STM32 car autopilot
STM32 car autopilot1.Experiment preparation2.Car wiring2.1 Stm32 and dual driver board wiring part2.2 Wiring of STM32F103RCT6 and infrared sensor2.3 Wiring of STM32RCT6 and k2103.Main source code analysis4.Experimental results5.Notes about this routine
1.Experiment preparation
- knowledge reserve
- Have good programming ability (mainly C language)
- Familiar with the architecture of stm32
- Material preparation
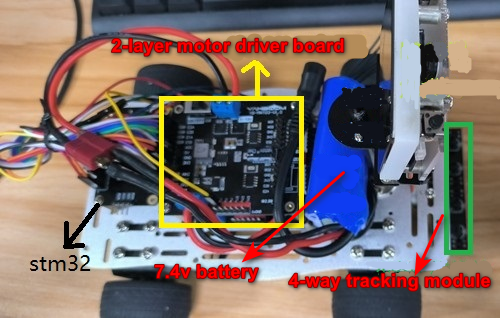
- Smart car mini chassis *1
- stm32F103RCT6 *1
- Yahboom's dual motor driver board *2 (Other motor driver boards may not be suitable for the source code provided in this tutorial, you need to transplant it yourself)
- Four-way tracking module *1
- 310 motor*4
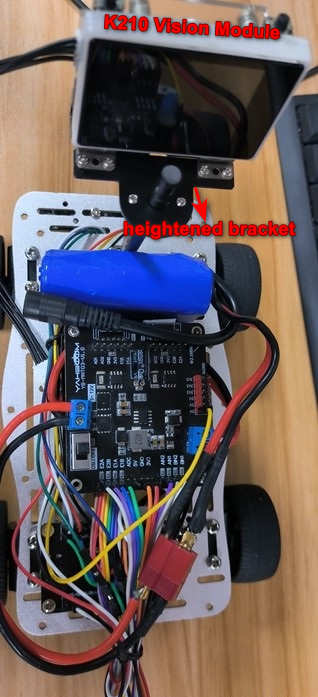
- k210 viewing angle module *1
- K210 angle of view module heightened bracket *1
- 7.4V battery *1
- Several DuPont lines
- M3 copper pillars, several M3 screws
- k210 viewing angle module preparation 3.1 Take the TF card out of the k210 vision module and insert it into the card reader.

3.2 Insert the card reader into the computer and wait for the computer to recognize the U disk
3.3 After the computer recognizes it, enter it into the TF card.

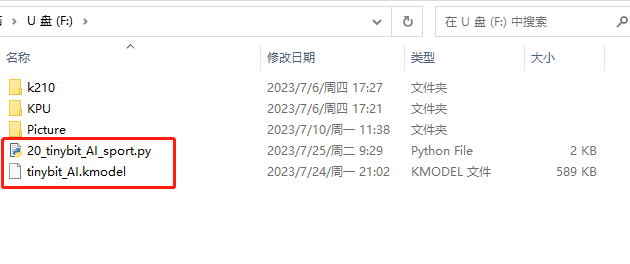
3.4 Find the k210 folder in the source code of the data program, find the 20_tinybit_AI_sport.py and tinybit_AI.kmodel files from the folder, and copy them to the root directory.

