Autoware.ai track navigation
Navigate using NOT positioning and track lines
It needs to be connected to a real car to receive 16-line lidar data before it can be used normally.
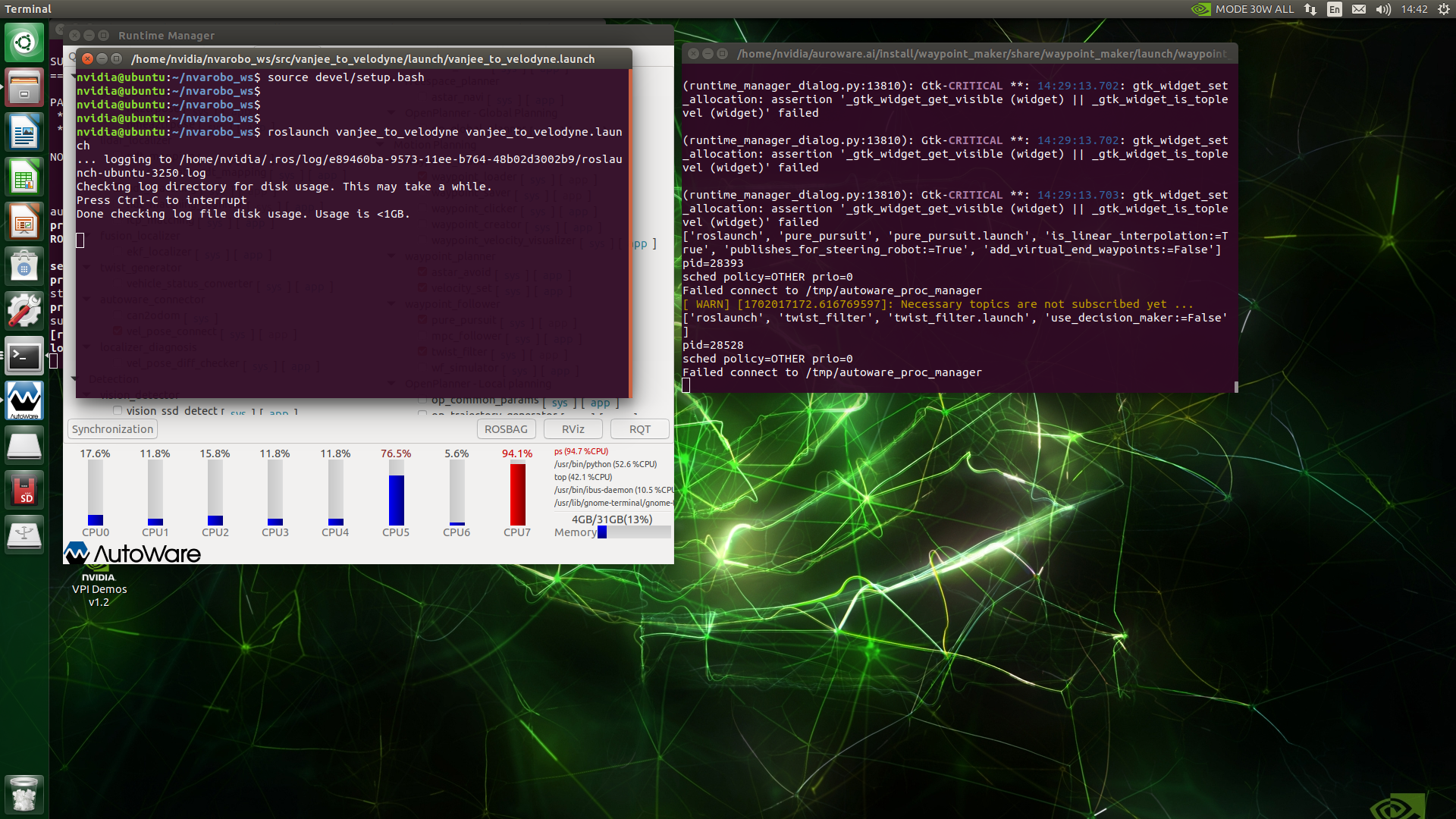
We enter the workspace of the vehicle chassis created in the previous tutorial, open the terminal and enter the following command:
