3. ROS2 Topics Newsletter
Topic communication is one of the most frequently used communication methods in ROS2. Topic communication is based on the publish-subscribe model, where there is a publisher who publishes data on a specified topic, and a subscriber who subscribes to the topic can receive the data as long as it is subscribed to the topic. The next step is to explain how to use Python language to achieve topic communication between nodes.
1. Create a new workspace
Terminal input.
mkdir -p ros2_ws/srccd ros2_ws/src
ros2_ws is the name of the workspace and src is the directory where the feature package is stored.
2. New function package
Terminal input,
xxxxxxxxxxcd ~/ros2_ws/srcros2 pkg create --build-type ament_python topic_pkg
Switching to the topic_pkg folder, there are the following files and folders, the python program we wrote is placed in the topic_pkg folder in that directory, i.e. , the
xxxxxxxxxx~/ros2_ws/src/topic_pkg/topic_pkg
3. Write publisher python file
3.1 Programme source code
Create a new file named publisher_demo.py.
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkg/topic_pkggedit publisher_demo.py
Copy the following section into the file.
xxxxxxxxxximport rclpyfrom rclpy.node import Nodefrom std_msgs.msg import Stringclass Topic_Pub(Node): def __init__(self,name): super().__init__(name) self.pub = self.create_publisher(String,"/topic_demo",1) self.timer = self.create_timer(1,self.pub_msg) def pub_msg(self): msg = String() msg.data = "Hi,I send a message." self.pub.publish(msg) def main(): rclpy.init() pub_demo = Topic_Pub("publisher_node") rclpy.spin(pub_demo)Here is the idea of modularity is used to implement, this approach is good for us to port and modify the code. First of all, a class is defined, the class name is Topic_Pub, there are two parts, one is init, the other is pub_msg. init is the initialisation of the class itself, pub_msg is the method of the class, that is to say, as long as we create the object of the class, we can use the variables and methods inside.
xxxxxxxxxx#导入rclpy库# Import the rclpy libraryimport rclpyfrom rclpy.node import Node#导入String字符串消息# Import String messagesfrom std_msgs.msg import String #创建一个继承于Node基类的Topic_Pub节点子类 传入一个参数name# Create a subclass of Topic_Pub node that inherits from the Node base class Pass in a parameter namedef __init__(self,name): super().__init__(name) #创建一个发布者,使用create_publisher的函数,传入的参数分别是: #话题数据类型、话题名称、保存消息的队列长度 #Create a publisher, using the function create_publisher, the parameters passed in are: #Topic data type, topic name, length of the queue to save messages in self.pub = self.create_publisher(String,"/topic_demo",1) #创建一个定时器,间隔1s进入中断处理函数,传入的参数分别是: #中断函数执行的间隔时间,中断处理函数 # Create a timer that enters the interrupt handler function at 1s intervals, the parameters passed in are: #interrupt function execution interval, interrupt handling function self.timer = self.create_timer(1,self.pub_msg)#定义中断处理函数# Define interrupt handler functionsdef pub_msg(self): msg = String() #创建一个String类型的变量msg # Create a variable msg of type String msg.data = "Hi,I send a message." #给msg里边的data赋值# Assign a value to the data in the msg. self.pub.publish(msg) #发布话题数据#Publishing topic data #主函数#main functiondef main(): rclpy.init() #初始化 # Initialisation pub_demo = Topic_Pub("publisher_node") #创建Topic_Pub类对象,传入的参数就是节点的名字 # Create an object of class Topic_Pub, the incoming parameter is the name of the node rclpy.spin(pub_demo) #执行rclpy.spin函数,里边传入一个参数,参数是刚才创建好的Topic_Pub类对象 #Execute the rclpy.spin function, which passes in a parameter to the Topic_Pub class object you just created. 3.2 Modifying the setup.py file
Terminal input.
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkggedit setup.py
Find the location shown below.
