3、Robot control
1、Program function description
Open the chassis, run the handle/keyboard control program, you can control the trolley movement through the handle or keyboard, and the handle also controls the buzzer, controls the light strip and other functions.
2、Program code reference path
After entering the docker container, the location of the source code of the controller control function is located, taking the X3 model as an example
/root/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_ctrl/yahboomcar_ctrl/yahboom_joy_X3.pyAfter entering the docker container, the location of the source code of the keyboard control function is located at,
xxxxxxxxxx/root/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_ctrl/yahboomcar_ctrl/yahboom_keyboard.py3、The program starts
xxxxxxxxxx#The underlying driverros2 run yahboomcar_bringup Mcnamu_driver_X3#Handle controlros2 run yahboomcar_ctrl yahboom_joy_X3ros2 run joy joy_node#Keyboard controlros2 run yahboomcar_ctrl yahboom_keyboardIt should be noted here that the controller and the keyboard cannot run at the same time, because after the keyboard control is started, when the keyboard is not pressed, the default is to send a message with 0 data of speed.
3.1、Controller control
After turning on, press the "START" button, hear the buzzer sound, and you can start the remote control. The remote control will enter sleep mode after being turned on for a period of time, and you need to press the "START" button to end sleep. If you want to control the trolley running, you also need to press the R2 key and release the motion control lock before you can use the joystick to control the trolley movement.
Remote control effect description,
| handle | effect |
|---|---|
| Left stick up/down | Go straight forward/backward |
| Left stick left/right | Go straight left/right |
| Right stick left/right | Rotate left/rotate right |
| The right "1" key | Control the strip light effect |
| The right "2" key | Unlock/lock motion control |
| "START" button | Control the buzzer/end hibernation |
| The left stick is pressed | Adjust the speed of the X/Y axis |
