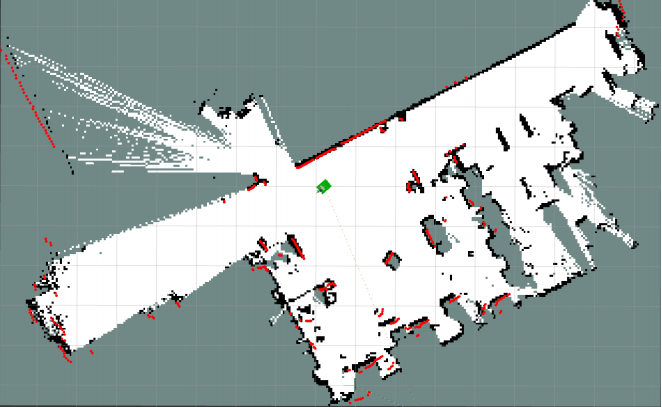
6.Lidar mapping
Note: This course uses Rosmaster-X3 as an example. Users need to modify it according to their own motion model.
Different from the handheld lidar mapping content, this mapping adds odom data, so if you use your own motion model, you also need to have odom data.
Function package path: ~/oradar_ws/src/yahboomcar_nav
This section focuses on several commonly used mapping algorithms: gampping、hector、karto、cartographer。
6.1 Start mapping
Input following command:
roslaunch yahboomcar_nav laser_bringup.launchroslaunch yahboomcar_nav yahboomcar_map.launch map_type:=gmapping
Note: When building a map, the slower the speed, the better the effect (note that the rotation speed should be slower). If the speed is too fast, the effect will be poor.
- Parameter map_type: mapping algorithm, you can choose gmapping, hector, karto, cartographer, the default is gmapping
Keyboard control robot:
xxxxxxxxxxroslaunch yahboomcar_ctrl yahboom_keyboard.launch
