3.Color tracking
1.Start program
Input following command:
xxxxxxxxxxros2 launch orbbec_camera orbbec_camera.launch.pyros2 run yahboomcar_astra colorHSVros2 run yahboomcar_astra colorTracker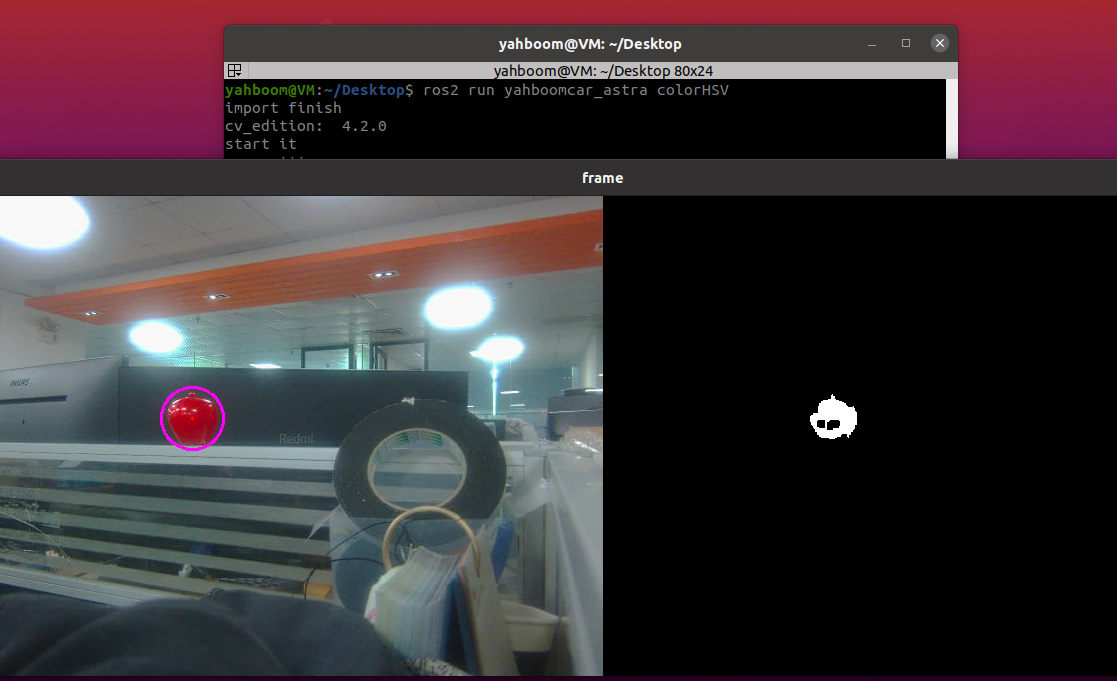
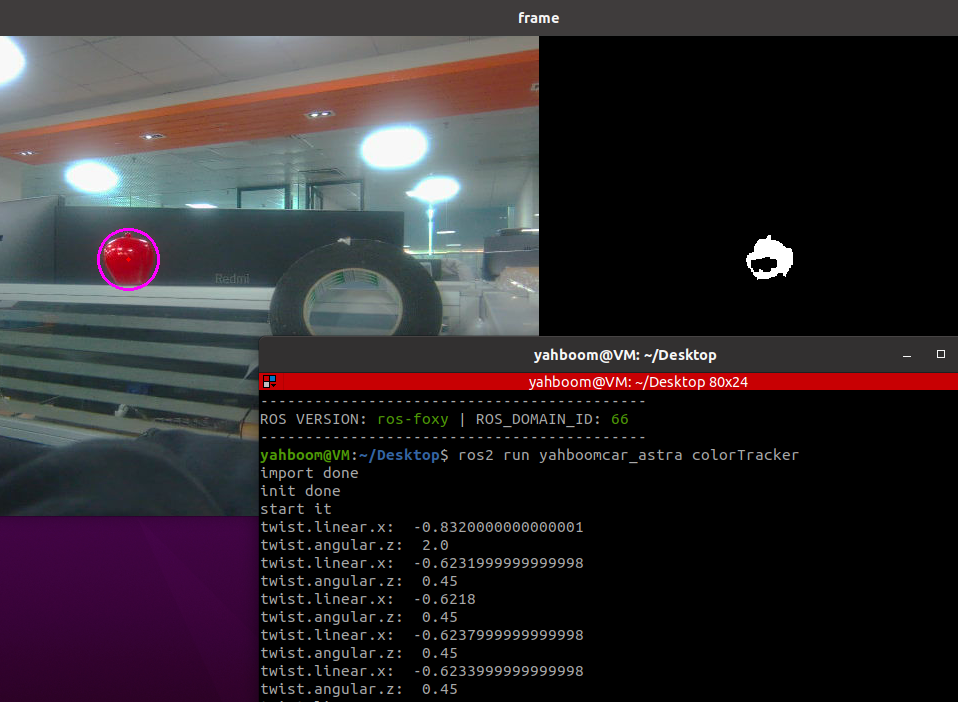
After successful startup, the above screen will be displayed, and the program will initially load the HSV value, and then display the processed