Introduction and use of lidar
1. Program function description
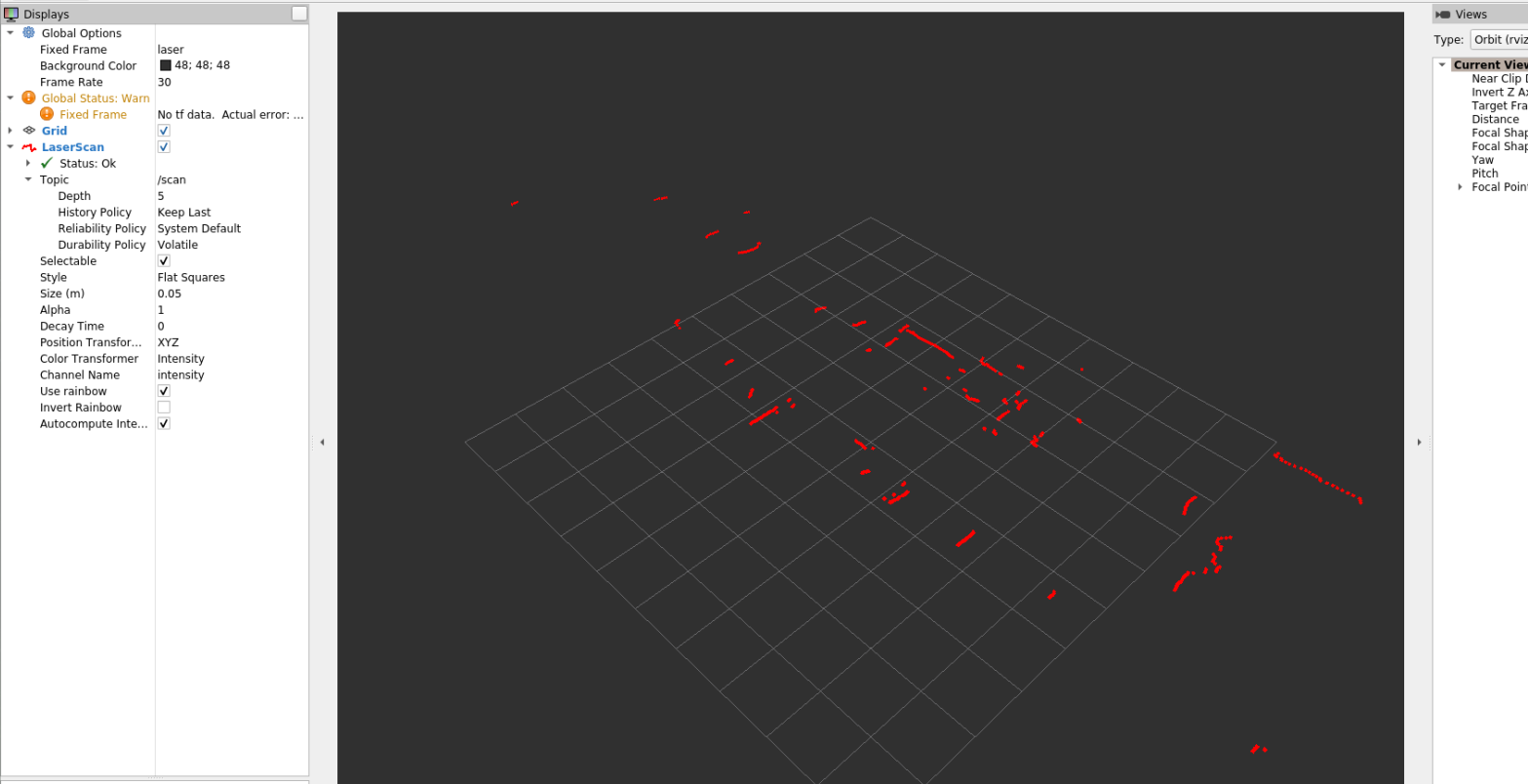
After the program runs, drive the LIDAR, turn on the lidar scanning data, visualise the data scanned by the LIDAR in rviz.
