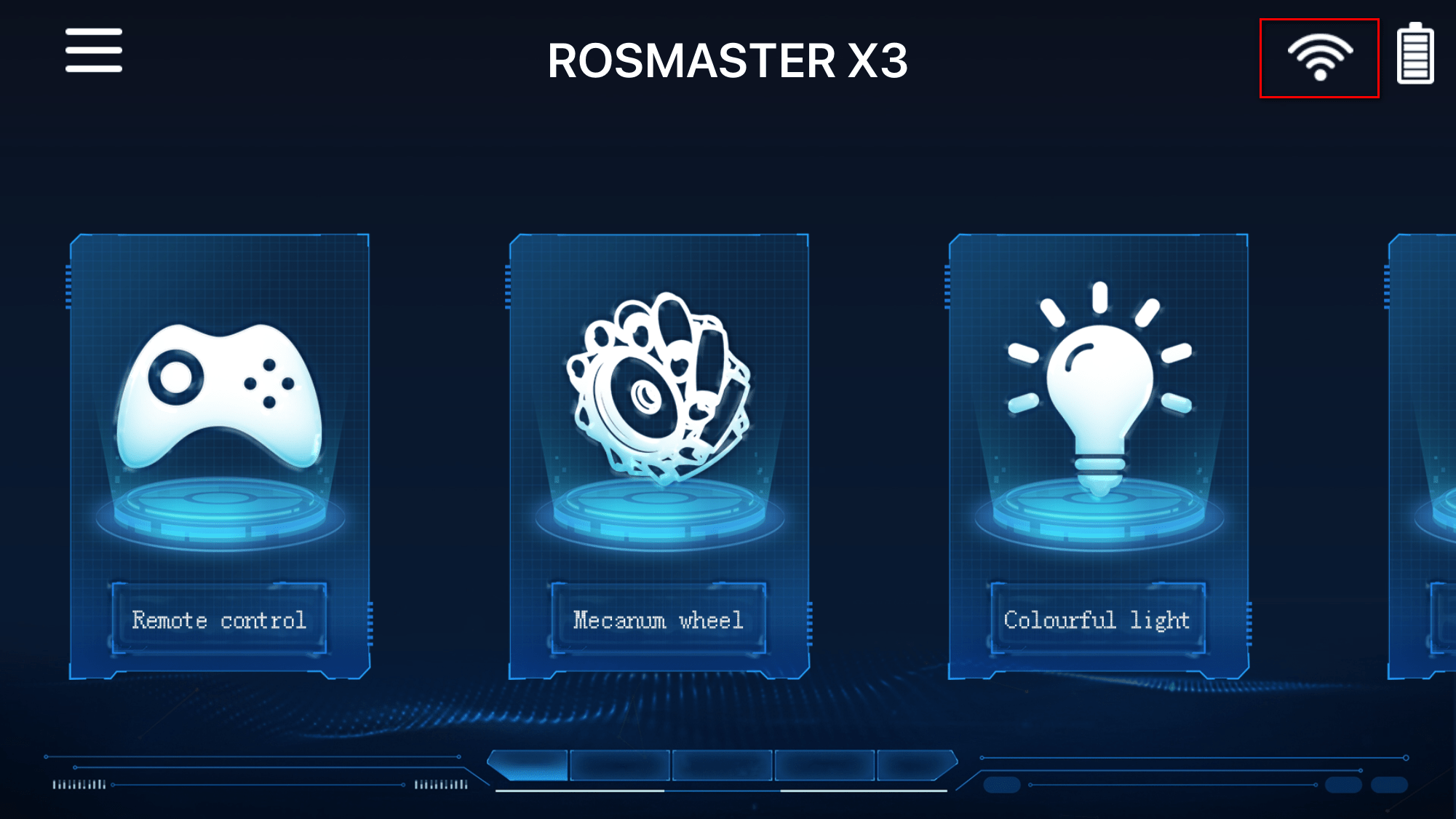
Click the WiFi icon in the upper right corner to connect to the ROSMASTER robot.
Fill in the IP address displayed by the OLED in the ROSMASTER robot in the IP column, and use the default parameters in the Port and Video columns, click [Connect], and you will automatically jump to the main control interface after a successful connection, and at the same time, the WiFi icon in the upper-right corner no longer appears as a forbidden symbol.