source deve/setup.bashroslaunch vanjee_to_velodyne vanjee_to_velodyne.launch
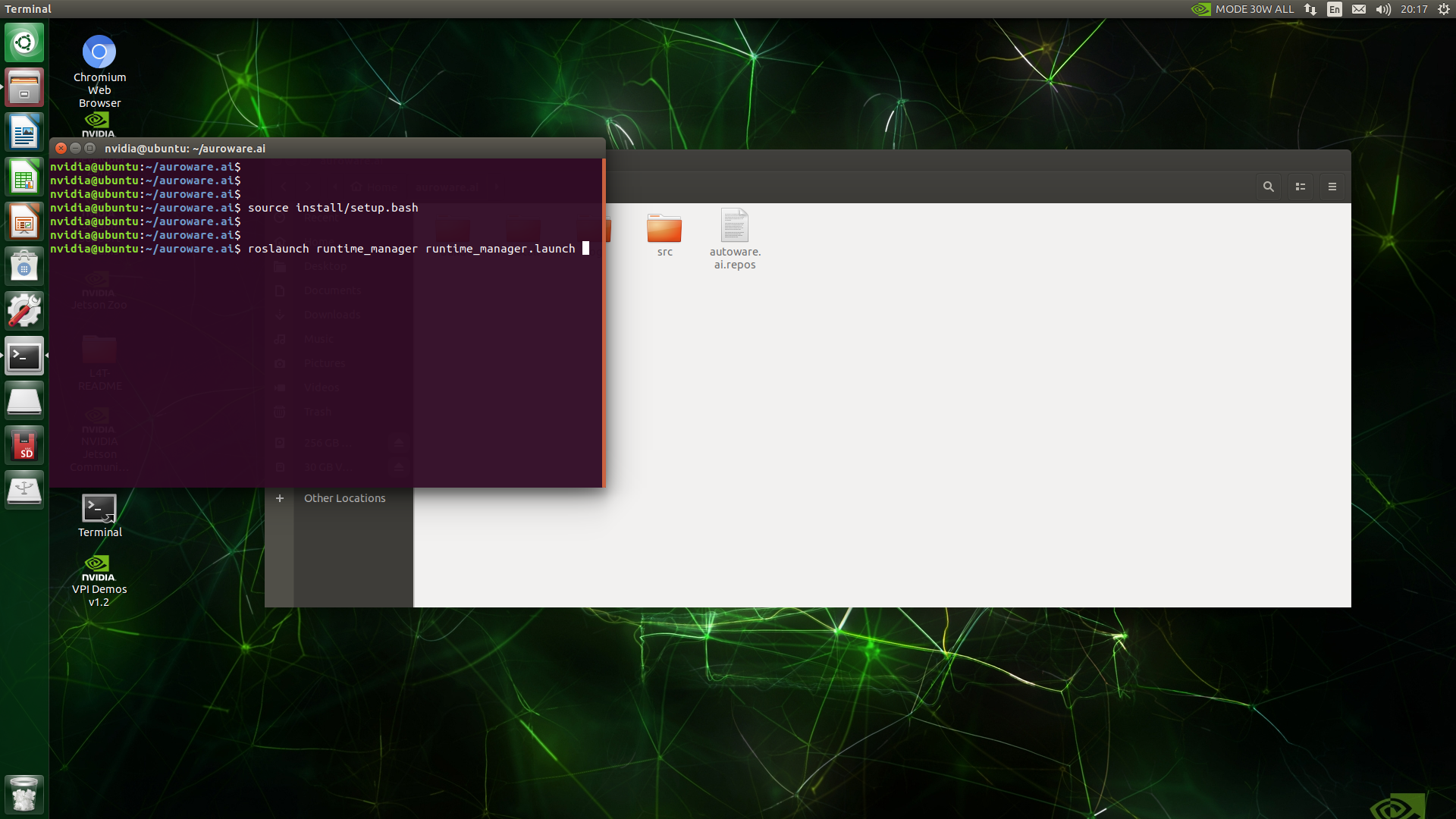
Enter the workspace of autoware.ai, right-click to open the terminal, enter the command in the terminal and press the Enter key.
xxxxxxxxxxsource install/setup.bashroslaunch runtime_manager runtime_manager.launch
Then follow the steps below.
