9.cartographer mapping algorithm
9.cartographer mapping algorithm9.1 Introduction 9.2 Use 9.2.1 Start 9.2.2 Control the robot 9.2.3 Map save 9.2.4 Node View 9.2.5 View tf tree 9.3 configuration parameters
Cartographer: https://google-cartographer.readthedocs.io/en/latest/
Cartographer ROS: https://google-cartographer-ros.readthedocs.io/en/latest/
map_server: https://wiki.ros.org/map_server
9.1 Introduction
Cartographer is a 2D and 3D SLAM(simultaneous localization and mapping) library supported by Google's open source ROS system. Graphing algorithm based on graph optimization(multi-threaded backend optimization, problem optimization built by cere). Data from multiple sensors, such as LIDAR, IMU, and cameras, can be combined to simultaneously calculate the sensor's position and map the environment around the sensor.
The source code of cartographer mainly includes three parts: cartographer, cartographer_ros and ceres-solver(back-end optimization).
 cartographer
cartographer
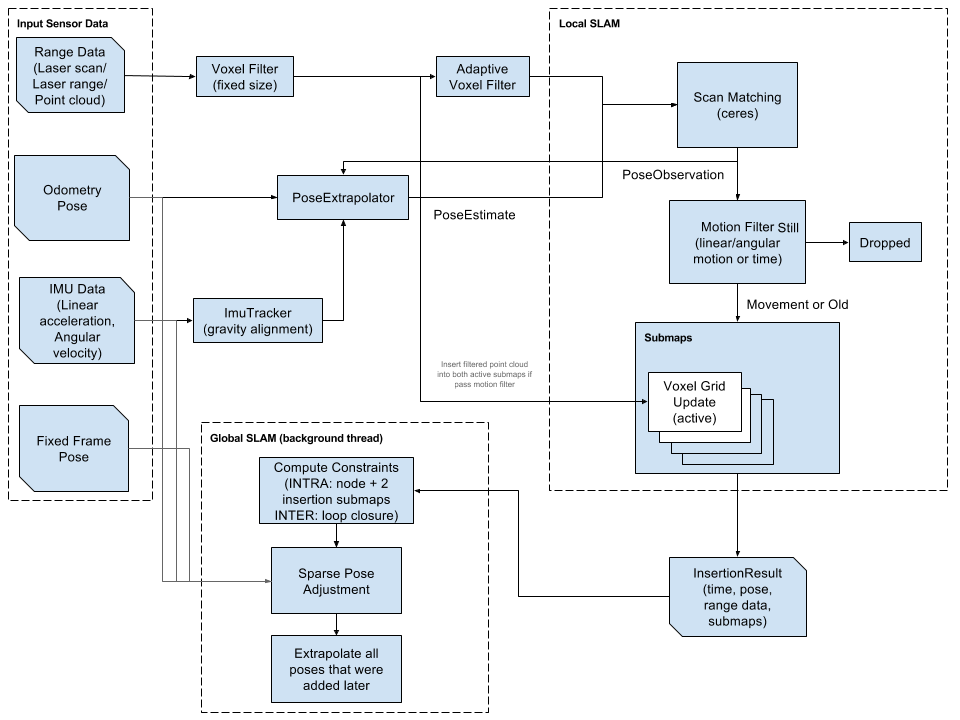
Cartographer uses the mainstream SLAM framework, which is a three-stage method of feature extraction, closed-loop detection, and back-end optimization. A submap submap is composed of a certain number of LaserScans, and a series of submap submaps constitute the global map. The short-term process of building submaps with LaserScan has little cumulative error, but the long-term process of building global maps with submaps will have large cumulative errors, so it is necessary to use closed-loop detection to correct the positions of these submaps. The basic unit of closed-loop detection is Submap, closed loop detection adopts scan_match strategy. The focus of cartographer is the creation of submap submaps that fuse multi-sensor data(odometry, IMU, LaserScan, etc.) and the implementation of the scan_match strategy for closed-loop detection.
- cartographer_ros
The cartographer_ros package runs under ROS. It can receive various sensor data in the form of ROS messages, and publish it in the form of messages after processing, which is convenient for debugging and visualization.
9.2 Use
Note: When building a map, the slower the speed, the better the effect(note that if the rotation speed is slower), the effect will be poor if the speed is too fast.
