Lio-Sam algorithm compilation
1、Install dependencies
ROS(ubuntu 18.04 melodic)
Ceres solver
GTSAM
ndt_omp
2、Source code path
imuCalibEx:
src/imuCalibEx
Lio-Sam:
xxxxxxxxxxsrc/Lio_Sam
3、compile
Here we take Jetson nano as an example. The installation environment is ubuntu 18.04 and the ROS version is melodic. ROS (ubuntu 18.04 melodic), Ceres solver, GTSAM and other dependencies have been installed by default.
compile
If it is the first time to compile, please enter the following command:
xsudo mv /usr/include/flann/ext/lz4.h /usr/include/flann/ext/lz4.h.baksudo mv /usr/include/flann/ext/lz4hc.h /usr/include/flann/ext/lz4.h.baksudo ln -s /usr/include/lz4.h /usr/include/flann/ext/lz4.hsudo ln -s /usr/include/lz4hc.h /usr/include/flann/ext/lz4hc.h
Then enter Lio_Sam's workspace to compile
xxxxxxxxxxcd ~/lio_sam_wscatkin build
Compilation completed effect:
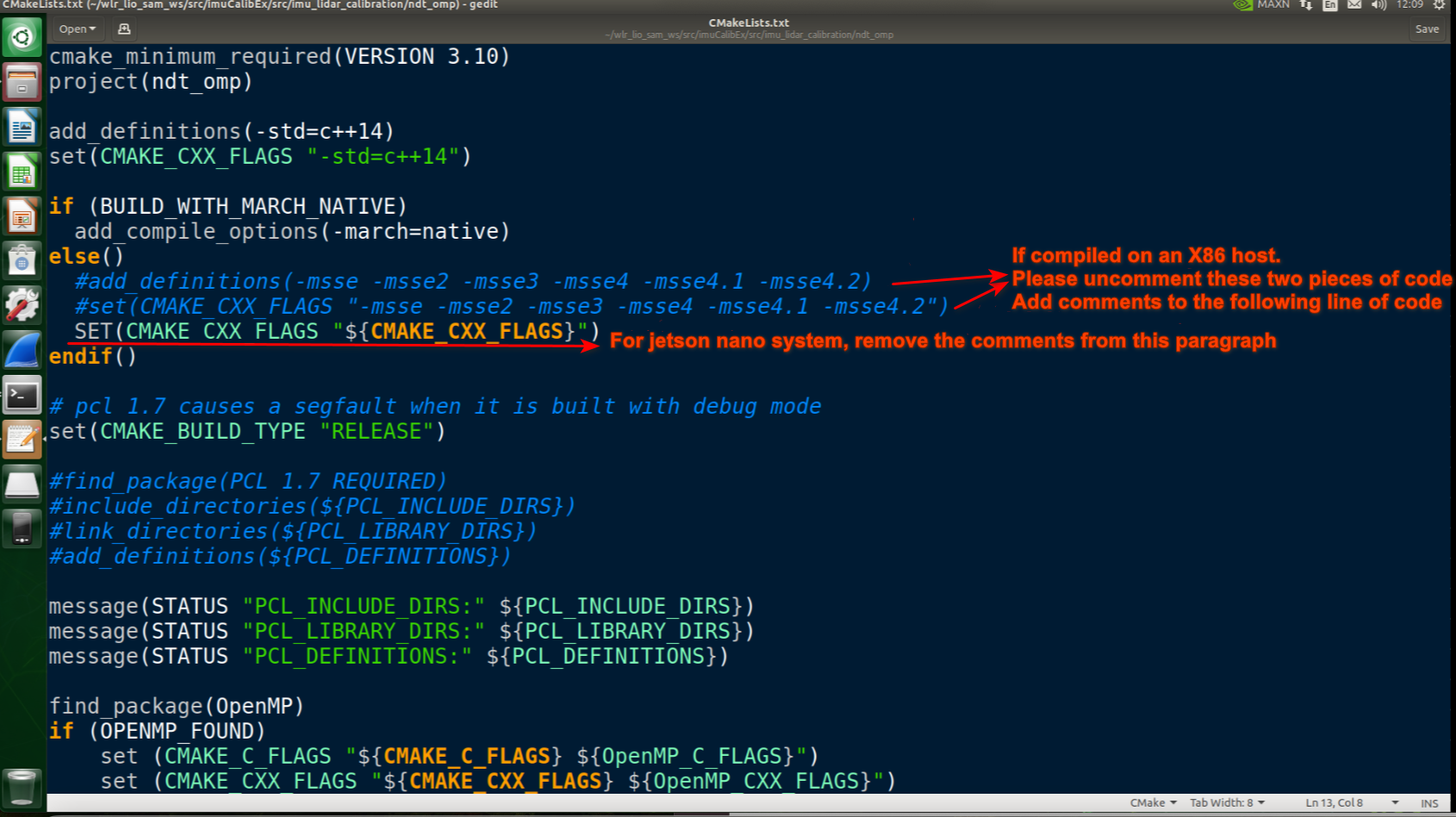
What you need to pay attention to is that when compiling imuCalibEx, if you are using a Jetson nano class arm motherboard. You need to modify the src/imuCalibEx/src/imu_lidar_calibration/ndt_omp/CMakeLists.txt file, refer to the location shown in the example picture below
xxxxxxxxxxSET(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS}")
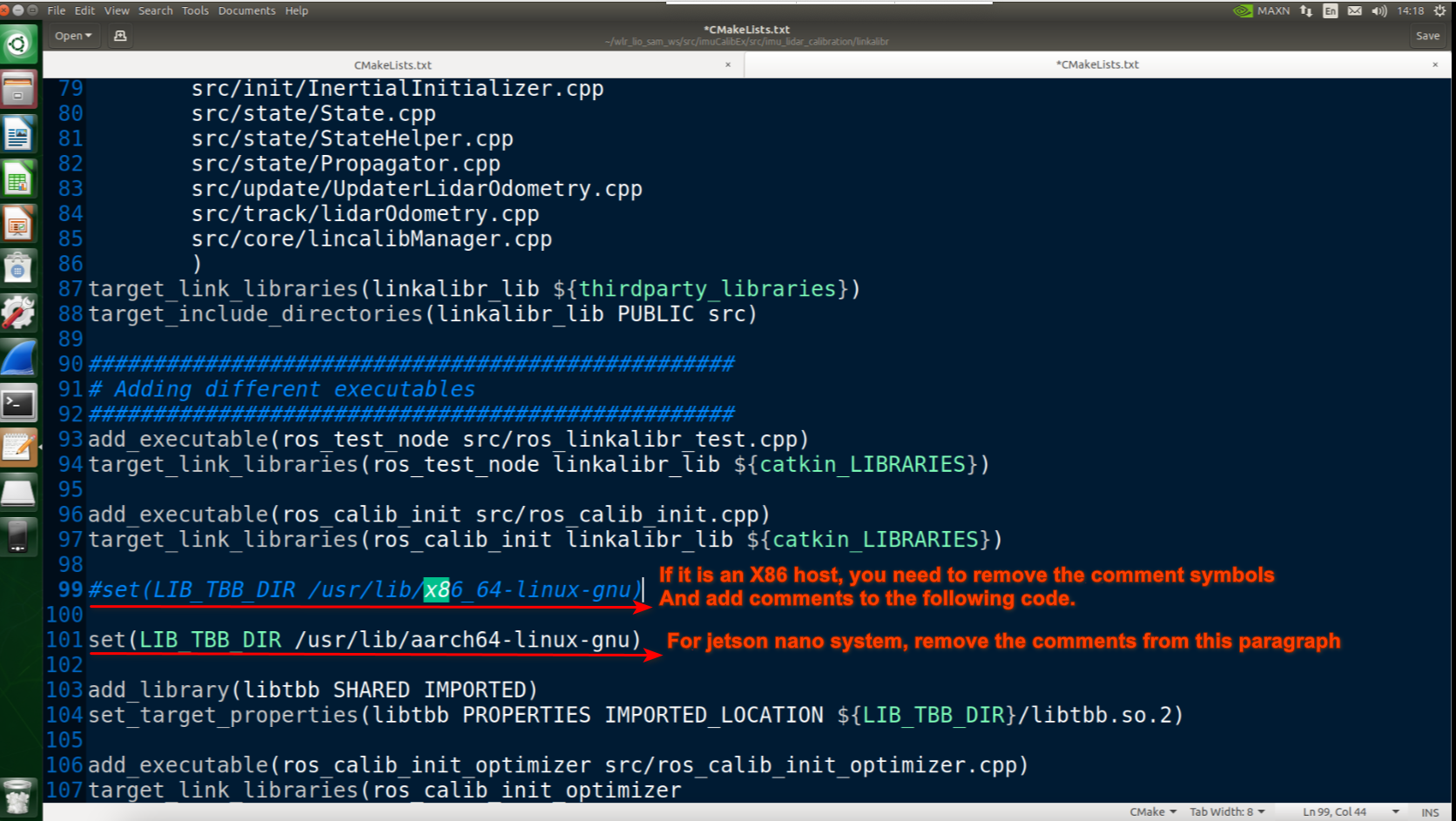
You also need to modify the src/imuCalibEx/src/imu_lidar_calibration/linkalibr/CMakeLists.txt file as shown below.
xxxxxxxxxxset(LIB_TBB_DIR /usr/lib/aarch64-linux-gnu)