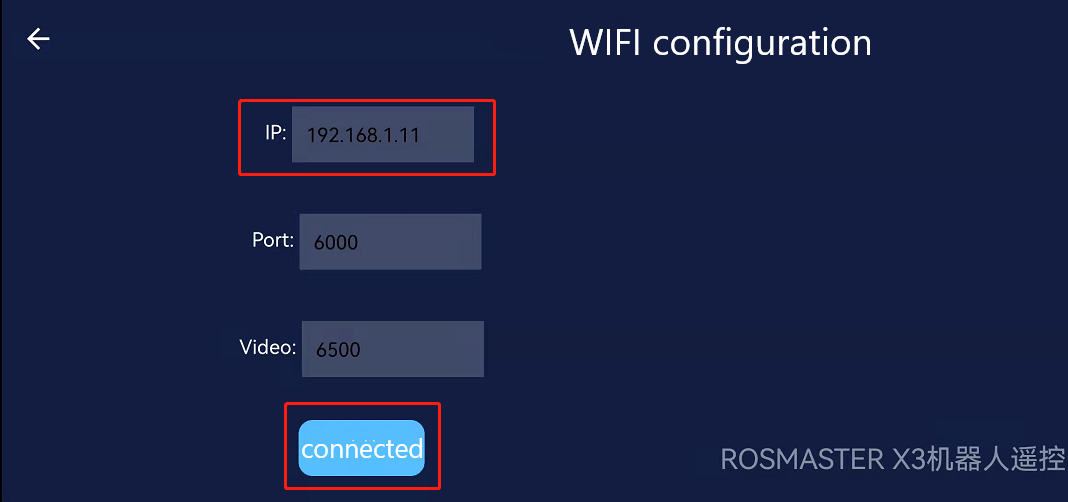
Note: Before connecting the device, please make sure the mobile phone is connected to the ROSMASTER hotspot signal, or the mobile phone and the ROSMASTER cart are connected to the same router. And the app big programme has been started (factory system default boot start app big programme).
1.3. APP Function Introduction
The main interface of Rosmaster's APP is divided into three modules in total, and each module corresponds to different functions.
1.3.1 Remote Control
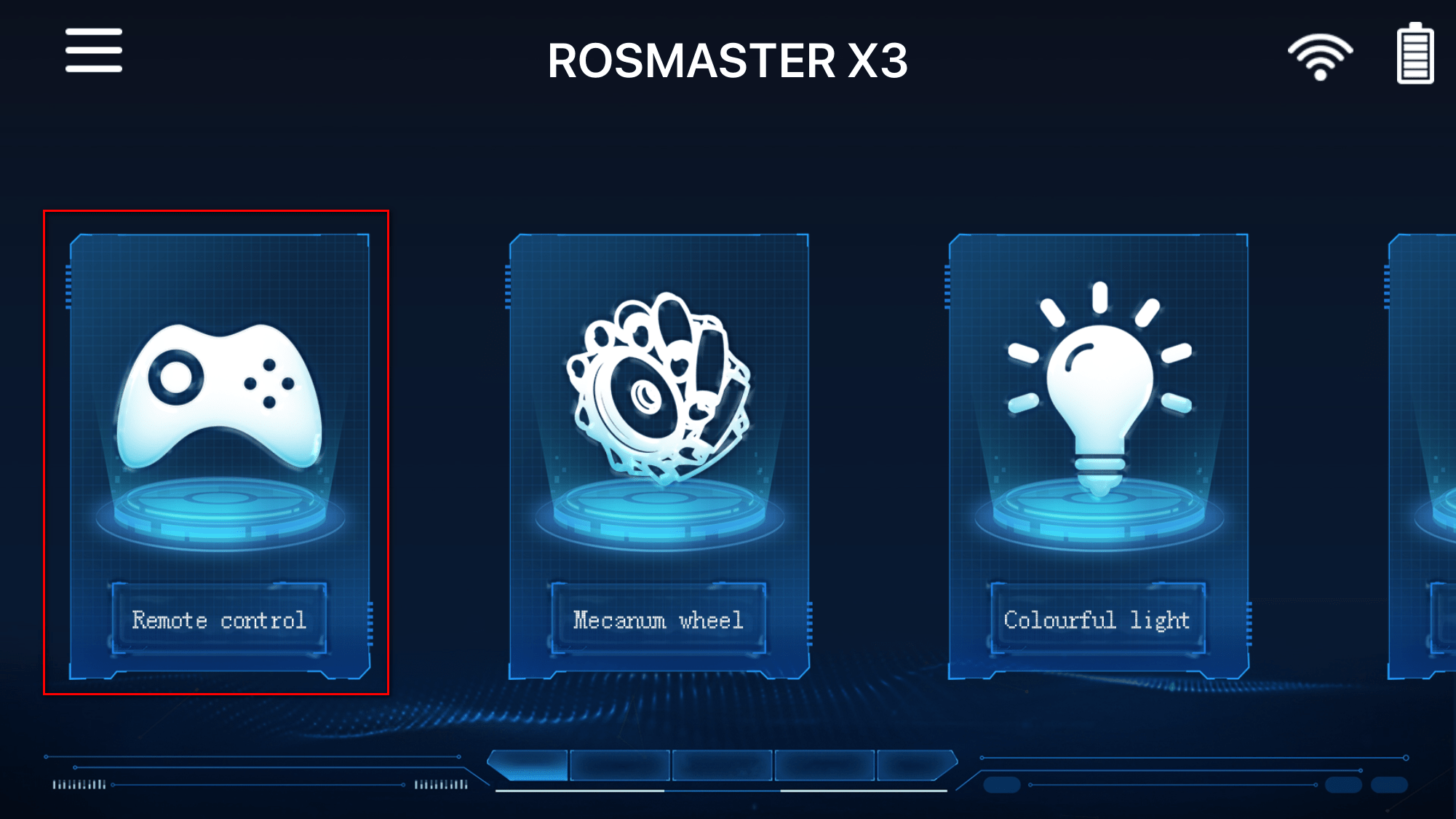
Click the [Remote Control] icon in the main interface and the following screen will appear.
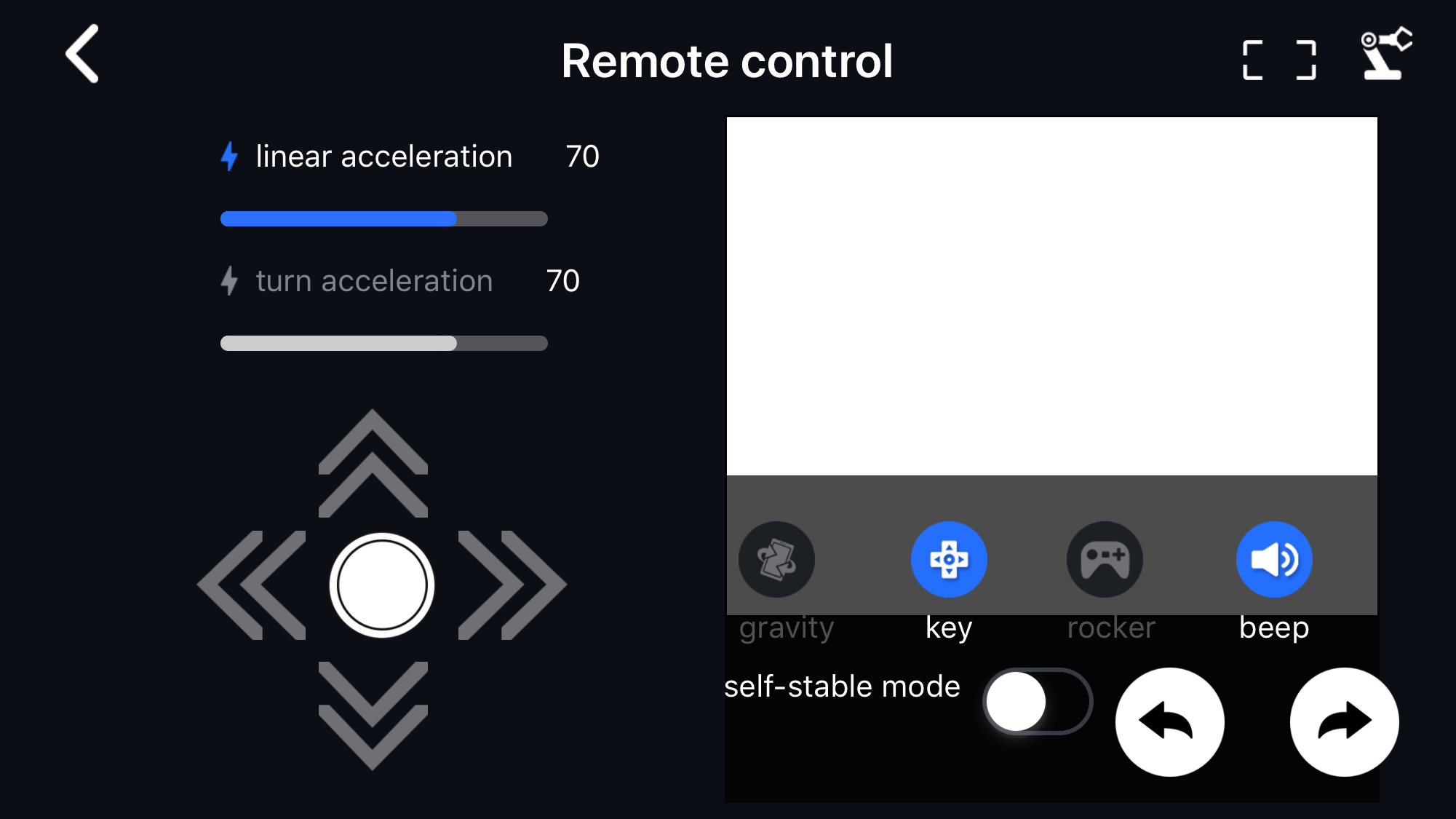