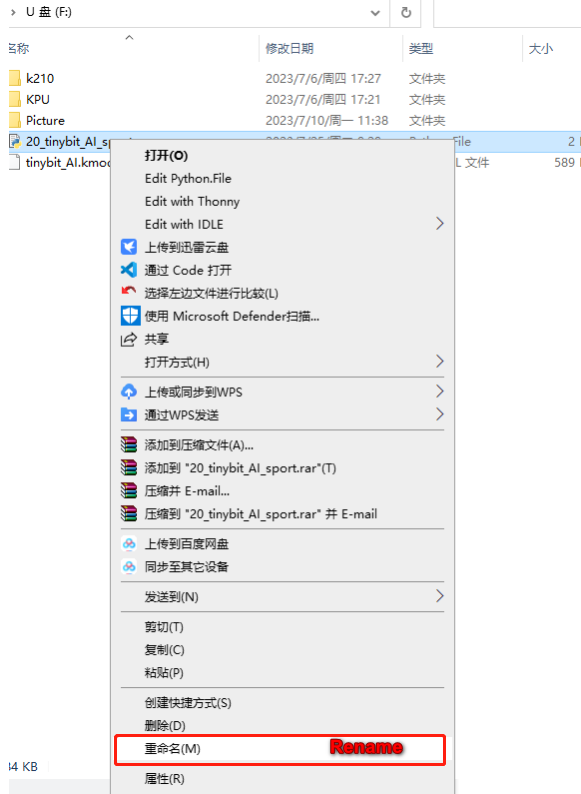
3.5 Delete the main file and rename the 20_tinybit_AI_sport.py file to the main file.
3.6 After renaming, pull out the card reader, take out the TF card, and insert it back into the k210 vision module.
2.Car wiring
After the car is assembled, as shown in the figure below
2.1 Stm32 and dual driver board wiring part
- Wiring of stm32F103RCT6 and dual motor board (top board)
| STM32RCT6 | The top 2-channel motor board |
|---|---|
| PA11 | BN1 |
| PA8 | BN2 |
| PC6 | AN1 |
| PC7 | AN2 |
| 3.3 | 3V3 |
| GND | GND |
| PA0 | E2A |
| PA1 | E2B |
| PA15 | E1A |
| PB3 | E1B |
- Wiring of stm32F103RCT6 and dual motor board (lowest board)
| STM32RCT6 | The bottom 2-channel motor board |
|---|---|
| PB0 | BN1 |
| PB1 | BN2 |
| PC8 | AN1 |
| PC9 | AN2 |
| 3.3 | 3V3 |
| GND | GND |
| PA7 | E2A |
| PA6 | E2B |
| PB7 | E1A |
| PB6 | E1B |
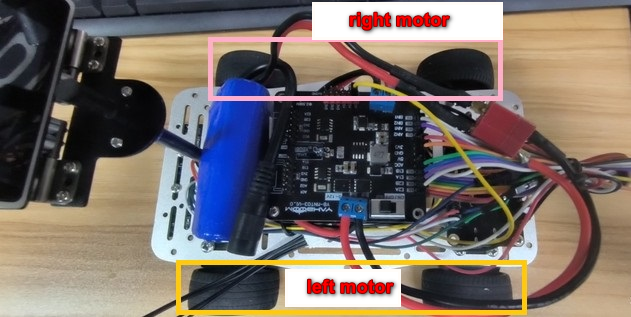
The motor drive board on the top layer is the motor of the two wheels (that is, the front motor) that is connected to the electromagnetic sensor,
motorA--->right motor、motorB--->left motor
The motor drive board at the bottom is connected to the two-wheeled motors away from the electromagnetic sensor (that is, the motor at the back),
motorA--->right motor、motorB--->left motor
2.2 Wiring of STM32F103RCT6 and infrared sensor
| STM32RCT6 | 4-way line inspection sensor |
|---|---|
| PA5 | S1 |
| PA4 | S2 |
| PA3 | S3 |
| PA2 | S4 |
| 3.3V | VCC |
| GND | GND |
2.3 Wiring of STM32RCT6 and k210
| STM32RCT6 | k210 |
|---|---|
| PA9 | RXD |
| PA10 | TXD |
| VCC | VCC |
| GND | GND |
3.Main source code analysis
int main(void){ //A series of initialization work... while(1) { switch(id_num_back) { case red_light: Motion_Set_Pwm(0,0,0,0);//car stop set_dataid(MAX_id);//back to normal patrol break; case green_light: set_dataid(MAX_id);//back to normal patrol break; case school: case walk: set_dataid(MAX_id);//back to normal patrol break; case right: Road_sign_right();//Right turn priority line patrol break; case left: Road_sign_left();//Left turn priority line patrol break; case freeSpeed: set_dataid(MAX_id);//back to normal patrol break; case limitSpeed: Road_sign_speedlimit();//low speed line patrol break; case chuku_track_line://Line patrol after leaving the warehouse car_outbound_track(); break; case one: case two: case horn: break; default: Track_line();//Call the normal line following function } } //...