2. Program code reference path
The location of the source code for this function is located at.
cd ~/cartographer_ws2source install/setup.bash#MS200雷达#MS200 lidar/home/pi/cartographer_ws2/src/olidar_lidar/launch/ms200_scan.launch.py#MS200雷达可视化#MS200 lidar visualisation/home/pi/cartographer_ws2/src/olidar_lidar/launch/ms200_scan_view.launch.py3. Programme start
Since the lidar chassis is already booting up and self-starting, to start the lidar separately, please stop the self-starting service first and enter the command in the terminal:
xxxxxxxxxxsudo systemctl stop XgoStart.service
xxxxxxxxxx#启动MS200雷达# Activate MS200 lidarros2 launch olidar_lidar ms200_scan.launch.py#启动MS200雷达+rviz可视化数据#Start MS200 lidar + rviz visualisation dataros2 launch olidar_lidar ms200_scan_view.launch.pyScreenshot of the run, for example starting "MS200 lidar + Visualisation".
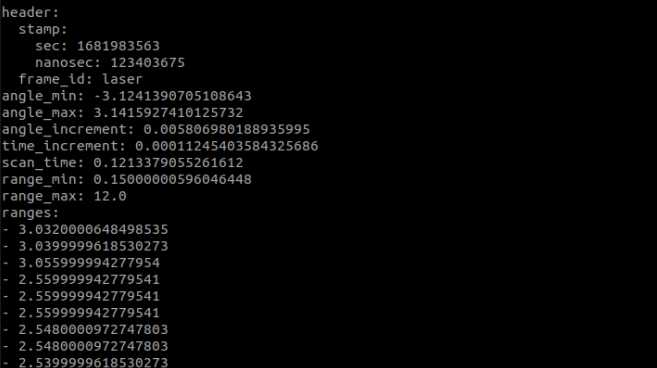
The data from the lidar scan can be printed with the following command,
xxxxxxxxxxros2 topic echo /scan
4. Introduction to Silan lidar
4.1 Overview
Single-line Lidar refers to the lidar where the beam emitted from the laser source is a single line, which is divided into triangulation and TOF Lidar, and is mainly used in the robotics
It is mainly used in the field of robotics. Its scanning speed is fast, strong resolution, high reliability, compared with multi-line Lidar, single-line Lidar in the angular frequency and
Sensitivity of single-line LIDAR is faster, so it is more accurate in the distance and accuracy of obstacle ranging.
4.2. Ranging Principle
A1 lidar uses triangulation method and S2 lidar uses TOF method.
Triangulation
The laser triangulation method mainly uses a laser beam to irradiate the target at a certain angle of incidence, the laser light reflects and scatters on the surface of the target, and the laser light is transmitted to the target at another angle using a transmission beam.
Laser reflection and scattering on the surface of the target, in another angle using a lens on the reflected laser convergence imaging, spot imaging in the CCD (Charge-coupled Device, photocoupled) position sensor.
The spot is imaged on the CCD (Charge-coupled Device) position sensor. When the object under test moves along the laser direction, the spot on the position sensor will move, and its displacement will correspond to the moving distance of the object.
The displacement of the spot corresponds to the distance of the measured object, so the distance between the measured object and the baseline can be calculated from the spot displacement distance by algorithm design.
Since the incident and reflected light form a triangle, the calculation of the spot displacement applies the geometric triangle theorem, so the measurement method is called laser
Triangulation.
TOF Ranging
TOF LIDAR is based on measuring the time of flight of light to obtain the distance to a target. The principle of operation is that a modulated laser signal is emitted by a laser transmitter.
The laser transmitter sends out a modulated laser signal, which is reflected by the object to be measured and then received by the laser detector, by measuring the phase difference between the transmitted laser and the received laser, the distance can be calculated.
By measuring the phase difference between the transmitted laser light and the received laser light, the distance to the target can be calculated.
4.3. Baud rate used
The baud rate of A1 lidar is 115200, and the baud rate of S2 lidar is 1000000.