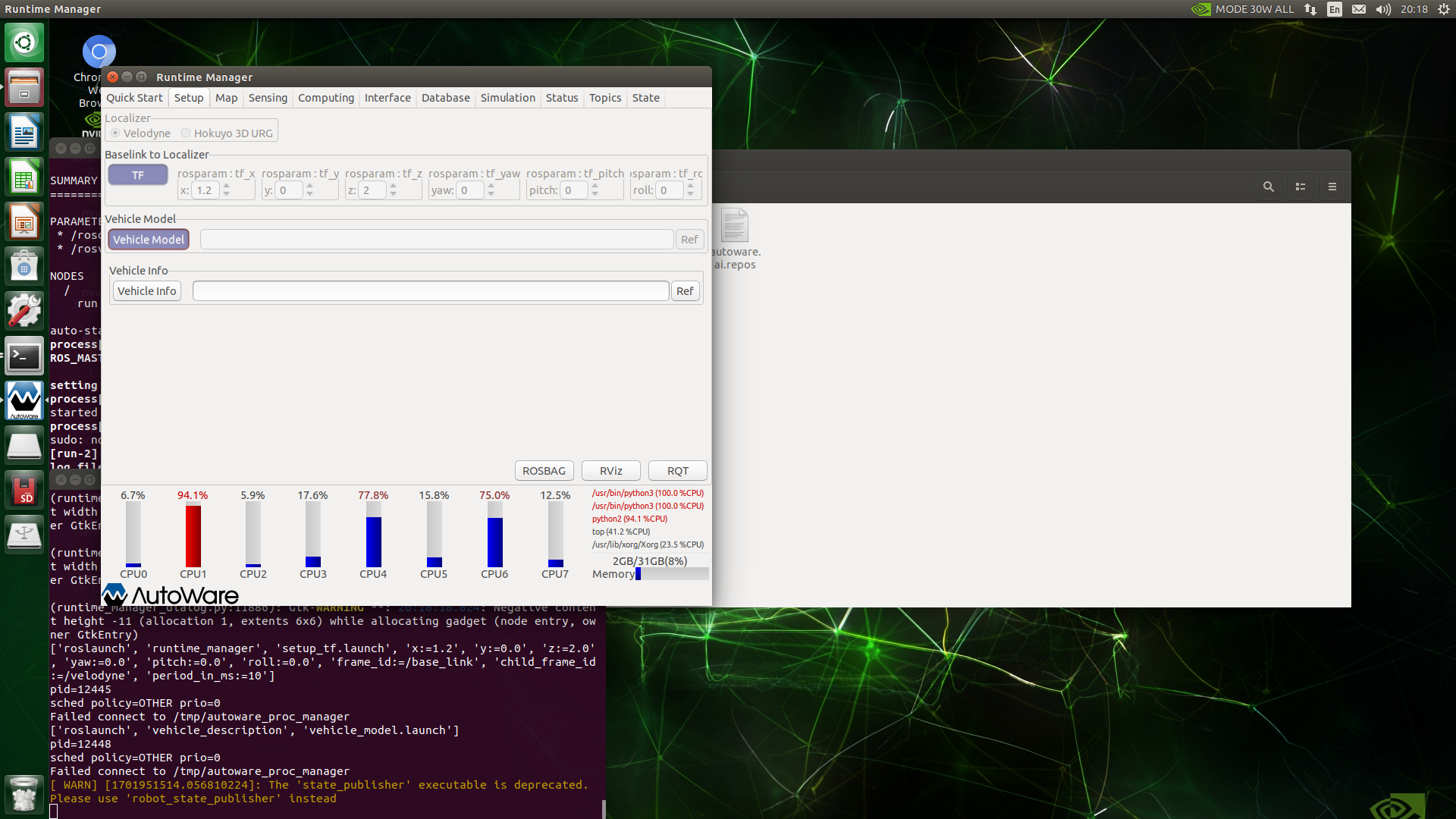
Under the Setup page of autoware, make sure that Velodyne is selected for Localizer, set the x, y, z, yaw, pitch, and roll values of Baselink to Localizer, which are the relative positional relationship between the radar center point and the center point of the rear axle of the vehicle body, and then click TF button, and finally click the Vehicle Model button. If it is empty, a default model will be loaded.