According to different models, you only need to set the purchased model in [.bashrc], X1(ordinary four-wheel drive) X3(Mike wheel) X3plus(Mike wheel mechanical arm) R2(Ackerman differential) and so on. Section takes X3 as an example
Open the [.bashrc] file
sudo vim .bashrc
Find the [ROBOT_TYPE] parameter and modify the corresponding model
xxxxxxxxxxexport ROBOT_TYPE=X3 # ROBOT_TYPE: X1 X3 X3plus R2 X7
To replace the configuration file, copy the launch file and lua file required by cartographer to the specified directory. It has been configured before leaving the factory.
xxxxxxxxxxsudo bash ~/yahboomcar_ws/src/yahboomcar_nav/scripts/copy_carto.sh
9.2.1 Start
Start command(robot side), for the convenience of operation, this section takes [mono + laser + yahboomcar] as an example.
xxxxxxxxxxroslaunch yahboomcar_nav laser_bringup.launch # laser + yahboomcar roslaunch yahboomcar_nav laser_usb_bringup.launch # mono + laser + yahboomcar roslaunch yahboomcar_nav laser_astrapro_bringup.launch # Astra + laser + yahboomcar Mapping command(robot side)
xxxxxxxxxxroslaunch yahboomcar_nav yahboomcar_map.launch use_rviz:=false map_type:=cartographer - [use_rviz] parameter: whether to enable rviz visualization.
- [map_type] parameter: set the mapping algorithm [cartographer].
Open the visual interface(virtual machine side)
xxxxxxxxxxroslaunch yahboomcar_nav view_cartographer.launch
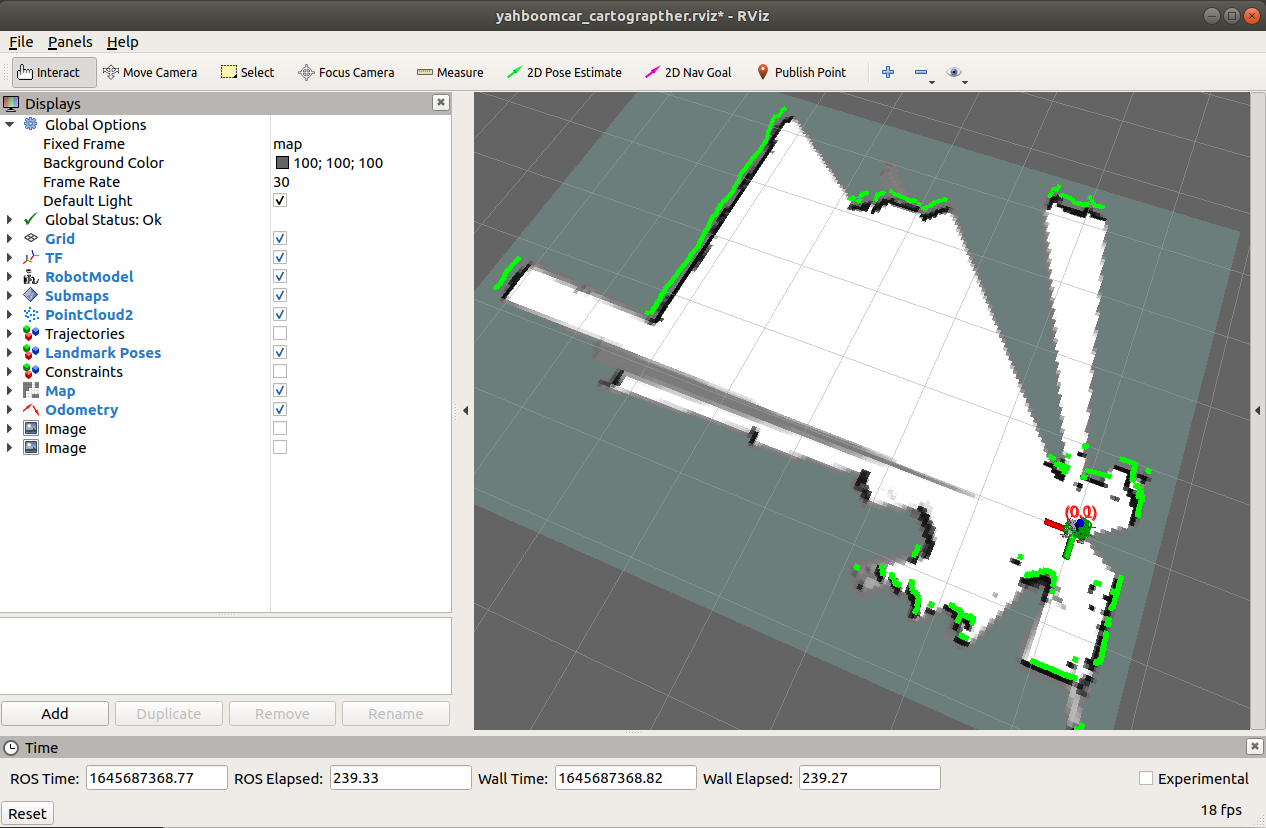
The gap at the back of the robot is due to the occlusion of the installation position of the display screen, so a certain range of Lidar data is shielded. The shielding range can be adjusted or not shielded according to the actual situation. For details, see [01. Lidar Basic Course].