image. Press the [r] button to reselect the color and use the mouse to box out the color to be tracked. The selected area can only have one color. After selecting the color to be tracked, the program completes the image processing and presses the spacebar to start tracking. The terminal that starts colorTracker will display.
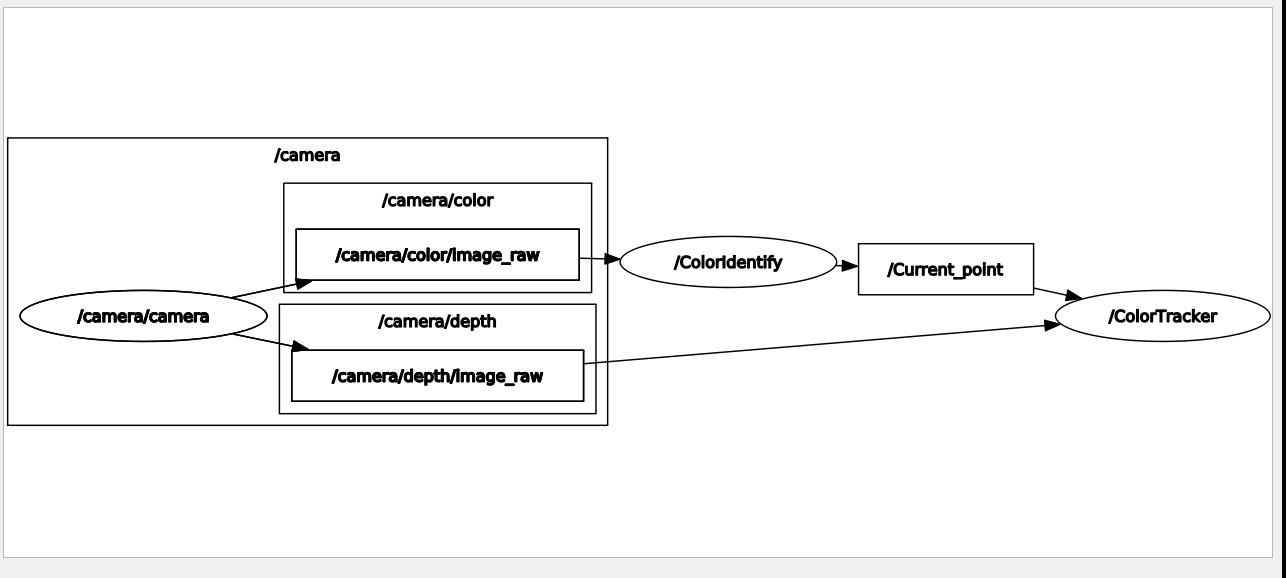
View communication between nodes, input following command.