Under the Map page of autoware, click the Ref button to the right of TF to load the launch file with the following path, which is the tf transformation from the /world coordinate system to the /map coordinate system, and finally click TF button.
xxxxxxxxxxautoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/tf_local.launch
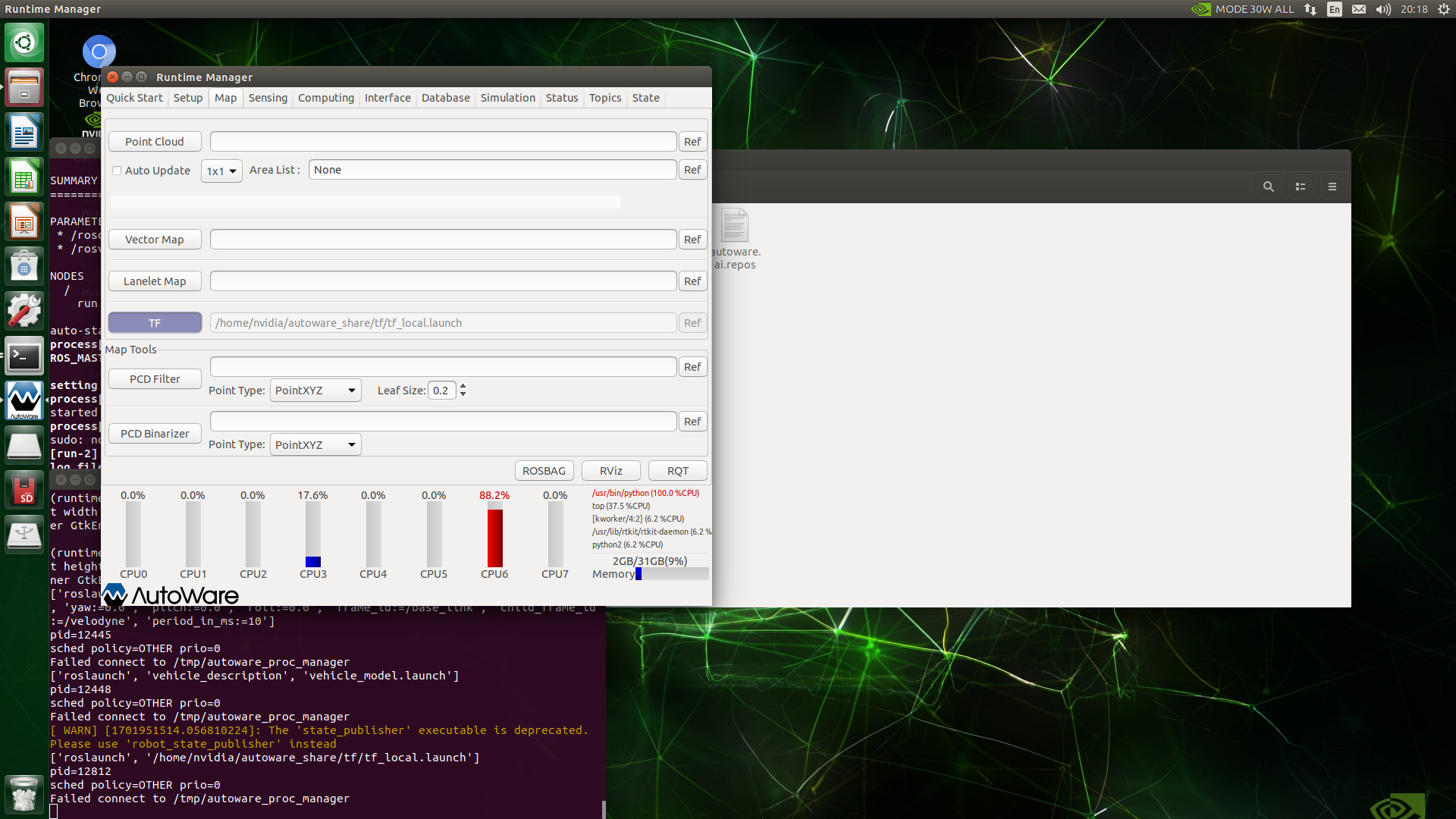
Open the Map menu of autoware, click the Ref button to the right of the Point Cloud button, load the .pcd file you just saved, and click the Point Cloud button. If the progress bar shows OK, the loading is complete, as shown below.