Make the robot cover the area to be mapped and the map should be as closed as possible.
6.2 Save map
cartographer: Input following command
x
bash ~/oradar_ws/src/yahboomcar_nav/maps/carto_map.shgampping、hector、karto:Input following command
x
bash ~/yahboomcar_ws/src/yahboomcar_nav/maps/map.sh
The map will be saved to the ~/rplidar_ws/src/yahboomcar_nav/maps/ folder, a pgm image and a yaml file.
6.3 Mapping algorithm
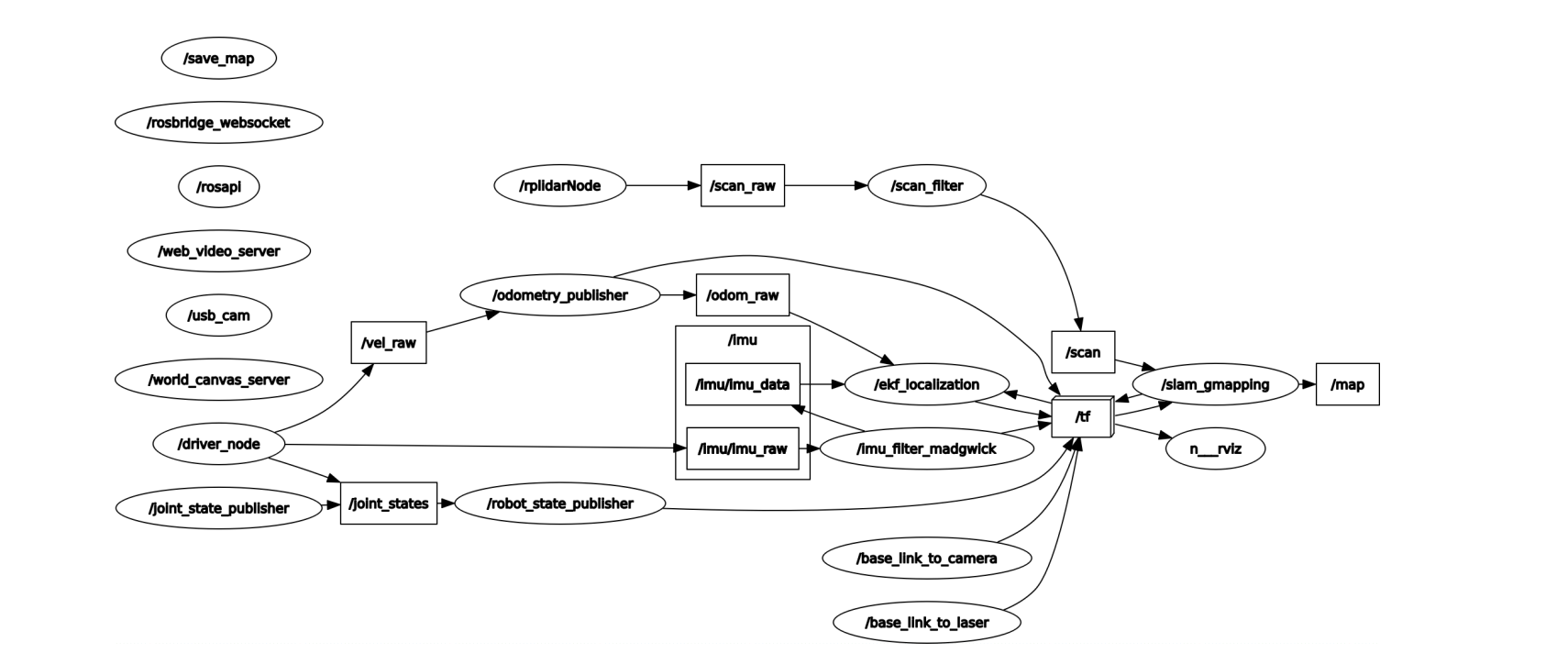
6.3.1 gmapping
1)Topics and services
| Subscribe to topics | Type | Description |
|---|---|---|
| tf | tf/tfMessage | Used for conversion between lidar coordinate system, base coordinate system and odometer coordinate system |
| scan | sensor_msgs/LaserScan | Lidar scan data |
| Topic | Type | Description |
| map_metadata | nav_msgs/MapMetaData | Publish map Meta data |
| map | nav_msgs/OccupancyGrid | Publish map raster data |
| ~entropy | std_msgs/Float64 | Release the estimation of robot pose distribution entropy |
| Service | Type | Description |
| dynamic_map | nav_msgs/GetMap | Get map data |