| The right stick is pressed | Adjust the angular velocity magnitude |
3.2、keyboard control
Key description,
Direction control
| 【i】or【I】 | 【linear,0】 | 【u】or【U】 | 【linear,angular】 |
|---|---|---|---|
| 【,】 | 【-linear,0】 | 【o】or【O】 | 【linear,-angular】 |
| 【j】or【J】 | 【0,angular】 | 【m】or【M】 | 【-linear,-angular】 |
| 【l】or【L】 | 【0,-angular】 | 【.】 | 【-linear,angular】 |
Speed control
| Key | Speed changes | Key | Speed changes |
|---|---|---|---|
| 【q】 | 10% increase in both linear and angular velocities | 【z】 | 10% reduction in both linear and angular velocities |
| 【w】 | Only 10% increase in line speed | 【x】 | Only 10% reduction in line speed |
| 【e】 | Only 10% increase in angular velocity | 【c】 | Only 10% reduction in angular velocity |
| 【t】 | Linear speed X/Y direction switching | 【s】 | Stop keyboard control |
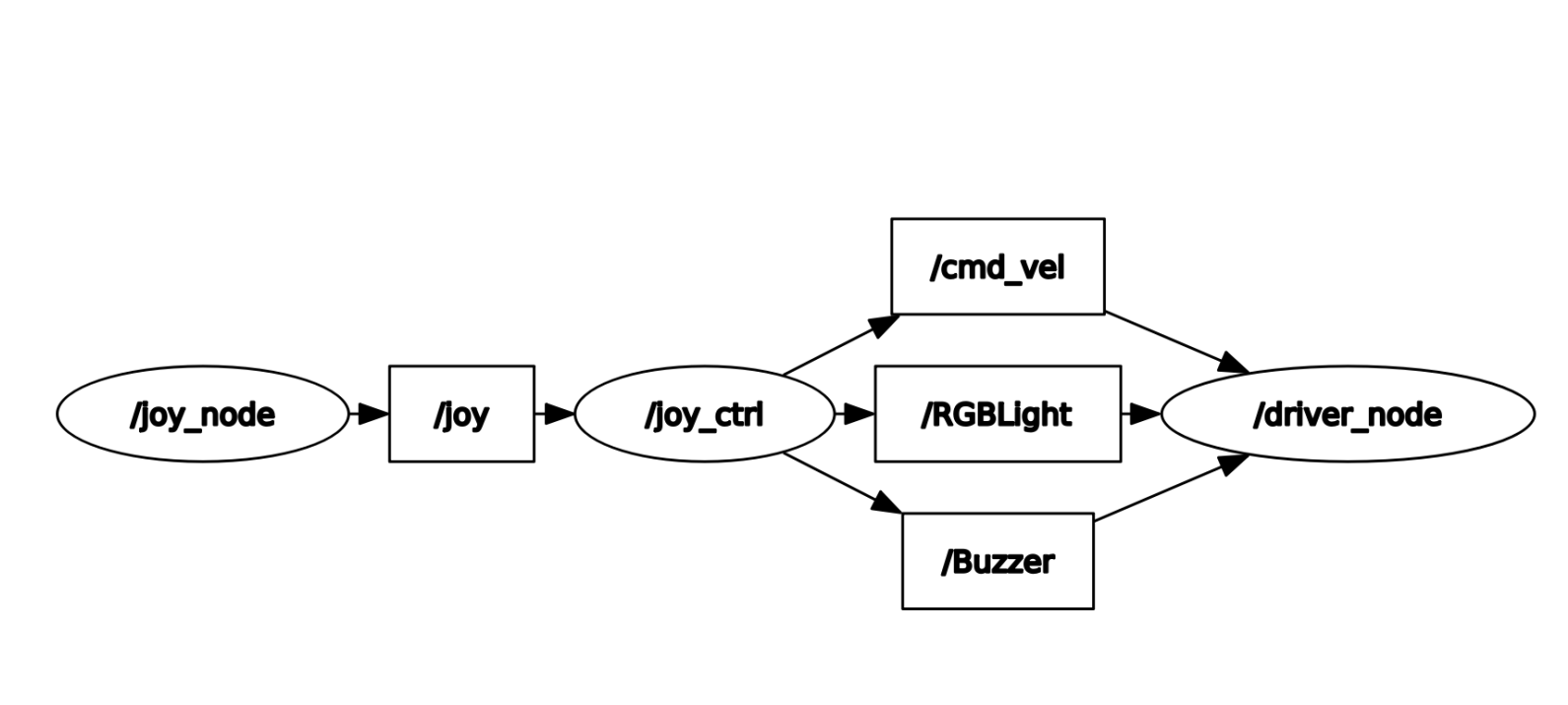
3.3、node communication
Handle control trolley node communication diagram,
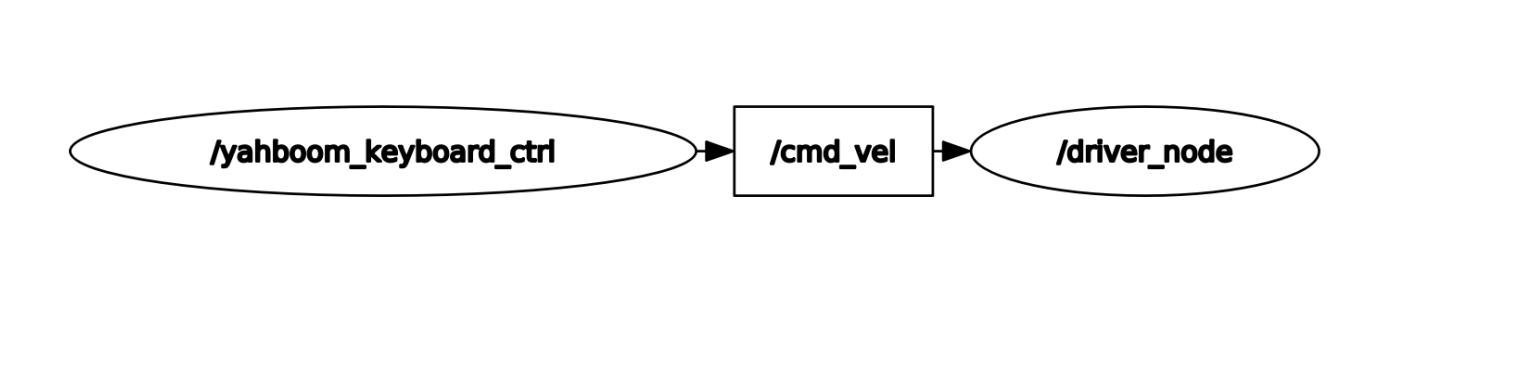
Keyboard control trolley node communication diagram,
4、core code parsing
4.1、Controller control code
Taking the X3 model as an example, we said in the previous lesson that the chassis control program is the Mcnamu_driver_X3.py, defining three subscribers: speed (/cmd_vel), light strip effect (/RGBLight), and buzzer (/buzzer), so we can control speed, light strip and buzzer as long as we publish this type of topic data yahboom_joy_X3.py the controller control code program.
xxxxxxxxxx#create pubself.pub_goal = self.create_publisher(GoalID,"move_base/cancel",10)self.pub_cmdVel = self.create_publisher(Twist,'cmd_vel', 10)self.pub_Buzzer = self.create_publisher(Bool,"Buzzer", 1)self.pub_RGBLight = self.create_publisher(Int32,"RGBLight" , 10)self.pub_JoyState = self.create_publisher(Bool,"JoyState", 10)
In addition, we need to subscribe to the "joy" topic data, which tells us that the keys (joysticks and keys) have changed, that is,
xxxxxxxxxx#create subself.sub_Joy = self.create_subscription(Joy,'joy', self.buttonCallback,10)
The main look is the callback function of this joy topic, which parses the received value, then assigns the value to the publisher's variable, and finally publishes it.