9.2.2 Control the robot
- The keyboard controls the movement of the robot
x
rosrun teleop_twist_keyboard teleop_twist_keyboard.py # system integration roslaunch yahboomcar_ctrl yahboom_keyboard.launch # custom - The handle controls the movement of the robot
Make the robot walk all over the area to be built, and the map is as closed as possible.
There may be some scattered points during the mapping process. If the mapping environment is well closed and regular, the movement is slow, and the scattering phenomenon is much smaller.
9.2.3 Map save
xbash ~/yahboomcar_ws/src/yahboomcar_nav/maps/carto_map.sh
The map will be saved to ~/yahboomcar_ws/src/yahboomcar_nav/maps/ folder, a pgm image, a yaml file.
map.yaml
ximage : map.pgmresolution : 0.05origin : [-15.4,-12.2,0.0]negate : 0occupied_thresh : 0.65free_thresh: 0.196
Parameter parsing:
- image: The path of the map file, which can be an absolute path or a relative path
- resolution: the resolution of the map, m/pixel
- origin: The 2D pose(x, y, yaw) of the lower left corner of the map, where yaw is rotated counterclockwise(yaw=0 means no rotation). Many parts of the system currently ignore the yaw value.
- negate: whether to reverse the meaning of white/black, free/occupy(the interpretation of the threshold is not affected)
- occupied_thresh: Pixels with an occupancy probability greater than this threshold will be considered fully occupied.
- free_thresh: Pixels with an occupancy probability less than this threshold will be considered completely free.
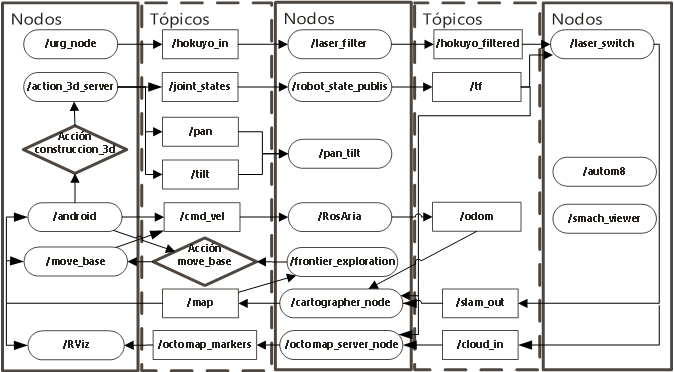
9.2.4 Node View
xxxxxxxxxxrqt_graph
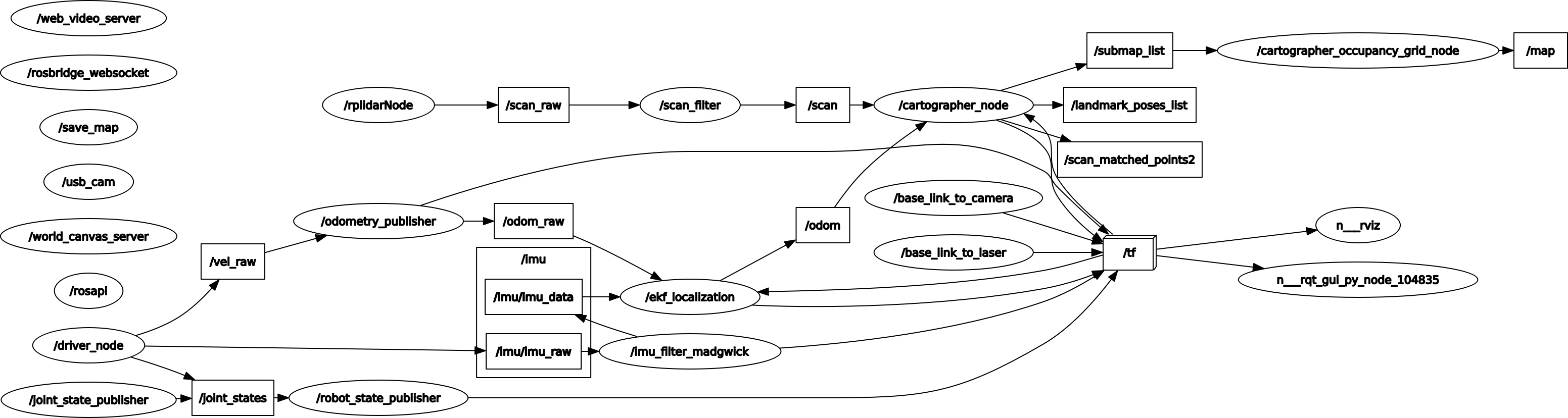
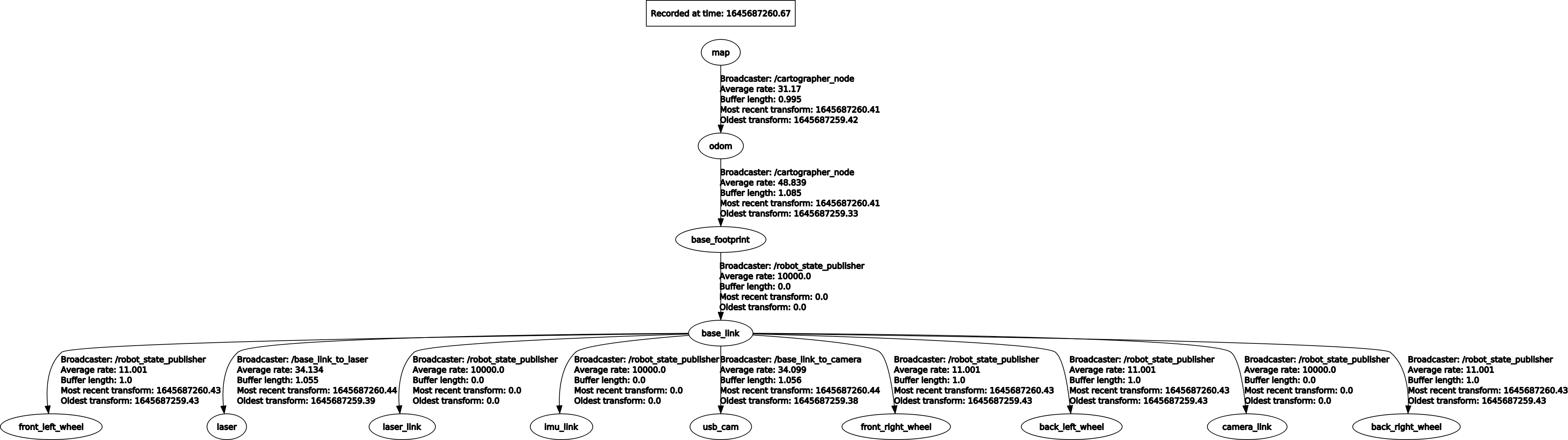
9.2.5 View tf tree
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree
9.3 configuration parameters
lua file
| parameter | illustrate |