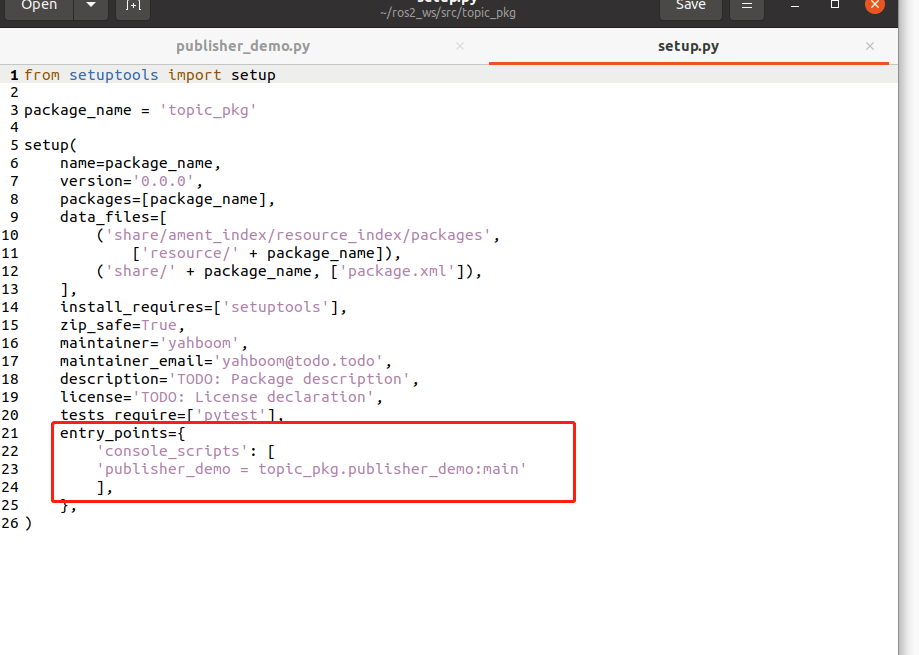
Inside 'console_scripts': [] add the following, in the format of

The name of the executable file is customised by us, that is, we need to execute which program when we ros2 run, the name of the function package is the function package where your python file is located, followed by the name of the python file, and the main at the end is the entry point of the program execution. As long as the program is written in python format and compiled to generate an executable file, you need to add it here according to the above format.
3.3 Compilation Workspace
xxxxxxxxxxcd ~/ros2_wscolcon build
Compile successfully and add the workspace to the system environment variable by entering the following command.
xxxxxxxxxxecho "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc
Then, reopen the terminal or refresh the environment variables to take effect.
xxxxxxxxxxsource ./.bashrc
3.4. Run the programme
Terminal input.
xxxxxxxxxxros2 run topic_pkg publisher_demo
Program successfully run is not printed anything, we can ros2 topic tool to see the data, first of all, first check this whether there is a topic published, terminal input, the
xxxxxxxxxxros2 topic list

This topic_demo is the topic data defined in the program, next, we use ros2 topic echo to print this data, terminal input.
xxxxxxxxxxros2 topic echo /topic_demo
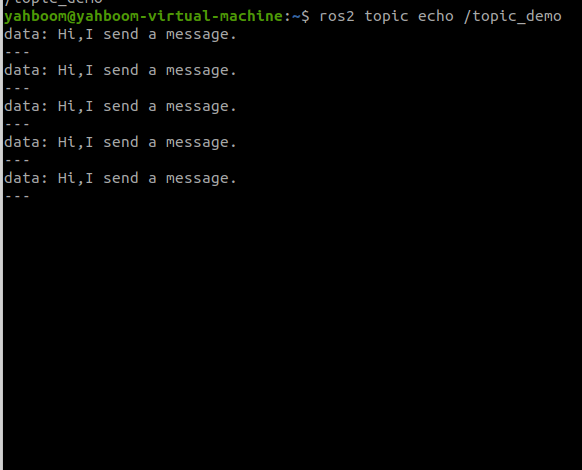
As you can see, the "Hi,I send a message." printed in the terminal matches the msg.data = "Hi,I send a message." in our code.