View node
xxxxxxxxxxrqt_graph
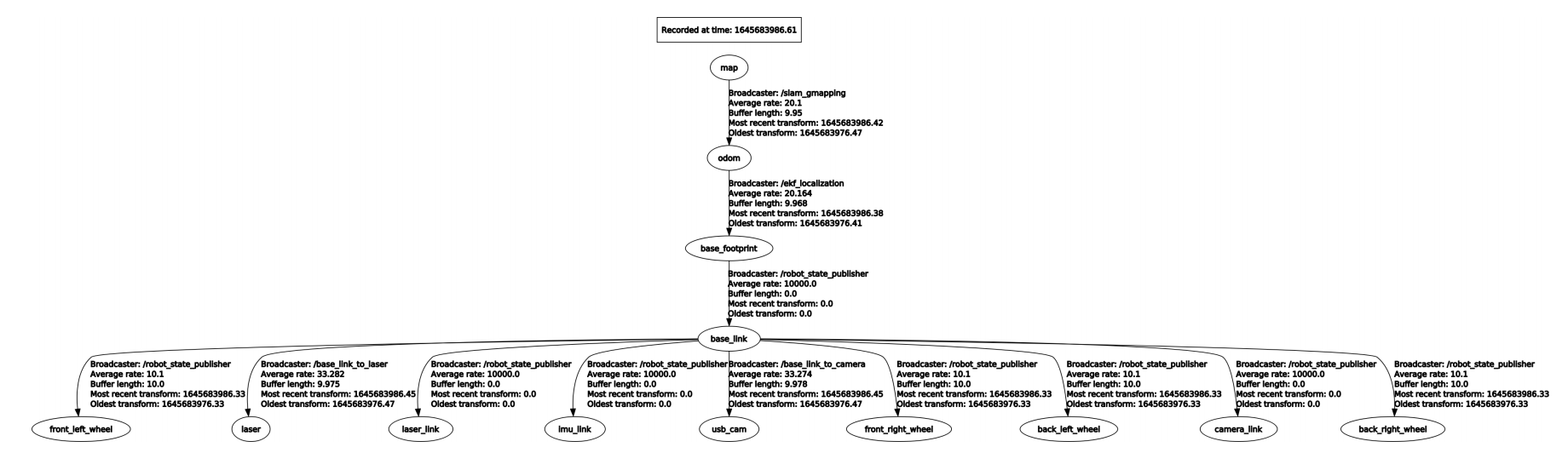
3)TF Transforms
| Required tf Transforms TF | Description |
|---|---|
| laser-->base_link | sually a fixed value, broadcast periodically by a robot_state_publisher, or a tf static_transform_publisher. |
| base_link-->odom | usually provided by the odometry system (e.g., the driver for the mobile base) |
| Provided tf Transforms | Description |
| map-->odom | the current estimate of the robot's pose within the map frame |
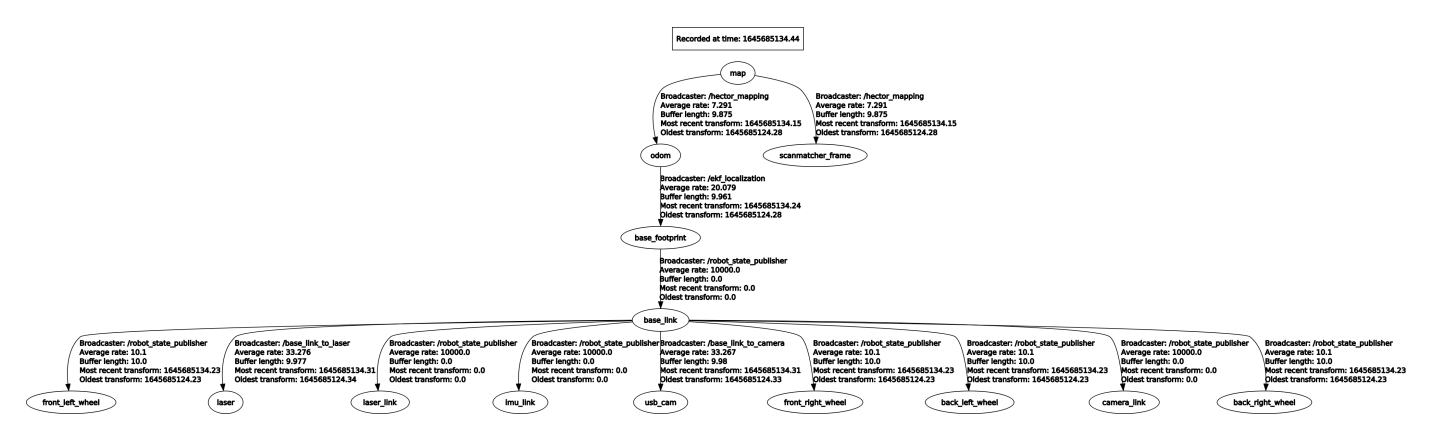
View TF tree
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree
4)Website:
Gmapping:http://wiki.ros.org/gmapping/
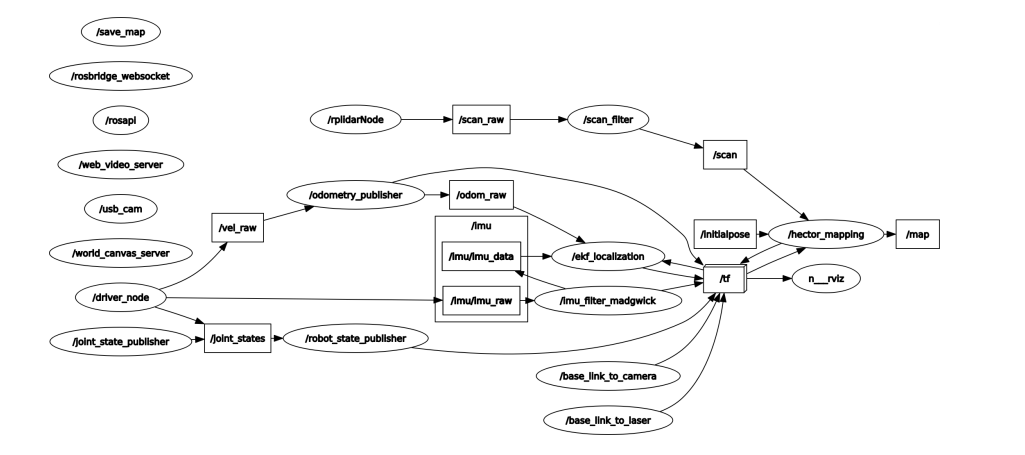
6.3.2 hector
1)Introduction
Features: hector_slam does not need to subscribe to the odometer/odom message, uses the Gauss Newton method, and directly uses the lidar to estimate the odometer information. However, when the robot speed is faster, it will cause deviations in the mapping effect, and the requirements for sensors are high.