4.4. Differences between various LIDAR models
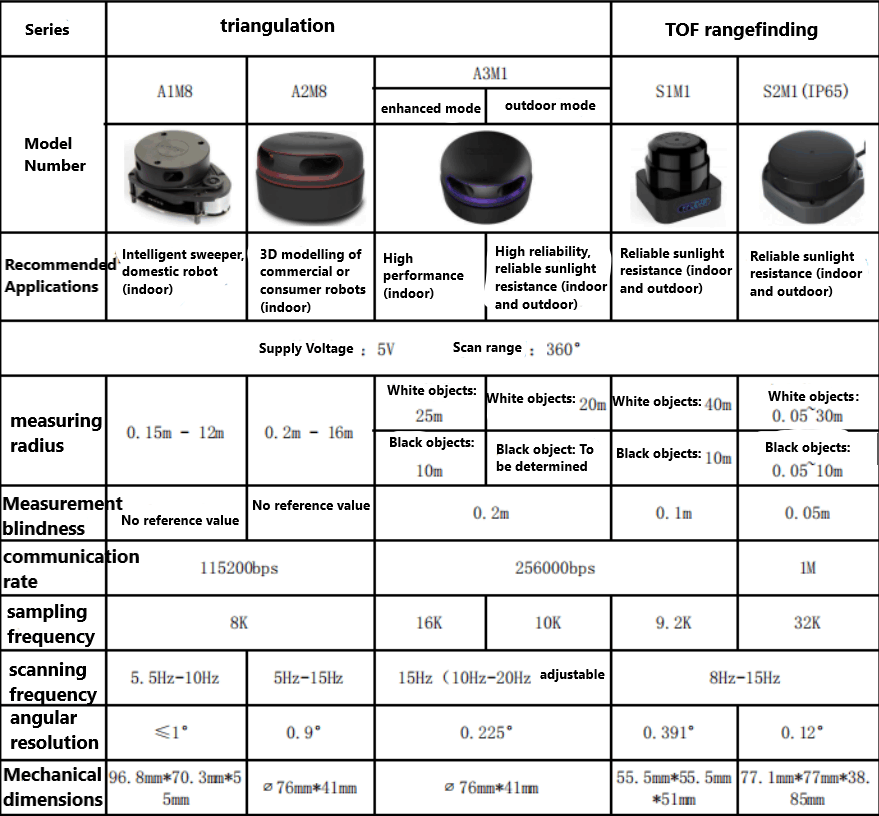
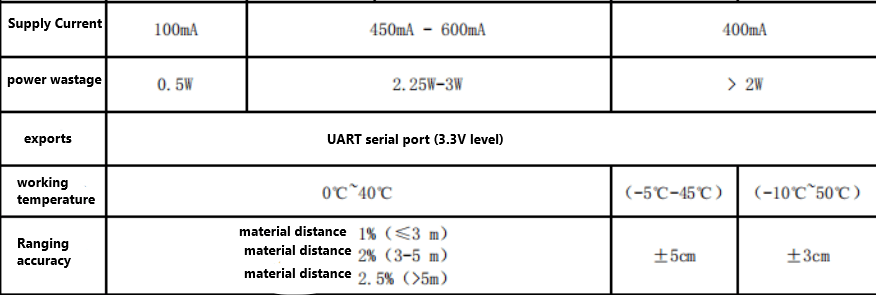
From the above figure, it can be seen that parameters such as measurement radius, sampling speed, scanning frequency and angular resolution are important indicators of the lidar's operational performance.
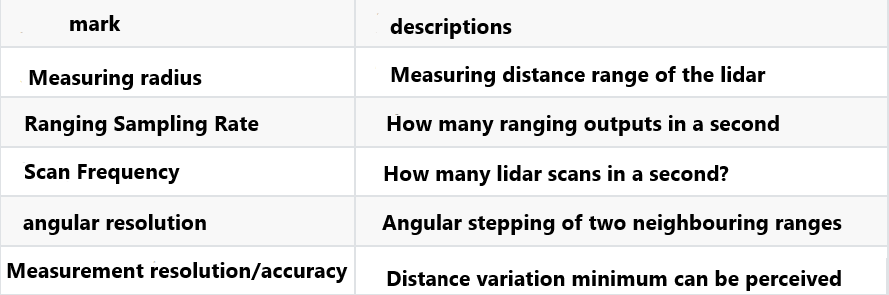
A higher scanning frequency ensures that the LIDAR-mounted robot achieves faster speeds and guarantees the quality of the map construction. But to Increase the scanning frequency is not simply a matter of accelerating the rotation of the scanning motors inside the LiDAR, but corresponds to an increase in the ranging sampling rate. Otherwise, when the sampling rate is fixed, a faster scanning speed will only reduce the angular resolution. In addition to the range and scanning frequency, parameters such as measurement resolution and map building accuracy are also important. In addition to the range and scanning frequency, parameters such as measurement resolution and map building accuracy are also important for Lidar performance, and these are the most important parameters to ensure the stability of the robot. These parameters are important for the stability of the robot.