}- After booting, stm32 waits for 7 seconds to wait for the k210 module to enter the working state normally
- Track_line: This function is a normal line patrol movement. If no road signs are recognized, this function is usually called for movement.
- Reverse_parking_no1: This is the process of driving the car back to No. 1 parking garage when k210 recognizes the number 1
- Car_outbound : This is to successfully drive into the No. 1 parking garage, stop for 2 seconds, then drive out of the garage, and then perform line inspection after exiting the garage
- Road_sign_left: After k210 recognizes the road sign for turning left, it will perform the processing of line inspection for turning left
- Reverse_parking_no2: This is when the k210 recognizes the number 2, the process of driving the car back into the No. 2 garage
- Car_outbound_track: This is the processing of line inspection after leaving the garage, and it will return to normal line inspection after a period of time.
- Road_sign_right: After the k210 recognizes the right-turn road sign, it will perform the processing of right-turn priority line inspection
- Road_sign_speedlimit: Recognize the speed limit sign, drive the car into the speed limit movement
- set_dataid: This function is to directly set the state of the car.
The flow chart of the program is roughly as follows
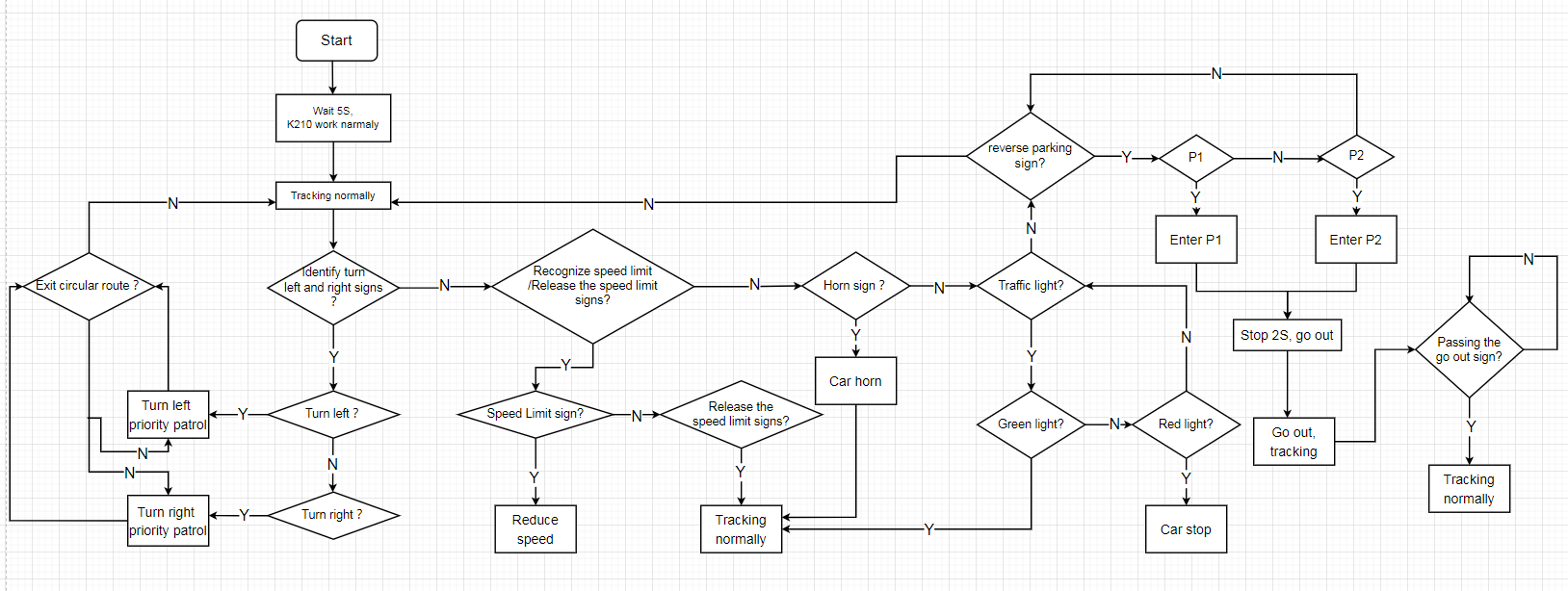
The source code provided in this tutorial retains the RGB\LCD\IMU\external Flash driver on the STM32F103RCT6 board, which can be called directly to facilitate secondary development
4.Experimental results
After everything is normal, the car will start along the map and plan the path of the tracking movement. When the road sign is recognized, the corresponding path planning movement will appear.
- When the speed limit sign is recognized, the car will do a speed patrol movement that does not exceed the speed limit sign