When building maps, adjust the rotation speed of the trolley as low as possible.
2)Topics and services
| Topic subscription | Type | Description |
|---|---|---|
| scan | sensor_msgs/LaserScan | The laser scan used by the SLAM system. |
| syscommand | std_msgs/String | System command. If the string equals "reset" the map and robot pose are reset to their inital state. |
| Published Topics | Type | Description |
| map_metadata | nav_msgs/MapMetaData | Get the map data from this topic |
| map | nav_msgs/OccupancyGrid | Get the map data from this topic |
| slam_out_pose | geometry_msgs/PoseStamped | The estimated robot pose without covariance |
| poseupdate | geometry_msgs /PoseWithCovarianceStamped | The estimated robot pose with an gaussian estimate of uncertainty |
| Services | Type | Description |
| dynamic_map | nav_msgs/GetMap | Call this service to get the map data. |
| reset_map | std_srvs/Trigger | Call this service to reset the map, and hector will start a whole new map from scratch. Notice that this doesn't restart the robot's pose, and it will restart from the last recorded pose. |
| pause_mapping | std_srvs/SetBool | Call this service to stop/start processing laser scans. |
| restart_mapping_with_new_pose | hector_mapping/ResetMapping | Call this service to reset the map, the robot's pose, and resume mapping (if paused) |
View nodes
xxxxxxxxxxrqt_graph
View TF tree
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree
3)TF Transforms
| Required tf Transforms | Description |
|---|---|
| laser-->base_link | usually a fixed value, broadcast periodically by a robot_state_publisher, or a tf static_transform_publisher. |
| Provided tf Transforms | Description |
| map-->odom | the current estimate of the robot's pose within the map frame (only provided if parameter "pub_map_odom_transform" is true). |
4) Website:
hector_slam:http://wiki.ros.org/hector_slam
hector_slam/Tutorials:http://wiki.ros.org/hector_slam/Tutorials/SettingUpForYourRobot
hector_mapping:http://wiki.ros.org/hector_mapping
6.3.3 karto
1) Introduction