4. Write subscriber python file
4.1 Program source code
Create a new file named subscriber_demo.py.
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkg/topic_pkggedit subscriber_demo.py
Copy the following section into the file.
x#导入相关的库#Import related librariesimport rclpyfrom rclpy.node import Nodefrom std_msgs.msg import Stringclass Topic_Sub(Node): def __init__(self,name): super().__init__(name) #创建订阅者使用的是create_subscription,传入的参数分别是:话题数据类型,话题名称,回调函数名称,队列长度 # Create subscribers using create_subscription, the parameters passed in are: topic data type, topic name, callback function name, queue length self.sub = self.create_subscription(String,"/topic_demo",self.sub_callback,1) #回调函数执行程序:打印接收的到信息 # Callback function executes the procedure: prints the incoming message. def sub_callback(self,msg): print(msg.data)def main(): rclpy.init() #ROS2 Python接口初始化 #ROS2 Python interface initialisation sub_demo = Topic_Sub("subscriber_node") # 创建对象并进行初始化 # Create and initialise objects rclpy.spin(sub_demo)4.2 Modifying the setup.py file
Terminal input.
xxxxxxxxxxcd ~/ros2_ws/src/topic_pkggedit setup.py
Find the location shown below.
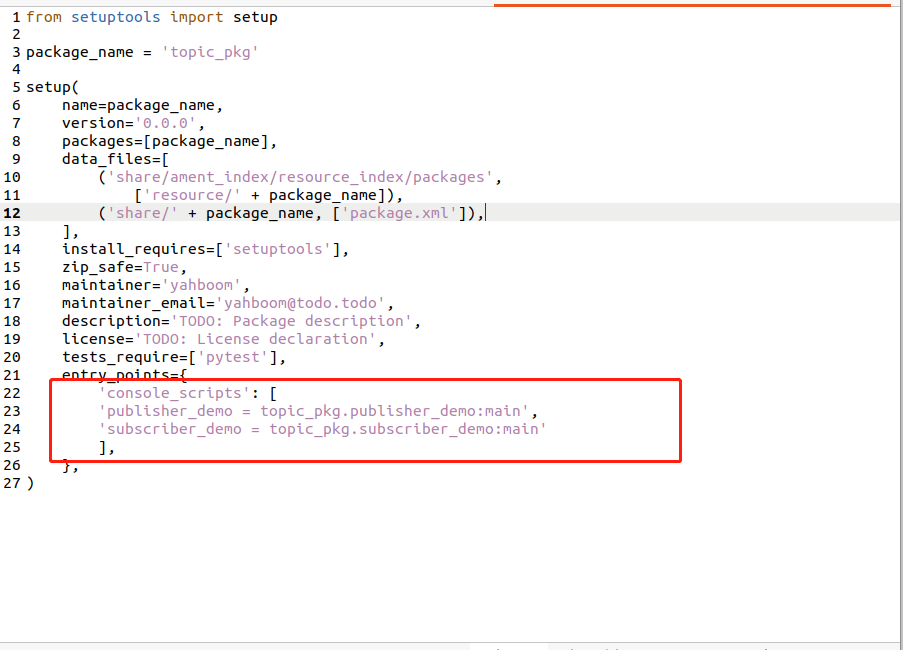
Inside 'console_scripts': [] add the following, in the format of
xxxxxxxxxx'subscriber_demo = topic_pkg.subscriber_demo:main'

4.3. Compilation workspace
xxxxxxxxxxcd ~/ros2_wscolcon build
After compiling, refresh the workspace environment variables.
xxxxxxxxxxsource ~/ros2_ws/install/setup.bash
4.4. Run the programme
Terminal input.