- When the speed limit sign is recognized, the car will return to the normal line patrol movement.

- When a left/right turn is recognized, the car will make a priority left/right turn patrol movement


- The horn is recognized, because this car does not have a buzzer, so it is normal to patrol the line.

- Recognize traffic lights, red lights will stop, green lights will continue to move forward.

- Identify No. 1 and No. 2 garages, the car will enter No. 1 garage if it recognizes No. 1 garage; recognize No. 2 garage, and the car will reverse into No. 2 garage; 2 seconds after entering the garage, the car will come out and continue to patrol the line.


5.Notes about this routine
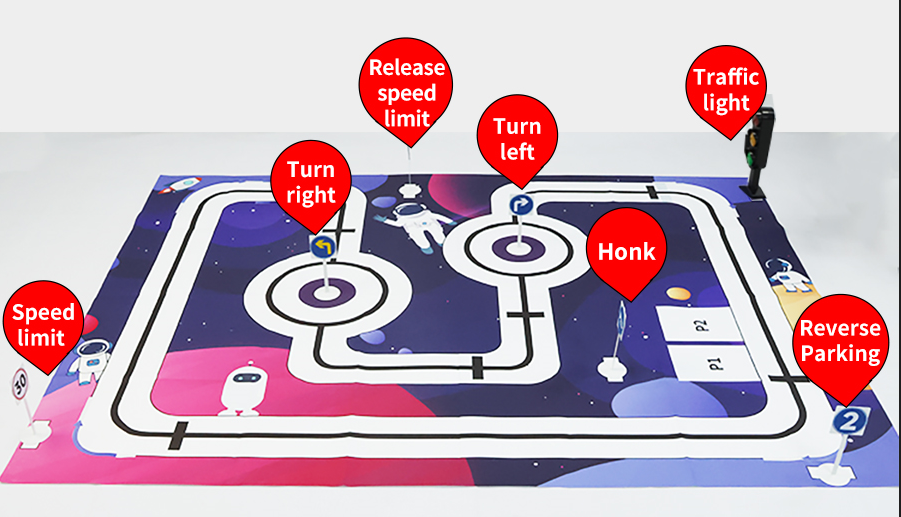
- The signposts placed on this tutorial map are shown in the figure below:
The battery must be fully charged, otherwise it cannot work normally
If the road signs cannot be recognized, you can adjust the bracket of the k210 or the distance of the road signs
You must use the road sign model provided by us, refer to the pictures in the road sign folder, other road signs cannot be recognized
Under normal circumstances, the motor is very smooth. If there is a motor jam or a large resistance, these conditions indicate that there is a problem with the motor.
- The patrol map must be kept clean without too many stains, otherwise it will affect the normal use
When patrolling the line, the environment should not be too bright or too dark, normal lighting is fine