Under the Sensing page of autoware, check voxel_grid_filter.
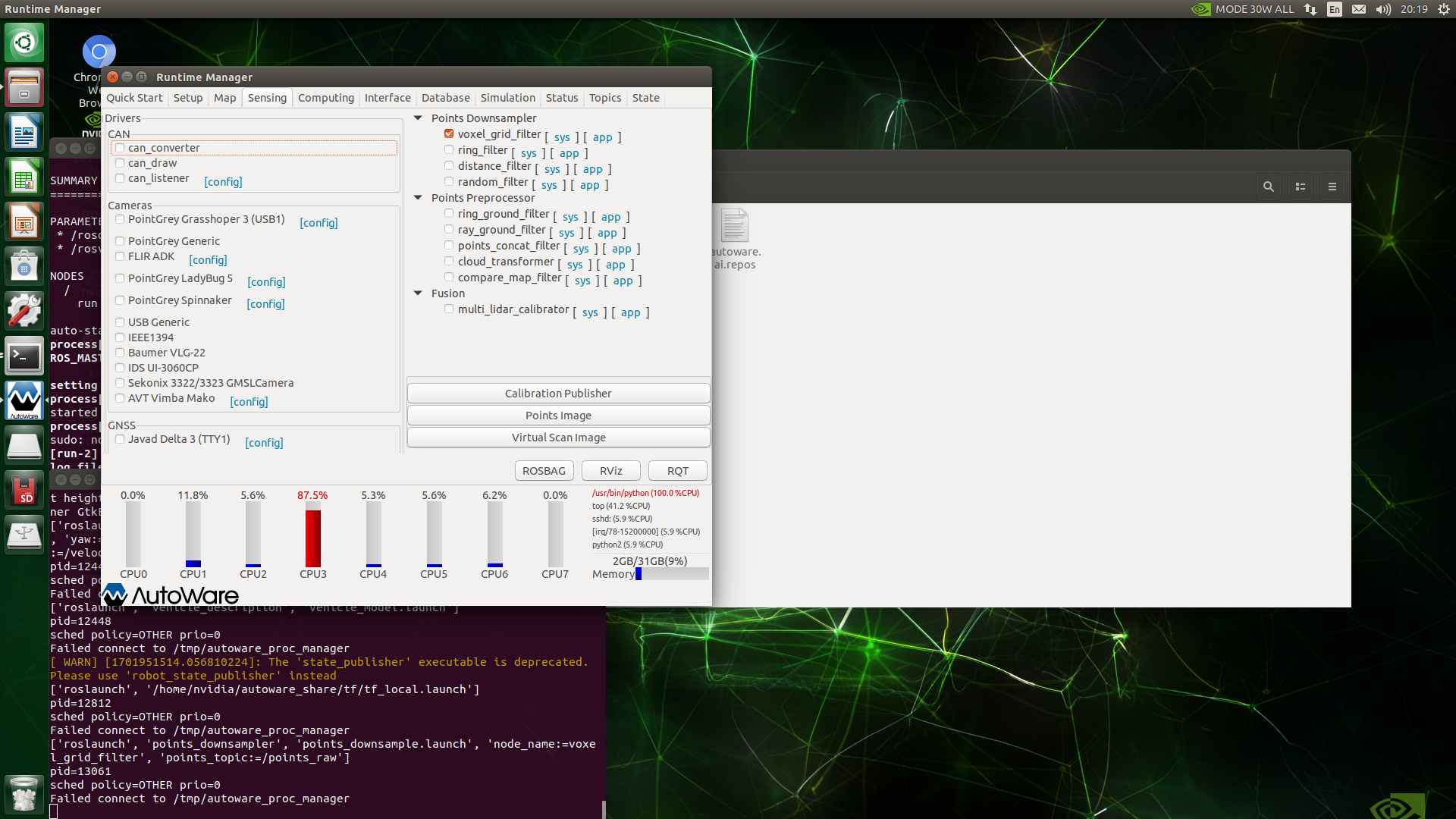
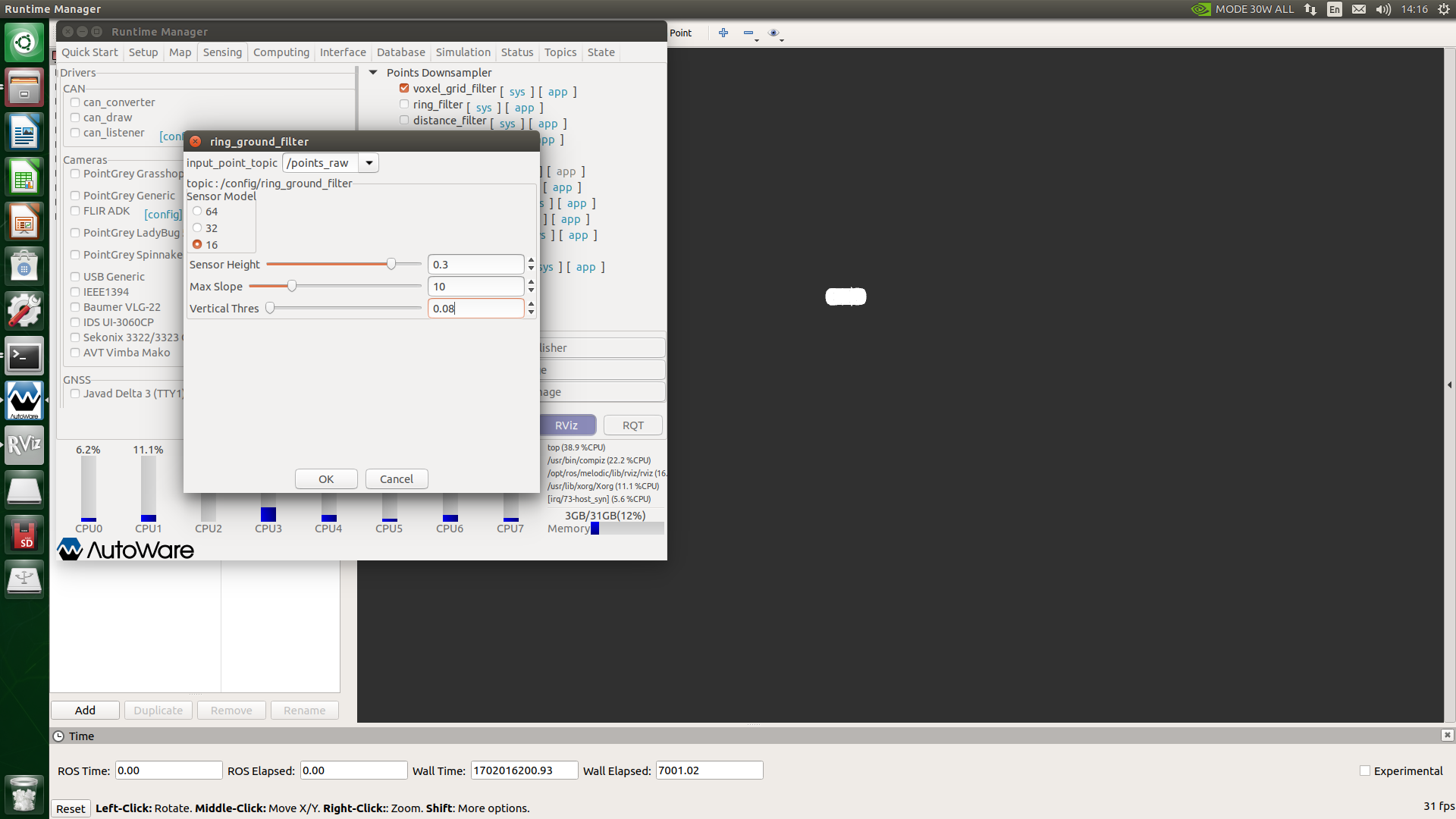
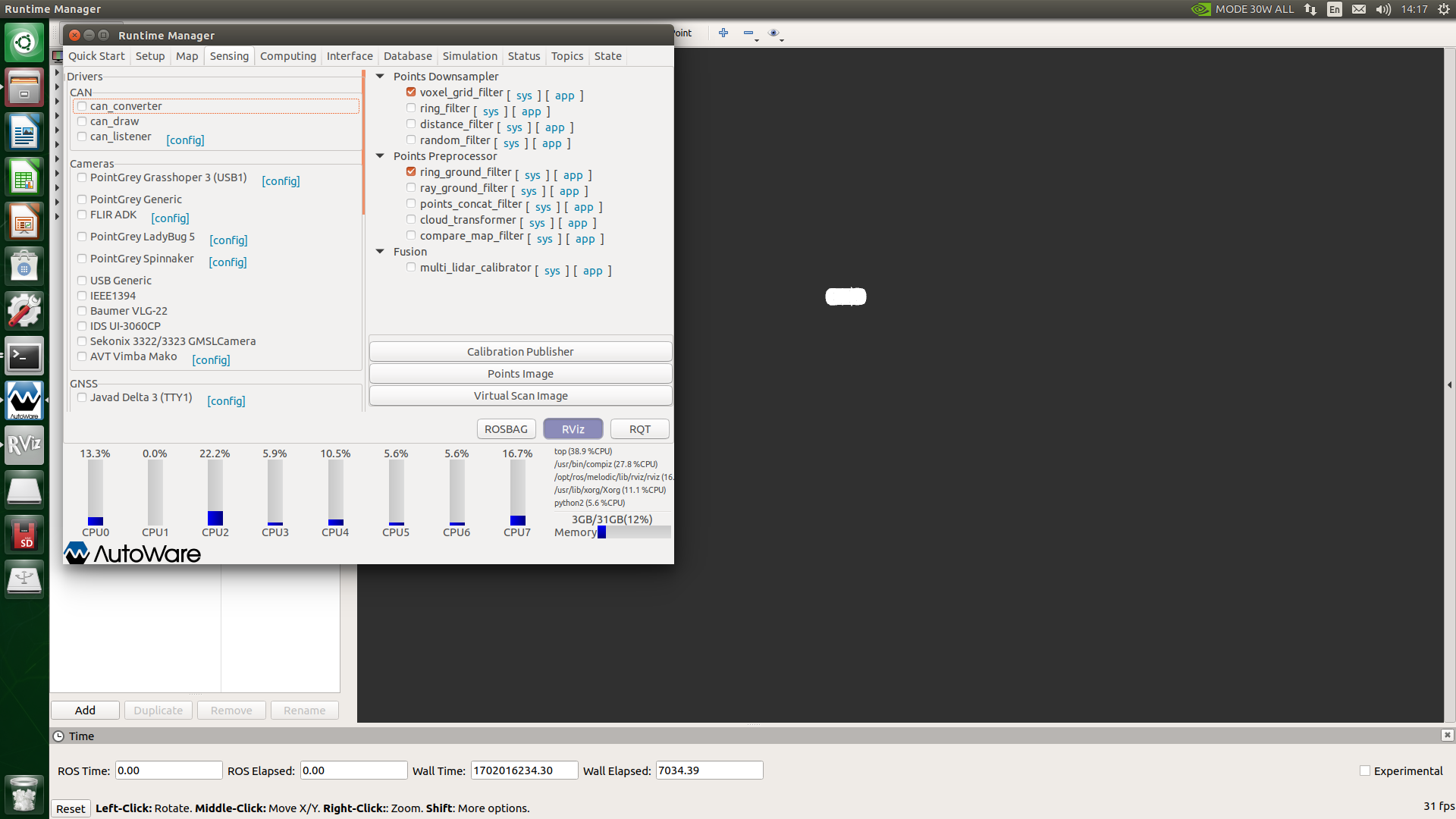
On the Sensing page, the first one under Points Preprocessor is ring_ground_filter. Its function is to filter lidar data and distinguish between ground and non-ground radar data. Click the app button on the right side of ring_ground_filter to set the point cloud topic in the pop-up interface. The name input_point_topic is /points_raw. The Sensor Model is the number of lidar scanning lines.VANJEE radar is a 16-line radar, so 16 is selected. The Sensor Height parameter is the height of the lidar from the ground and is set according to the actual situation. The Max Slope parameter is the maximum slope, which is greater than This value will be recognized as non-ground data. Vertical Thres represents the difference between the obstacle and the ground. If it is greater than this value, it is considered an obstacle. After setting the parameters, click OK to exit, and finally check ring_ground_filter.