xxxxxxxxxx#启动发布者节点# Launch publisher nodesros2 run topic_pkg publisher_demo #启动订阅者节点#Start subscriber nodesros2 run topic_pkg subscriber_demo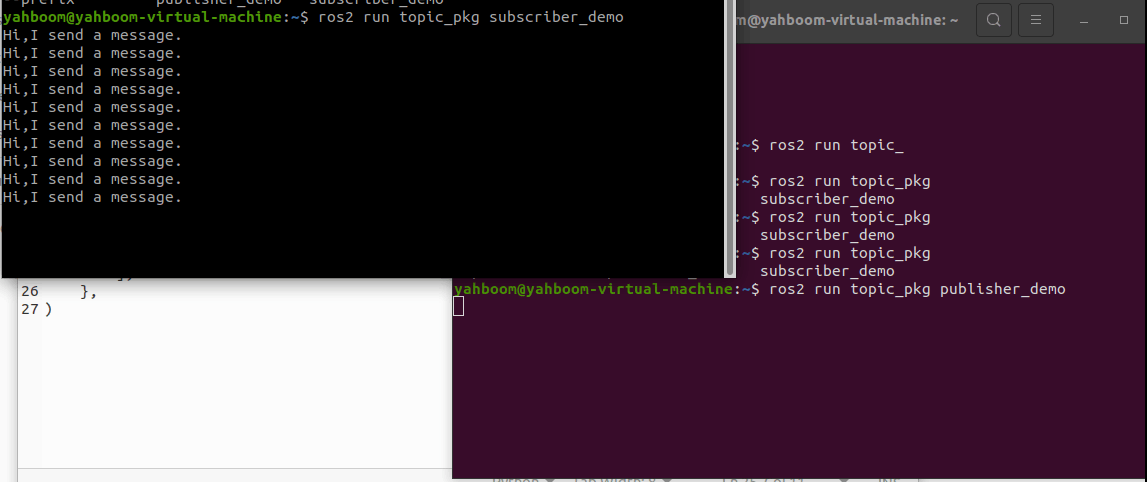
As shown above, the terminal running the subscriber at this point prints the information about /topic_demo posted by the publisher.
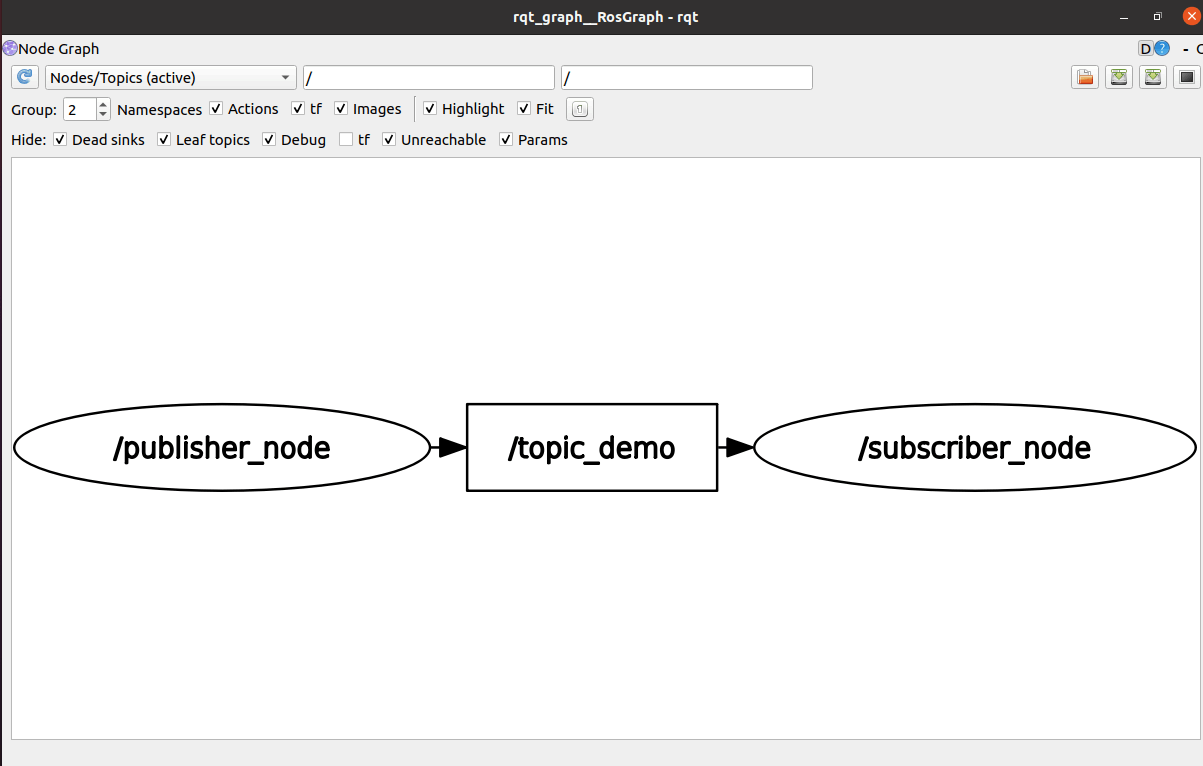