Part 1. Controls on the left side: The upper part allows you to adjust the speed of the robot in a straight line and turn, while the lower part allows you to control the robot to go forward and backward, left and right, and stop.
Part 2. Camera screen in the middle: you can see the front view of Rosmaster, and the screen can be zoomed in/out. The top left corner of the screen shows the current frame rate of the camera.
Part 3. Right upper button control: you can choose three control methods, including gravity sensing, button control, joystick control, the last button can be pressed to control the buzzer to sound the horn, release the hand buzzer off. For the robot arm version, you can click the robot arm icon to open the robot arm control interface.
Part 4. Self-stabilising mode: turn on the self-stabilising mode, when the car receives the command to stop, it will brake and stop immediately, turn off the self-stabilising mode, when the car receives the command to stop, it will glide freely and stop.
Part 5. The two buttons on the bottom right side control the left and right rotation of the robot.
1.3.2 McNamee
Click the [McNamee] icon on the main screen and the following screen will appear. (This section is exclusive to McNamee wheel models)
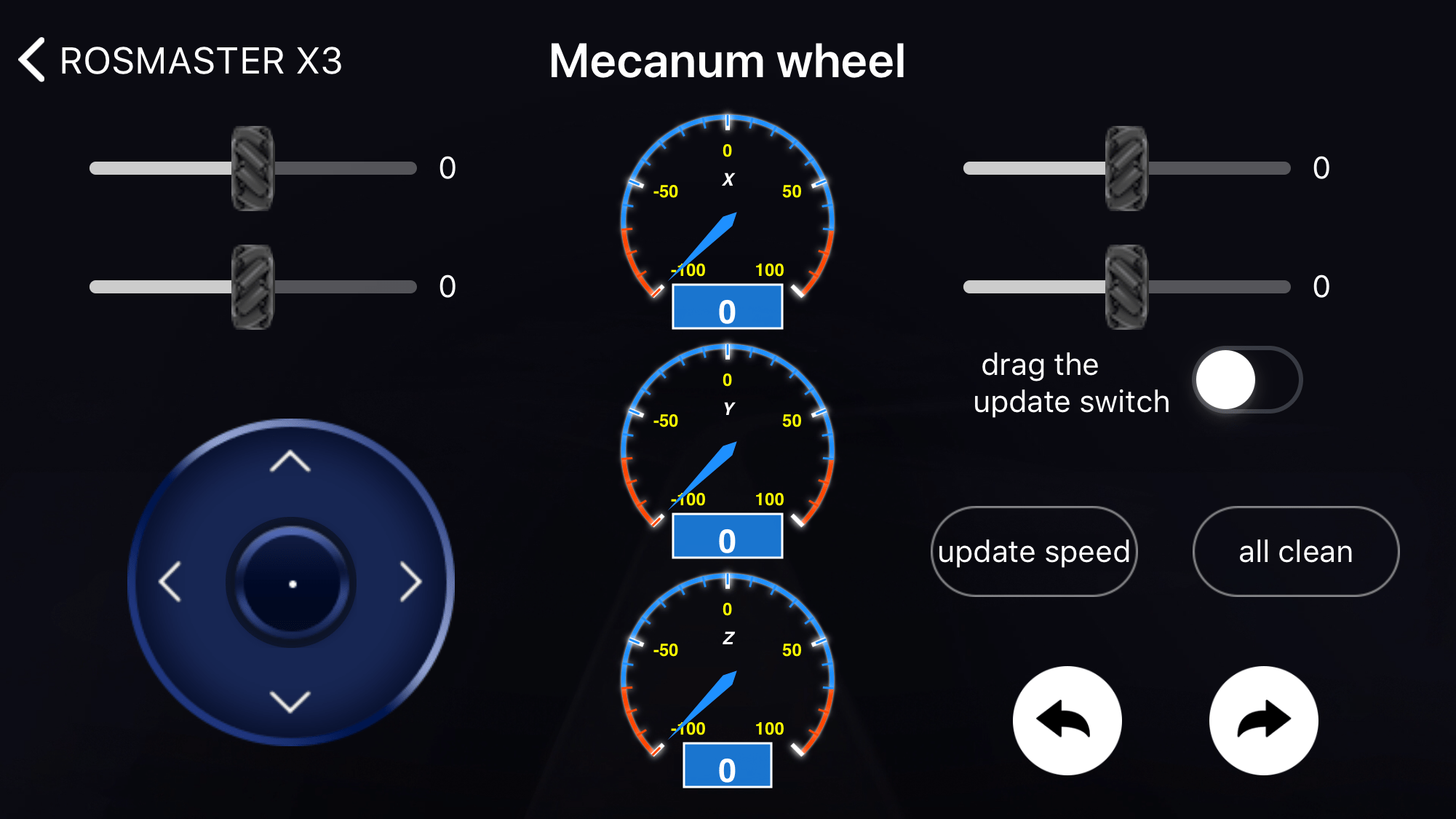
Four sliding rod represents the robot's four wheels, the middle of the stop, slide the wheel to the left to reverse, slide the wheel to the right to positively rotate, slide, select [update speed], the robot will update the speed, the wheel will rotate, open the [drag to update the switch], slide the rod to immediately update the speed of the robot's wheels, click on the [all zero], the robot stops the action, it is recommended to test the test pad up the robot first, to determine that there is no error in the Put it on the ground to see if it is the way you want to move. The bottom two white buttons are for controlling the robot to rotate left and right.
Middle dial (from top to bottom):
- X: X-axis speed; 2. Y: Y-axis speed; 3. Z: Z-axis speed.
1.3.3. Dazzle Lights
Click the [Dazzling Lights] icon in the main interface and the following screen will appear.