xxxxxxxxxxros2 run rqt_graph rqt_graph
3.2 Code
Code path:
xxxxxxxxxx~/orbbec_ws/src/yahboomcar_astra/yahboomcar_astra/colorHSV.py~/orbbec_ws/src/yahboomcar_astra/yahboomcar_astra/colorTracker.py
3.2.1、colorHSV.py
This program mainly has the following functions:
- Subscribe to camera image data;
- Obtain keyboard and mouse events for switching modes and color selection;
- Process images and publish the center coordinates of tracked objects and publish them
Some core codes are as follows:
xxxxxxxxxx#创建发布者和订阅者self.pub_position = self.create_publisher(Position,"/Current_point", 10)self.sub_img =self.create_subscription(Image,'/camera/color/image_raw',self.handleTopic,1)#订阅图像回调函数把图像传process函数frame, binary =self.process(frame, action)#获取键盘鼠标事件,得到hsv的值;if action == 32: self.Track_state = 'tracking'elif action == ord('i') or action == ord('I'): self.Track_state ="identify"elif action == ord('r') or action == ord('R'): self.Reset()elif action == ord('q') or action == ord('Q'): self.cancel()if self.Track_state == 'init':cv.namedWindow(self.windows_name, cv.WINDOW_AUTOSIZE)cv.setMouseCallback(self.windows_name, self.onMouse, 0)if self.select_flags == True:cv.line(rgb_img, self.cols, self.rows, (255, 0, 0), 2)cv.rectangle(rgb_img, self.cols, self.rows, (0, 255, 0), 2)if self.Roi_init[0] != self.Roi_init[2] and self.Roi_init[1] !=self.Roi_init[3]:rgb_img, self.hsv_range = self.color.Roi_hsv(rgb_img,self.Roi_init)self.gTracker_state = Trueself.dyn_update = Trueelse: self.Track_state = 'init'#计算中心坐标的值,self.circle存放xy值rgb_img, binary, self.circle = self.color.object_follow(rgb_img, self.hsv_range)#发布中心坐标的消息threading.Thread(target=self.execute, args=(self.circle[0], self.circle[1],self.circle[2])).start()def execute(self, x, y, z):position = Position()position.anglex = x * 1.0position.angley = y * 1.0position.distance = z * 1.0self.pub_position.publish(position)3.2.2、colorTracker.py
The main function of this program is to receive/Current_ Point and depth image topic data, calculate speed size, and then publish speed data.
xxxxxxxxxx#定义订阅者接收需要的话题数据self.sub_depth =self.create_subscription(Image,"/camera/depth/image_raw",self.depth_img_Callback, 1)self.sub_position=self.create_subscription(Position,"/Current_point",self.positionCallback,1)#定义速度发布者self.pub_cmdVel = self.create_publisher(Twist,'/cmd_vel',10)#两个重要的回调函数,获取到self.Center_x值和distance_值def positionCallback(self, msg):def depth_img_Callback(self, msg): #self.Center_x值和distance_值根据计算线速度,角速度 self.execute(self.Center_x, distance_) def execute(self, point_x, dist): self.get_param() if abs(self.prev_dist - dist) > 300: self.prev_dist = dist return if abs(self.prev_angular - point_x) > 300: self.prev_angular = point_x return if self.Joy_active == True: return linear_x = self.linear_pid.compute(dist, self.minDist) angular_z = self.angular_pid.compute(320, point_x) if abs(dist - self.minDist) < 30: linear_x = 0 if abs(point_x - 320.0) < 30: angular_z = 0 twist = Twist() if angular_z>2.0: angular_z = 2.0 if angular_z<-2.0: angular_z = -2.0 if linear_x > 1.0: linear_x = 1.0 if linear_x <-1.0: linear_x = -1.0 twist.angular.z = angular_z * 1.0 twist.linear.x = linear_x * 1.0