4.Hardware interaction data processing
4.Hardware interaction data processing4.1、Hardware mounting (port binding)4.2、GUI display in docker4.3、docker containers and hosts transfer files to each other4.3.1、use cp command4.3.1.1、Copy files from the container to the host4.3.1.2、Copy files from the host to the container4.3.2、Using Data Volumes4.3.2.1、Data Volume Overview4.3.2.2、Data volume use
4.1、Hardware mounting (port binding)
1、Connect the device you need to mount to the board,Create udev rules in the host (/etc/udev/rules.d/)
The following is the ROS control board and Radar equipment mounting as an example, the actual situation according to their own equipment mounting
2、Then, when opening the container, mount the devices with rules set on the rules into the docker container through parameters such as --device=/dev/myserial --device=/dev/rplidar
docker run -it --device=/dev/myserial --device=/dev/rplidar ubuntu:latest /bin/bash
3、The device can be found in the docker container
xjetson@ubuntu:~$ docker imagesREPOSITORY TAG IMAGE ID CREATED SIZEubuntu 1.0 78ca7be949b6 About an hour ago 69.2MBpengan88/ubuntu 1.0 78ca7be949b6 About an hour ago 69.2MBhello-world latest 46331d942d63 13 months ago 9.14kBjetson@ubuntu:~$ ll /dev | grep ttyUSB*lrwxrwxrwx 1 root root 7 Apr 23 18:07 myserial -> ttyUSB0lrwxrwxrwx 1 root root 7 Apr 23 18:07 rplidar -> ttyUSB1crwxrwxrwx 1 root dialout 188, 0 Apr 23 18:07 ttyUSB0crwxrwxrwx 1 root dialout 188, 1 Apr 23 18:07 ttyUSB1jetson@ubuntu:~$ docker run -it --device=/dev/myserial --device=/dev/rplidar ubuntu:latest /bin/bashroot@03522257ba30:/# ls /dev #There are myserial and rplidar device in dockerconsole fd full mqueue myserial null ptmx pts random rplidar shm stderr stdin stdout tty urandom zero
4.2、GUI display in docker
1、Install in the host (Factory image has been installed by default):
xxxxxxxxxxsudo apt-get install tigervnc-standalone-server tigervnc-viewersudo apt-get install x11-xserver-utils
2、Execute in the host: xhost +
After the following image is displayed, perform 3 steps:

3、Execute the command in the host to enter the container:
xxxxxxxxxxdocker run -it \ # Run docker images interactively--env="DISPLAY" \ # Open the display GUI interface--env="QT_X11_NO_MITSHM=1" \ # Port 1 of X11 is used for display-v /tmp/.X11-unix:/tmp/.X11-unix \ # map shows the service node directoryyahboomtechnology/ros-foxy:1.0.0 # The name of the image to start/bin/bash # Executes the /bin/bash command in the container
4、Test
xxxxxxxxxxExecute in container:rviz2
4.3、docker containers and hosts transfer files to each other
4.3.1、use cp command
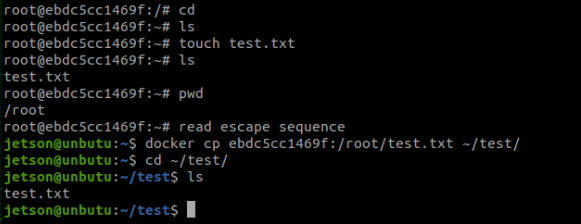
4.3.1.1、Copy files from the container to the host
xxxxxxxxxx# commanddocker cp [container id:Intra-container path] [Destination host path]# test# Execute inside the container, create a file testjetson@ubuntu:~$ docker ps -aCONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMESc54bf9efae47 ubuntu:latest "/bin/bash" 2 hours ago Up 9 minutes funny_hugle3b9c01839579 hello-world "/hello" 3 hours ago Exited (0) 3 hours ago jovial_brownjetson@ubuntu:~$ docker attach c5root@c54bf9efae47:/# cdroot@c54bf9efae47:~# lsroot@c54bf9efae47:~# touch test.txtroot@c54bf9efae47:~# lstest.txtroot@c54bf9efae47:~# pwd/rootroot@c54bf9efae47:/# (read escape sequence) #ctrl+P+Q The container does not stop exitingjetson@ubuntu:~$ docker cp c54bf9efae47:/root/test.txt ~/jetson@ubuntu:~$ ls # The test .txt file has been copied inDesktop Documents Downloads fishros Music openvino Pictures Public rootOnNVMe run_docker.sh sensors snap temp Templates test.txt Videos
example:
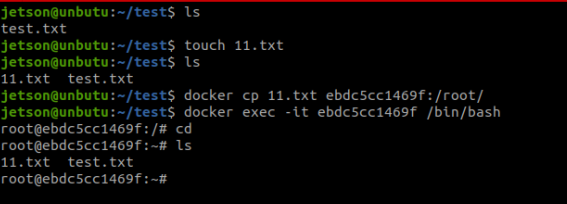
4.3.1.2、Copy files from the host to the container
xxxxxxxxxx# commanddocker cp [host_file_path] [container id:the path within the docker]# testjetson@ubuntu:~$ docker ps -aCONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMESc54bf9efae47 ubuntu:latest "/bin/bash" 2 hours ago Up 5 minutes funny_hugle3b9c01839579 hello-world "/hello" 3 hours ago Exited (0) 3 hours ago jovial_brownjetson@ubuntu:~$ lsDesktop Documents Downloads fishros Music openvino Pictures Public rootOnNVMe run_docker.sh sensors snap temp Templates test.txt Videosjetson@ubuntu:~$ touch 11.txtjetson@ubuntu:~$ ls11.txt Desktop Documents Downloads fishros Music openvino Pictures Public rootOnNVMe run_docker.sh sensors snap temp Templates test.txt Videosjetson@ubuntu:~$ docker cp 11.txt c54bf9efae47:/root/jetson@ubuntu:~$ docker exec -it c54b /bin/bashroot@c54bf9efae47:/# lsbin boot dev etc home lib media mnt opt proc root run sbin srv sys tmp usr varroot@c54bf9efae47:/# cd /root/root@c54bf9efae47:~# ls # 11.txt The file has been copied in11.txt test.txt
example:
4.3.2、Using Data Volumes
4.3.2.1、Data Volume Overview
Package the application and the running environment to form a container to run, and the run can be accompanied by the container, but our data requirements are expected to be persistent! For example, if you install a mysql and you delete the container, it is equivalent to deleting the library and running away, which is definitely not okay! So we hope that it is possible to share data between containers, and the data generated by docker containers, if a new image is not generated through docker commit, so that the data is saved as part of the image, then when the container is deleted, the data will naturally be gone! This will not work!
In order to save data, we can use volumes in Docker! Let the data be mounted locally to us! So that the data is not lost due to container deletion!
Peculiarity:
- Data volumes can share or reuse data between containers
- Changes in the volume can take effect directly
- Changes in the data volume will not be included in the update of the image
- The lifecycle of a data volume lasts until no container uses it
4.3.2.2、Data volume use
xxxxxxxxxx# commanddocker run -it -v host absolute path directory: directory inside the container image name# Testdocker run -it -v /home/jetson/temp:/root/temp yahboomtechnology/ros-foxy:3.4.0 /bin/bashThe /home/jetson/temp directory in the host and the /root/temp directory in the container can share data