The topic communication between the two nodes can be viewed with the following command.
xxxxxxxxxxros2 run rqt_graph rqt_graph
5. Summary
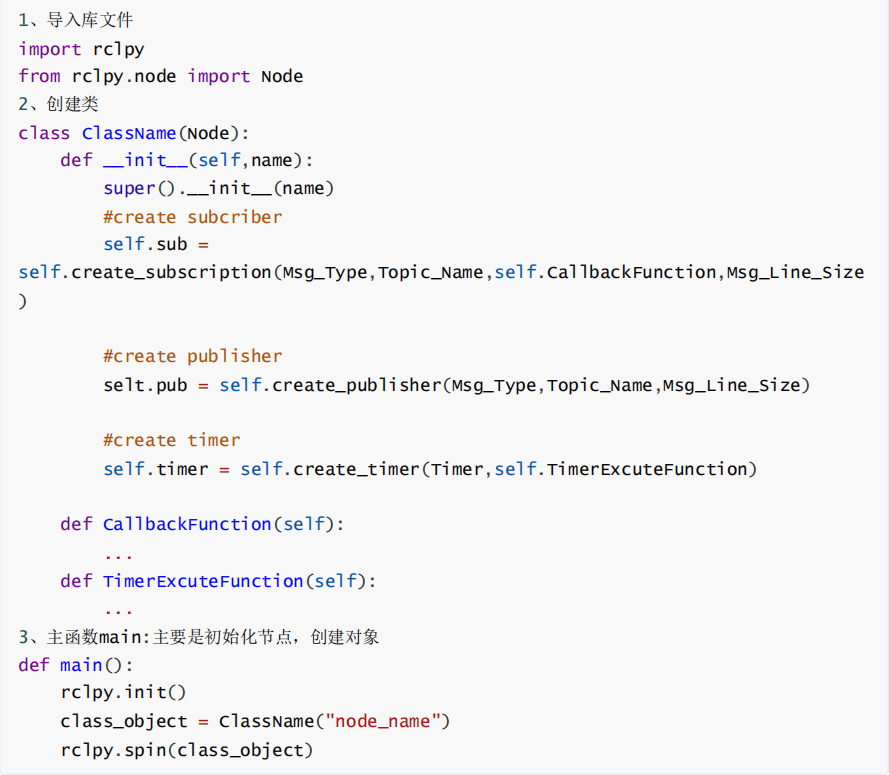
5.1 python framework for writing topic communication programmes
5.2 Modifying the contents of the setup.py file
To write a node program using python, you need to modify the setup.py file, refer to the above content and add to generate your own node program.