|---|---|
| map_frame | map coordinate system |
| tracking_frame | Convert all sensor data to this coordinate system |
| published_frame | The coordinate system pointed to by map |
| odom_frame | Do you provide odom's tf? If true, the tf tree is map->odom->footprint; if false, the tf tree is map->footprint |
| provide_odom_frame | If true, the local, non-loop-closed, continuous pose will be published as odom_frame in map_frame? |
| publish_frame_projected_to_2d | If enabled, published poses will be restricted to pure 2D poses(no roll, pitch or z-offset) |
| use_odometry | Whether to use the odometer, if it is required, there must be odom's tf |
| use_nav_sat | whether to use gps |
| use_landmarks | whether to use landmark |
| num_laser_scans | Whether to use single-line laser data |
| num_multi_echo_laser_scans | whether to use multi_echo_laser_scans data |
| num_subdivisions_per_laser_scan | 1 frame of data is divided into several processing, usually 1 |
| num_point_clouds | Whether to use point cloud data |
| lookup_transform_timeout_sec | Timeout when looking for tf |
| submap_publish_period_sec | Time interval(seconds) for publishing submaps |
| pose_publish_period_sec | The time interval for releasing the pose, when the value is 5e-3, it is 200HZ |
| trajectory_publish_period_sec | The time interval for publishing the trajectory markers(trajectory nodes), the value is 30e-3 is 30ms |
| rangefinder_sampling_ratio | Fixed sampling frequency for lidar messages |
| odometry_sampling_ratio | Fixed sampling frequency of odometer messages |
| fixed_frame_pose_sampling_ratio | Fixed sampling frequency for fixed coordinate system messages |
| imu_sampling_ratio | Fixed sampling frequency for IMU messages |
| landmarks_sampling_ratio | Fixed sampling frequency for signpost messages |