AutoWare compilation
1、Install dependencies
ROS(ubuntu 18.04 melodic)
2、Source code path
Auroware.ai:
xxxxxxxxxx#This is the code for x86 motherboardsrc/
xxxxxxxxxx#This is the code for the Jetson control panel, with some slight modifications. (Mainly affected by different opencv versions)src_jetson/
autoware_share is the official test file and rviz configuration file
3、Compile
Take a laptop or host with Ubuntu 18.04 system, 1050ti graphics card, and CUDA 10.0 as an example. The graphics driver has been installed by default and the CUDA environment variable configuration has been completed. At the same time, the ros melodic environment has been installed.Remember that tensorrt is version 7.2 and opencv version is 3.2.
Compile under this premise
If there is no source code, enter the following command in the terminal:
xxxxxxxxxxmkdir -p autoware.ai/srccd autoware.aiwget -O autoware.ai.repos "https://raw.githubusercontent.com/Autoware-AI/autoware.ai/1.12.0/autoware.ai.repos"vcs import src < autoware.ai.repos
If you don’t want to download the source code, you can directly use the source code of the tutorial. The source code is located in autoware/src. You can copy the src folder directly to the newly created autoware.ai folder above.
Then enter the following command in the terminal.
xxxxxxxxxxcd autoware.aisudo rosdepc initrosdepc updaterosdepc install -y --from-paths src --ignore-src --rosdistro melodic
The above step will detect the dependencies required by our installation package and automatically install some dependencies.
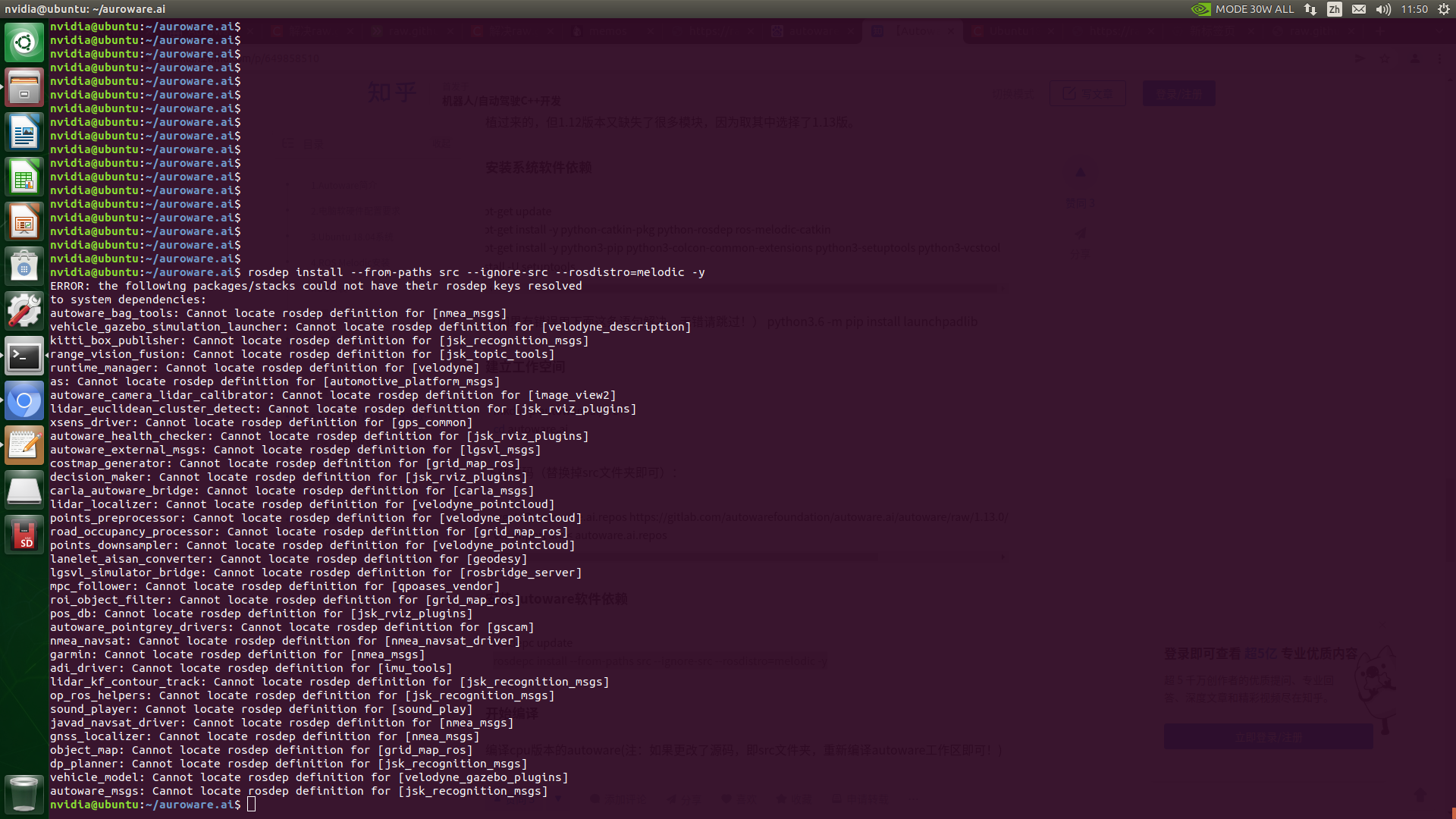
If the above problem occurs, it is because some packages are not installed. You can use the following command to install it.
