6.QR code instructions
6.QR code instructions1. Introduction 2. Core content analysis3.OperationAppendix (QR code picture):
1. Introduction
This course mainly uses the robot's camera to obtain the camera's picture, identify the QR code information, and control the robot's movement based on the QR code information.
2. Core content analysis
Initialize the hexapod robot and set the camera pan/tilt angle. The default is S1=90 and S2=30. The initial angle can be modified according to actual needs.
from MutoLib import Mutog_bot = Muto()g_bot.Gimbal_1_2(90, 30)
Import the QR code parsing library pybar
xxxxxxxxxximport pyzbar.pyzbar as pyzbarfrom PIL import Image
If pybar is not installed on your system, please open a terminal and run the following command to install it.
xxxxxxxxxxpip3 install pyzbarsudo apt install libzbar-dev
Analyze the grayscale image and extract the information and image position of the QR code in the image. If there is no QR code in the image, the information is None.
xxxxxxxxxxdef detect_qrcode(image):# 转为灰度图像 Convert to grayscale imagegray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)barcodes = pyzbar.decode(gray)for barcode in barcodes:# 提取二维码的数据和边界框的位置 The data of the QR code and the position of the bounding box are extracted(x, y, w, h) = barcode.rectbarcodeData = barcode.data.decode("utf-8")barcodeType = barcode.type# print("[INFO] Found {} barcode: {}".format(barcodeType, barcodeData))car_control(barcodeData)return barcodeData, (x, y, w, h)return None, (0, 0, 0, 0)
Control the robot movement according to the string command of info. Among them, g_time_pass is the time of command movement, which can be adjusted according to actual needs, and the unit is 100 milliseconds. By default, the robot will automatically stop after executing the command for 2 seconds.
xxxxxxxxxxdef robot_action(data):global g_time_passif g_time_pass >= 0:returnprint("Data:", data)if data == "forward":g_bot.forward()g_time_pass = 10 * 2elif data == "back":g_bot.back()g_time_pass = 10 * 2elif data == "left":g_bot.left()g_time_pass = 10 * 2elif data == "right":g_bot.right()g_time_pass = 10 * 2elif data == "turnleft":g_bot.turnleft()g_time_pass = 10 * 2elif data == "turnright":g_bot.turnright()g_time_pass = 10 * 2elif data == "stop":g_time_pass = -1g_bot.zero_reset()
Define a task_time task to stop the robot automatically and not execute other QR code instructions during the movement of the robot. g_time_pass is in units of 100 milliseconds. When g_time_pass is greater than 0, it automatically decreases by 1 every 100 milliseconds and stops automatically when timeout occurs.
xxxxxxxxxxdef task_time():global g_time_passwhile True:if g_time_pass > 0:g_time_pass = int(g_time_pass - 1)if g_time_pass == 0:g_bot.stay_put()time.sleep(.1)g_time_pass = -1time.sleep(.1)
3.Operation
Open the jupyterLab client and find the code path:
xxxxxxxxxxmuto/Samples/AI_Samples/08_qrcode_recognition/qrcode_recognition.ipynb
Click to run all cells, and then scroll to the bottom to see the generated controls.

Click the Start button below to start identifying QR codes and execute instructions. The QR code that can be recognized in the current routine is QRCode. The information is "forward" for forward, "back" for backward, "left" for left translation, "right" for right translation, "turnleft" for left rotation, and "turnright" for Rotate right, "stop" means stop.
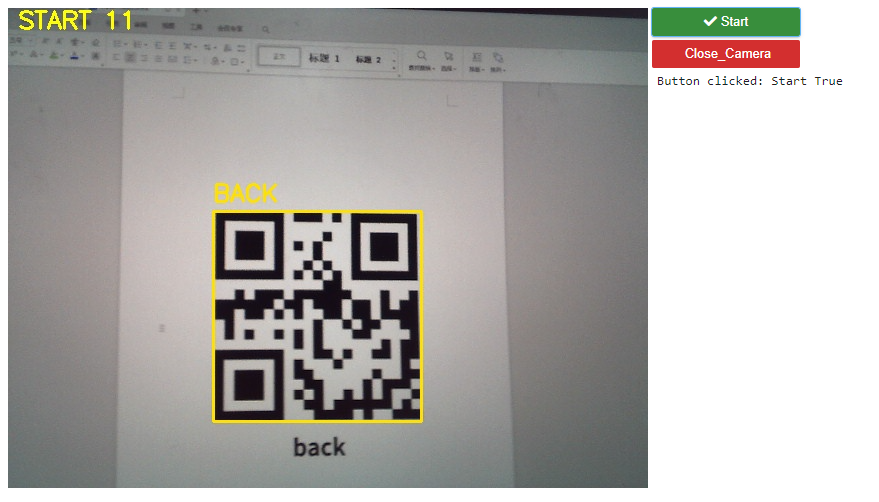
Finally click the Close_Camera button to close the camera.
Appendix (QR code picture):