Karto is a 2D laser SLAM solution, which is based on a sparse graph optimization method with closed loop detection. Karto uses the spa (karto_slam) or g2o (nav2d) optimization library, and the front-end and back-end uses a single-threaded process. It uses odom to predict the initial position.
2)Topics and Services
| Subscribed Topics | Type | Description |
|---|---|---|
| scan | sensor_msgs/LaserScan | Transforms necessary to relate frames for laser, base, and odometry |
| tf | tf/tfMessage | Laser scans to create the map from |
| Published Topics | Type | Description |
| map_metadata | nav_msgs/MapMetaData | Get the metadata of the map data (resolution, width, height, ...) |
| map | nav_msgs/OccupancyGrid | Get the map data from this topic, which is latched, and updated periodically |
| visualization_marker_array | visualisation_msgs / MarkerArray | Get the pose graph from this topic, which is updated periodically |
| Published Topics | Type | Description |
| dynamic_map | nav_msgs/GetMap | Call this service to get the map data |
3)Parameters
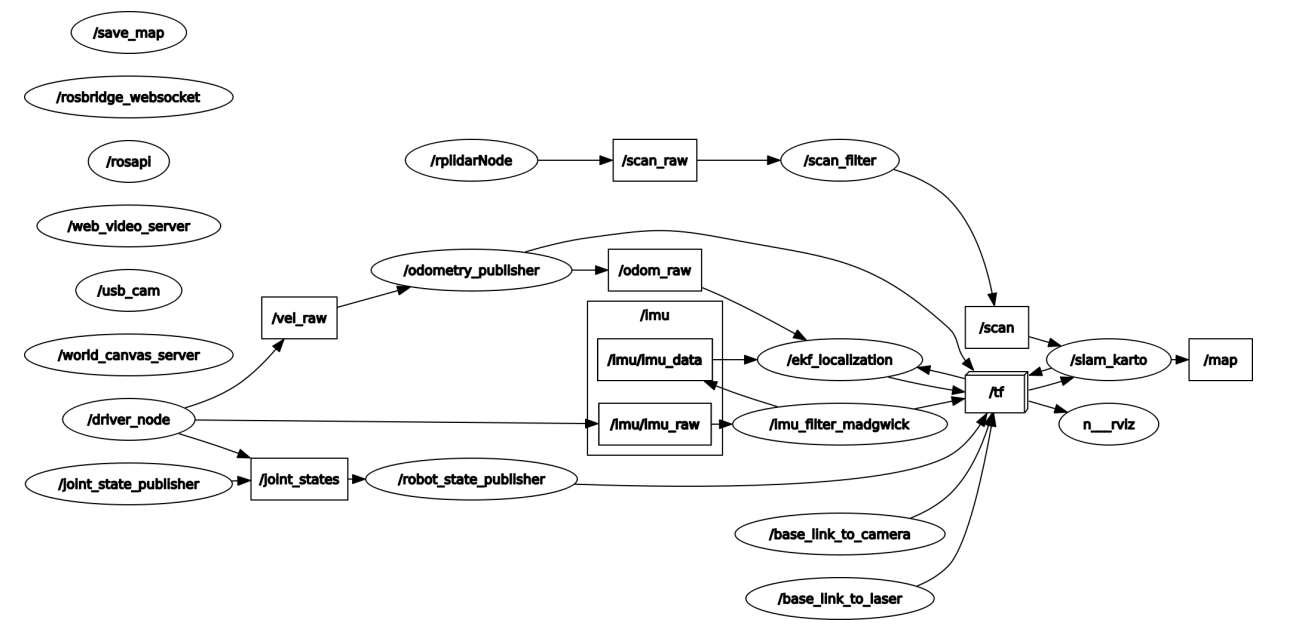
View node
xxxxxxxxxxrqt_graph
3) TF Transforms
| Required tf Transforms | Description |
|---|---|
| laser-->base_link | usually a fixed value, broadcast periodically by a robot_state_publisher, or a tf static_transform_publisher. |
| base_link-->odom | usually provided by the odometry system (e.g., the driver for the mobile base) |
| Provided tf TransformsTF | Description |
| map-->odom | the current estimate of the robot's pose within the map frame |
####
View TF tree
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree
Website:
karto:http://wiki.ros.org/slam_karto
6.3.4 cartographer
1)Introduction
Cartographer is a 2D and 3D SLAM (simultaneous localization and mapping) library supported by a ROS system open sourced by Google. A graph-building algorithm based on graph optimization (multi-threaded back-end optimization, problem optimization built by cere). Data from multiple sensors (for example, LIDAR, IMU, and camera) can be combined to calculate the position of the sensor simultaneously and map the environment around the sensor.