xxxxxxxxxxdef buttonCallback(self,joy_data):if not isinstance(joy_data, Joy): returnif self.user_name == "root": self.user_jetson(joy_data)else: self.user_pc(joy_data)
The function jumps here are self.user_jetson, and the parameter variable passed in is the topic received,
xxxxxxxxxxdef user_jetson(self, joy_data):
Take the control buzzer as an example for analysis,
xxxxxxxxxxif joy_data.buttons[11] == 1:Buzzer_ctrl = Bool()self.Buzzer_active=not self.Buzzer_activeBuzzer_ctrl.data =self.Buzzer_activefor i in range(3): self.pub_Buzzer.publish(Buzzer_ctrl)
It is judged here that if it is joy_data.buttons[11] == 1, that is, if "start" is pressed, then the value of the buzzer will change, and then publish self.pub_Buzzer.publish(Buzzer_ctrl). In other cases, the principle is the same, they are all assigned by detecting the change of the key value. Refer to yahboom_joy_X3.py for detailed code.
4.2、keyboard control code
The keyboard control can only control the movement control of the trolley, not the light strip and buzzer of the trolley, therefore, there is only one / cmd_vel speed publisher,
xxxxxxxxxxself.pub = self.create_publisher(Twist,'cmd_vel',1)
The program also defines two dictionaries to detect the change of the letters of the keyboard when pressed,
xmoveBindings = { 'i': (1, 0), 'o': (1, -1), 'j': (0, 1), 'l': (0, -1), 'u': (1, 1), ',': (-1, 0), '.': (-1, 1), 'm': (-1, -1), 'I': (1, 0), 'O': (1, -1), 'J': (0, 1), 'L': (0, -1), 'U': (1, 1), 'M': (-1, -1),}
speedBindings = { 'Q': (1.1, 1.1), 'Z': (.9, .9), 'W': (1.1, 1), 'X': (.9, 1), 'E': (1, 1.1), 'C': (1, .9), 'q': (1.1, 1.1), 'z': (.9, .9), 'w': (1.1, 1), 'x': (.9, 1), 'e': (1, 1.1), 'c': (1, .9),}Entering the while loop, the program will read the value pressed by the keyboard, and then make judgments layer by layer.
xxxxxxxxxxkey = yahboom_keyboard.getKey()if key=="t" or key == "T": xspeed_switch = not xspeed_switchelif key == "s" or key == "S":...if key in moveBindings.keys():...elif key in speedBindings.keys():..Finally, according to the judgment of multiple layers, assign values to twist.linear.x, twist.linear.y, twist.angular.z and then publish.
xxxxxxxxxxif xspeed_switch: twist.linear.x = speed * xelse: twist.linear.y = speed * xtwist.angular.z = turn * thif not stop: yahboom_keyboard.pub.publish(twist)if stop:yahboom_keyboard.pub.publish(Twist())Refer to yahboom_keyboard.py for detailed code.
Precautions for Handle Use
When connecting the USB joystick receiver, it is recommended to connect it to the outermost USB-HUB expansion board, not directly to the motherboard or the middle USB-HUB expansion board (X3plus). If it is directly connected to the motherboard or the middle USB-HUB expansion board (X3plus), it will seriously interfere with the joystick signal reception due to the aluminium alloy grill on the top and bottom.
After plugging and unplugging the joystick receiver head, it is necessary to restart the joystick programme, otherwise it will not be able to control the trolley.
After starting the joystick control programme, if the joystick can not control the trolley, it may be caused by the incorrect control mode of the joystick, you can long press the joystick mode button for about 15 seconds to switch the mode, and when the green indicator light is always on, then press the start button again, if the buzzer sounds, it means that the switching is successful, if there is no response, you can long press the joystick mode button again for 15 seconds.
Jetson series support mode: PC/PCS mode. In PC mode, the POWER MODE indicator light is red by default. You can connect the handle receiver to the usb port of the computer to connect to the wireless handle. Enter the URL in the browser: https://gamepad-tester.com/. Pressing the button URL will display the change of the button value, as shown in the following figure:

Raspberry Pi series support mode: X-BOX mode. In X-BOX mode, the default POWER MODE indicator light is green. You can connect the handle receiver to the usb port of the computer to connect to the wireless handle. Enter the URL in the browser: https://gamepad-tester.com/. Pressing the button URL will display the change of the button value, as shown in the following figure:


After re-plugging the joystick receiver or rebooting the motherboard, the joystick will reset to factory mode, and if it is not controllable, the mode will need to be re-switched each time it is plugged in or rebooted.
In the case of unsuccessful matching, the POWER MODE indicator light will flash red and green all the time, and will not light up after a few seconds of sleep.