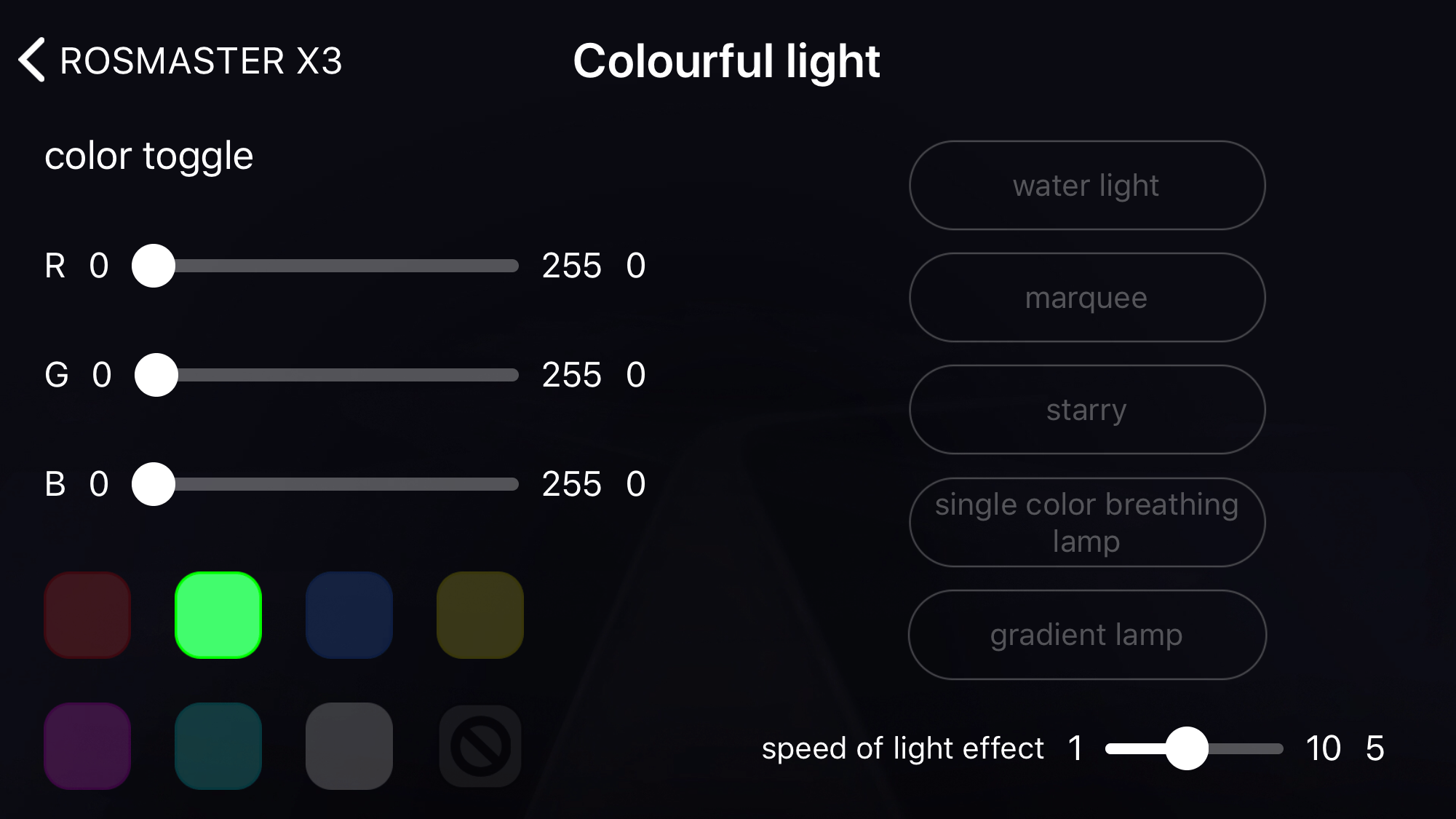
The Rosmaster lights are divided into three parts in total.
Part 1. Upper left part 【Colour Switch】: This function can modify the RGB colour of the light bar in real time, directly dragging the drag bar of 【R】【G】【B】, you can see the RGB light bar on the rear of the Rosmaster changing in real time with cool light effects.
Part 2. Bottom left [Fixed Colour Switching]: This function allows the RGB light bar to display red, green, blue, yellow, purple, cyan, white and off. You can also adjust the colour of the monochrome breathing light.
Part 3. Right [Cool FX]: Each time you click a button, it will show a specific special effect, there are running lights, running lights, starlight dots, monochrome breathing light, gradient light function, click the change button again to exit the special effect; the drag bar underneath can change the speed of the lighting effect, the default is 5, the fastest is 1, the slowest is 10.
1.3. 4 use guidelines

This part of the function is for the robot arm to adjust the centre position, according to the APP guide to complete the operation can be. This function is not required for the version without robotic arm.