5.Cartesian Path
1. Introduction
The Cartesian coordinate system is the collective name for the Cartesian coordinate system and the oblique coordinate system. A Cartesian path is actually a line connecting any two points in space.
2. Start
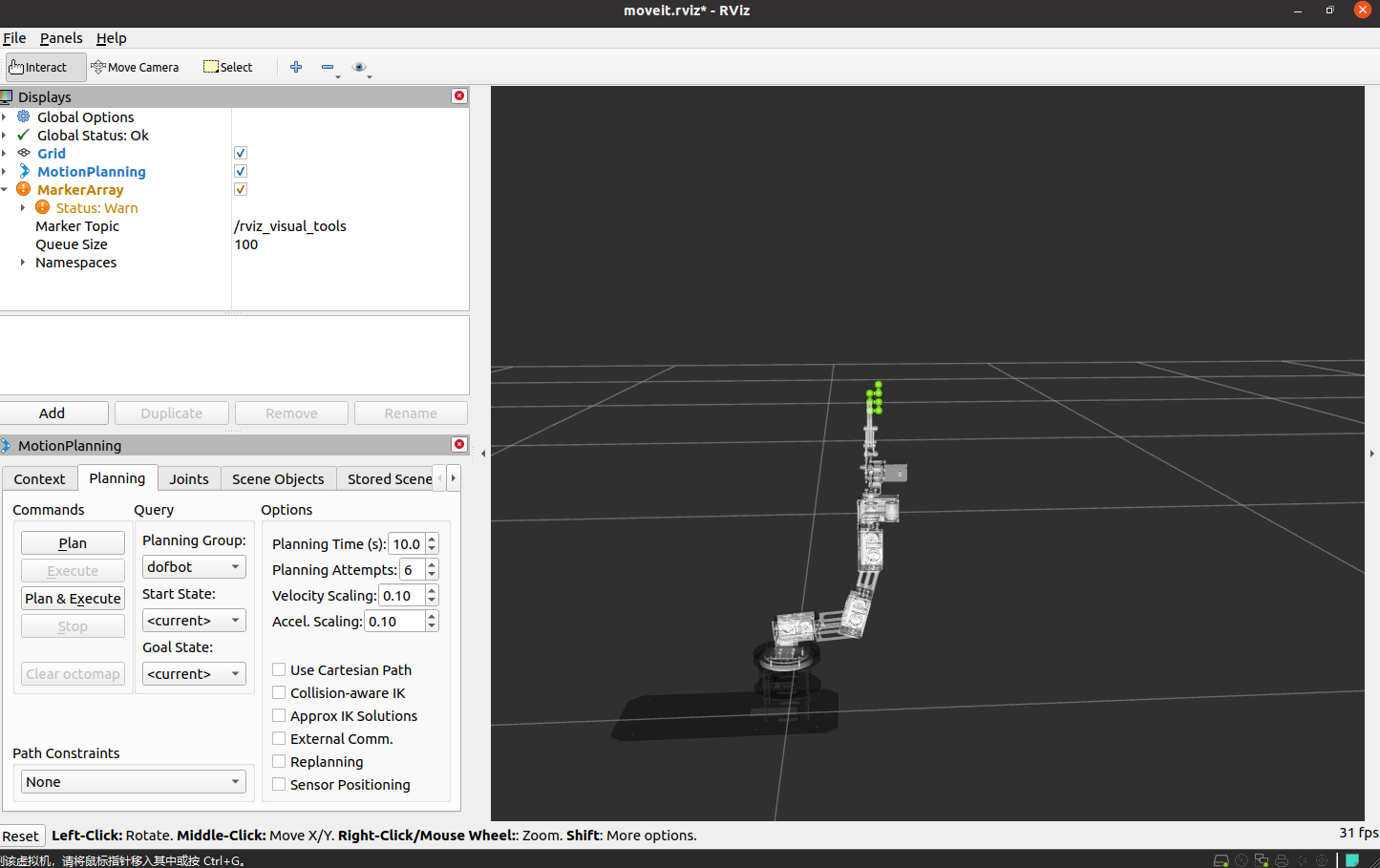
Start up MoveIT
roslaunch dofbot_config demo.launchStart Cartesian path code
xxxxxxxxxxrosrun dofbot_moveit 04_cartesian - C++ code examples
To view the trajectory, you need to add the [MarkerArray] plug-in and select the [/rviz_visual_tools] topic.
3. C++ code file
Set a specific location
x
ROS_INFO("Set Init Pose."); //Set specific location vector<double> pose{0, -0.69, -0.17, 0.86, 0}; yahboomcar.setJointValueTarget(pose);Add waypoint
x
//Initialize path point vector std::vector<geometry_msgs::Pose> waypoints; //Add initial pose to waypoint list waypoints.push_back(start_pose); start_pose.position.x -= 0.04; waypoints.push_back(start_pose); start_pose.position.z -= 0.02; waypoints.push_back(start_pose); start_pose.position.x += 0.04; waypoints.push_back(start_pose); start_pose.position.z -= 0.02; waypoints.push_back(start_pose); start_pose.position.x += 0.03; waypoints.push_back(start_pose);Waypoint planning
xxxxxxxxxxfraction = yahboomcar.computeCartesianPath(waypoints, eef_step, jump_threshold, trajectory);