xxxxxxxxxxsudo apt install ros-melodic-nmea-msgs ros-melodic-velodyne-description ros-melodic-jsk-recognition-msgs ros-melodic-jsk-topic-tools ros-melodic-velodyne ros-melodic-automotive-platform-msgs ros-melodic-image-view2 ros-melodic-jsk-rviz-plugins ros-melodic-gps-common ros-melodic-jsk-rviz-plugins ros-melodic-lgsvl-msgs ros-melodic-grid-map-ros ros-melodic-carla-msgs ros-melodic-velodyne-pointcloud ros-melodic-geodesy ros-melodic-rosbridge-server ros-melodic-qpoases-vendor ros-melodic-gscam ros-melodic-nmea-navsat-driver ros-melodic-imu-tools ros-melodic-jsk-recognition-msgs ros-melodic-velodyne-gazebo-plugins ros-melodic-automotive-navigation-msgs ros-melodic-velocity-controllers ros-melodic-uvc-camera ros-melodic-effort-controllers ros-melodic-image-transport-plugins
After the installation is complete, enter the following command again
xxxxxxxxxxrosdepc install -y --from-paths src --ignore-src --rosdistro melodic
If the following phenomenon occurs, it means that the dependencies required for compilation are completely installed.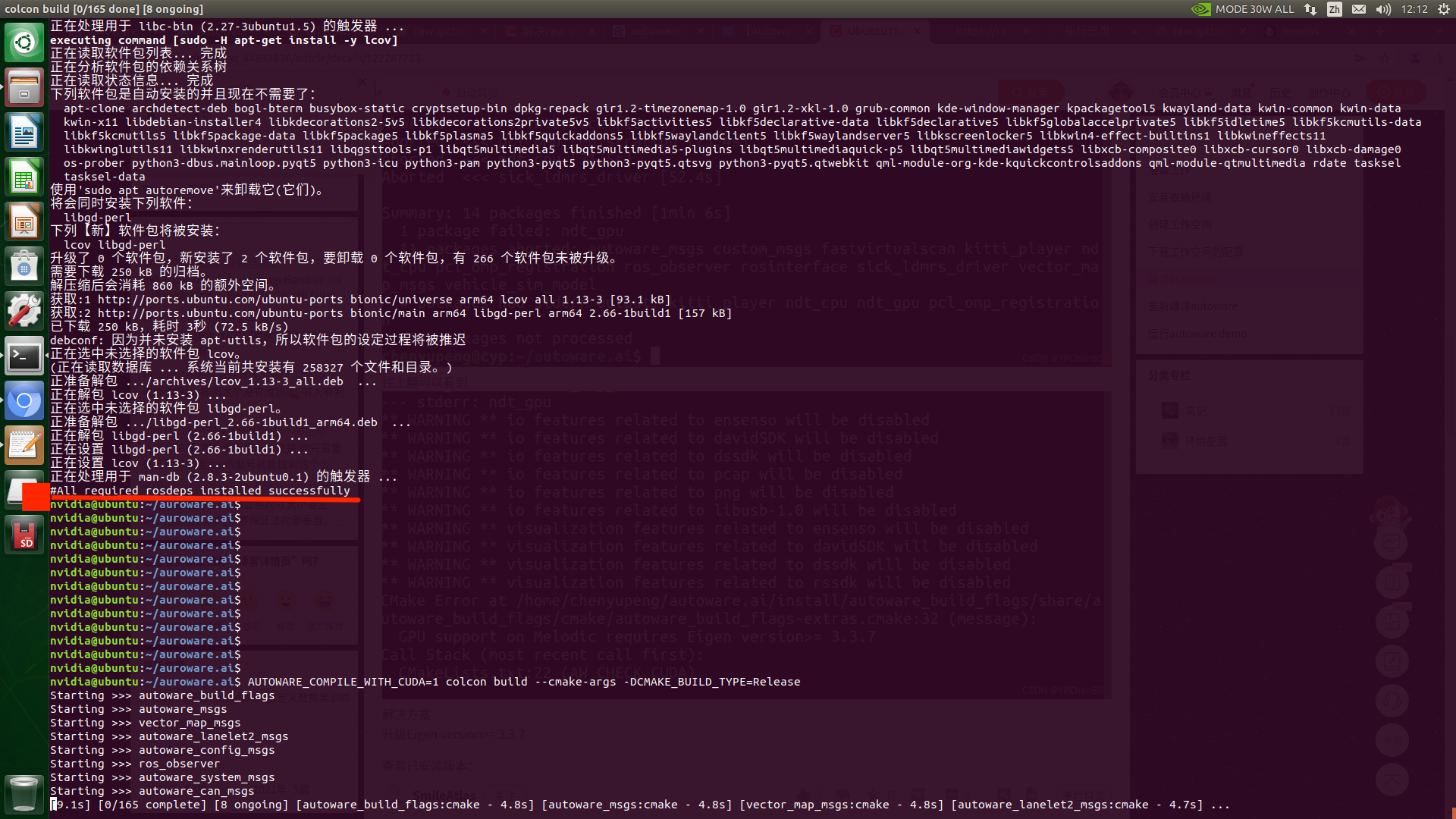
Then enter the following command.
xxxxxxxxxx#If you have a graphics card, use the following command:AUTOWARE_COMPILE_WITH_CUDA=1 colcon build ~-cmake-args -DCMAKE_BUILD_TYPE=Release#If you don’t have a graphics card, use the following command:colcon build ~-cmake-args -DCMAKE_BUILD_TYPE=Release