10.Driver library and communication
10.Driver library and communication1、Install serial port driver library2.Install robot driver library
1、Install serial port driver library
Since the robot and the underlying expansion board use serial port communication, the serial port driver library needs to be installed before it can be used. The Yahboom Muto system has already installed the serial port driver, so you can ignore the following steps.
The Ubuntu system has multiple serial libraries. Installation errors may cause the serial port to fail to communicate properly. Please follow the steps below to install the serial port driver library.
Open the terminal and enter the following command to install the serial port driver
sudo pip3 install pyserial
Check the version number of the serial port driver library
xxxxxxxxxxpip3 list | grep pyserial

2.Install robot driver library
The Yahboom Muto mirror system has already installed the latest robot driver library, so there is no need to reinstall it. You only need to install the robot driver library if you are not using a Yahboom image or if the driver library has updated content.
The following installation process takes Jetson Nano’s installation of the MutoLib driver library as an example:
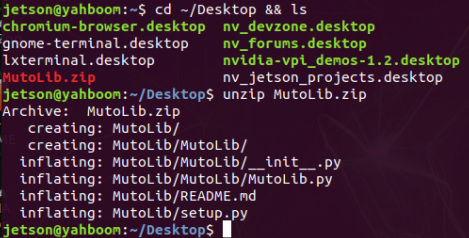
Transfer the driver library file to the system, taking transferring to the desktop as an example, and decompress it to obtain the corresponding MutoLib folder.
xxxxxxxxxxcd ~/Desktop && lsunzip MutoLib.zip
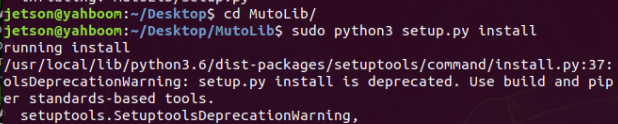
Start install drive library.
xxxxxxxxxxcd MutoLibsudo python3 setup.py install
Check the version number after installation.
xxxxxxxxxxpip3 list | grep MutoLib

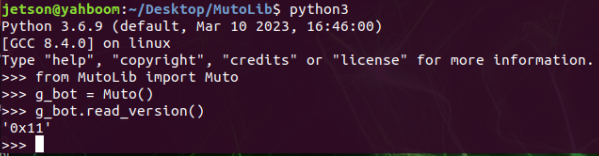
Test the underlying firmware version number of the read version.
xxxxxxxxxxpython3from MutoLib import Mutog_bot = Muto()g_bot.read_version()
Muto has two optional parameters Muto (port="/dev/myserial", debug=False).
The port parameter indicates the specified serial port device number.
By default, /dev/myserial has been specified. If the factory image is not used, it can be modified to / Device numbers such as dev/ttyUSB0; the parameter debug=True means printing debugging information, False means not printing debugging information.