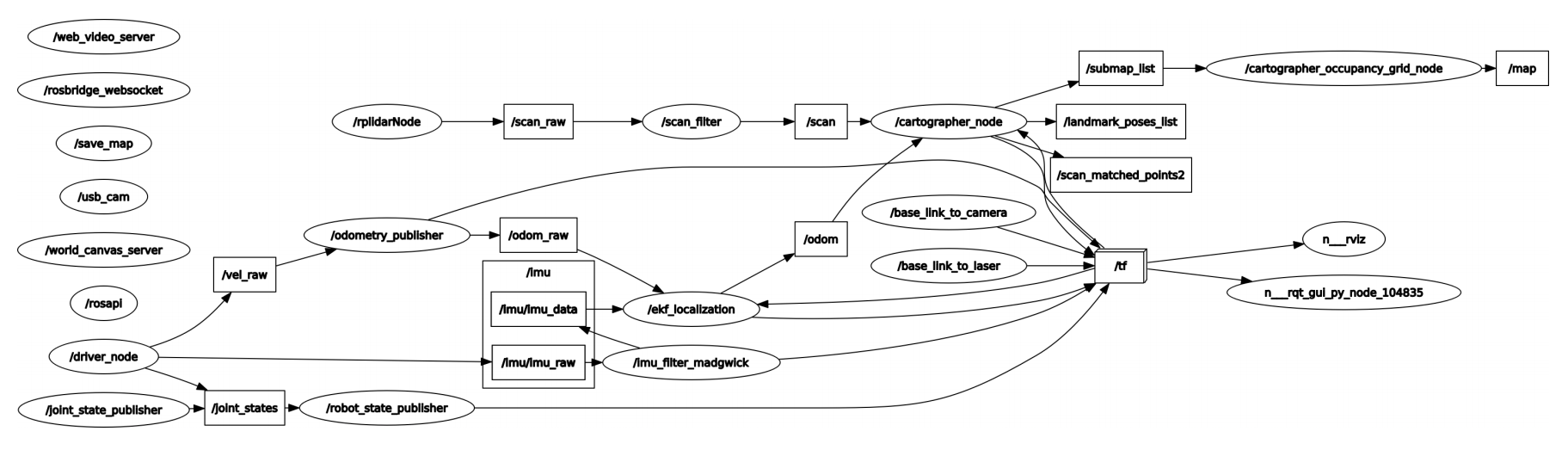
2)View node
xxxxxxxxxxrqt_graph
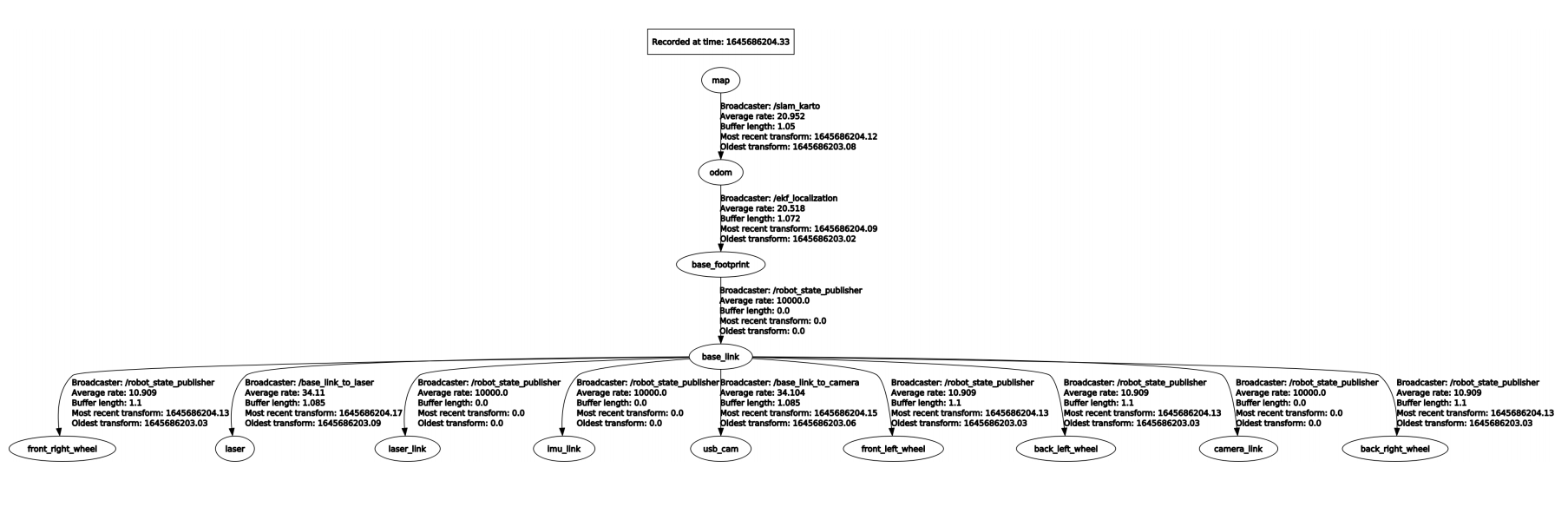
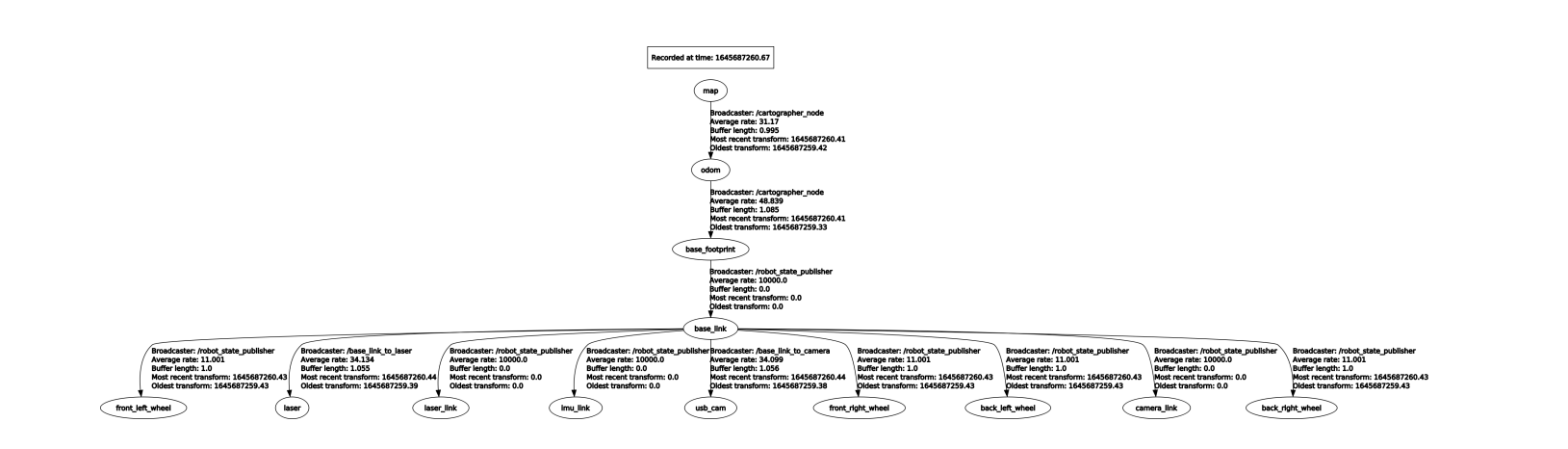
3)View TF transformation
xxxxxxxxxxrosrun rqt_tf_tree rqt_tf_tree
4)Parameters lua file
| Parameters | Description |
|---|---|
| map_frame | Map coordinate system |
| tracking_frame | Convert all sensor data to this coordinate system |
| published_frame | The map points to coordinate system the |
| odom_frame | If true, the tf tree is map->odom->footprint; if false, the tf tree is map->footprint |
| provide_odom_frame | If true, the local, non-loop-closed, continuous pose will be published as odom_frame in map_frame |
| publish_frame_projected_to_2d | If enabled, the published pose will restrict 2D poses |
| use_odometry | Whether to use the odometer, if you use it, you must have odom tf |
| use_nav_sat | Whether to use gps |
| use_landmarks | Whether to use landmark |
| num_laser_scans | Whether to use single-line laser data |
| num_multi_echo_laser_scans | Whether to use multi_echo_laser_scans data |
| num_subdivisions_per_laser_scan | 1 frame of data is divided into several processings, in generally it is 1 |
| num_point_clouds | Whether to use point cloud data |
| lookup_transform_timeout_sec | Find the timeout of tf |
| submap_publish_period_sec | Time interval for publishing submap (seconds) |
| pose_publish_period_sec | The time interval for posting pose, when the value is 5e-3, it is 200HZ |
| trajectory_publish_period_sec | The time interval for publishing trajectory markers (trajectory nodes), the value is 30e-3 to 30ms |
| rangefinder_sampling_ratio | Fixed sampling frequency of lidar messages |
| odometry_sampling_ratio | Fixed sampling frequency of odometer messages |
| fixed_frame_pose_sampling_ratio | Fixed sampling frequency of fixed coordinate system messages |
| imu_sampling_ratio | Fixed sampling frequency of IMU messages |
| landmarks_sampling_ratio | Fixed sampling frequency for road sign messages |
5)Website
Cartographer:https://google-cartographer.readthedocs.io/en/latest/
Cartographer ROS:https://google-cartographer-ros.readthedocs.io/en/latest/