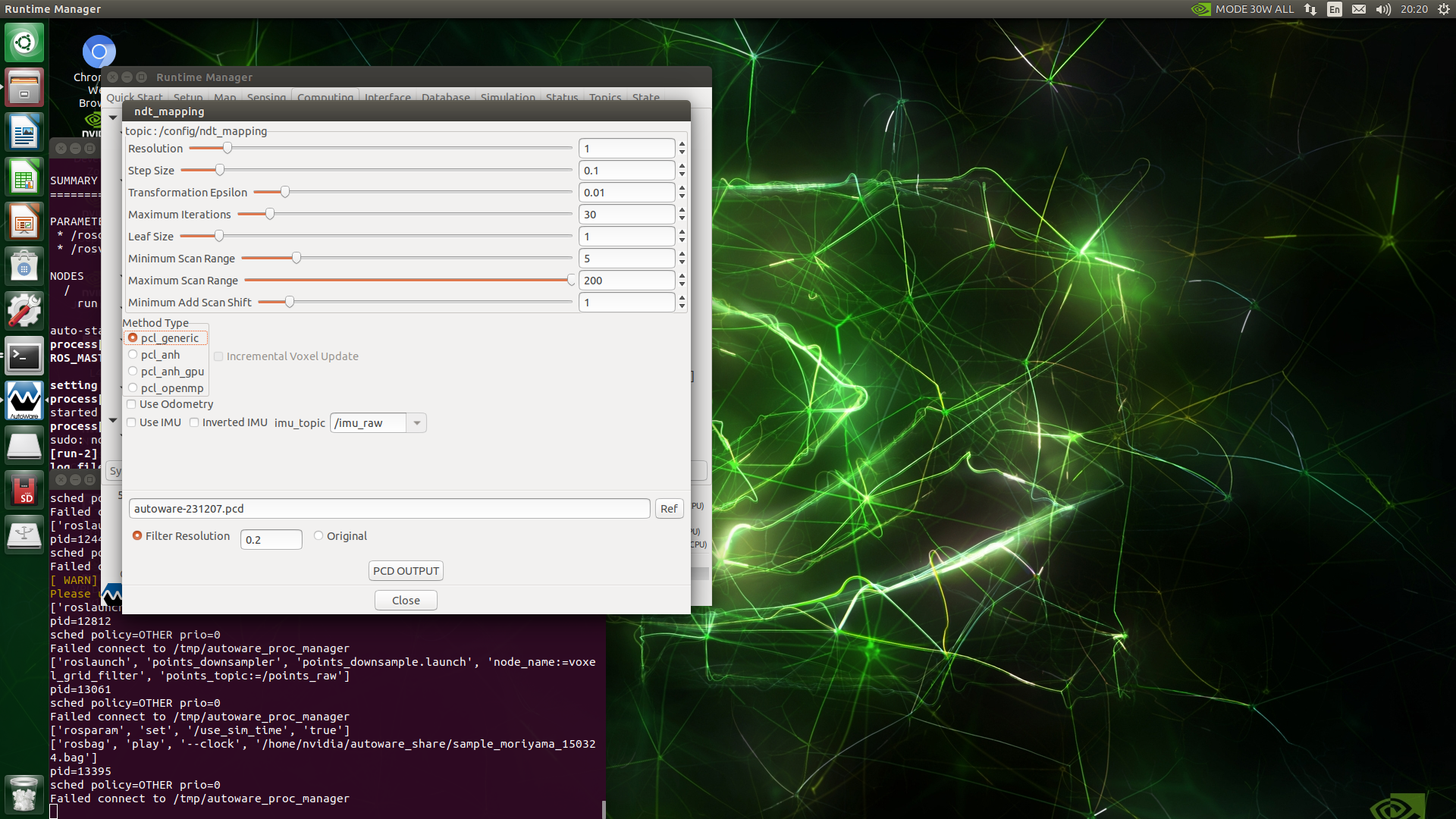
Under the Computing page of autoware, click the app button to the right of nat_matching under lidar_localizer. Use the default parameters. If there is a GPU, select pcl_anh_gpu for the Method Type, that is, use the GPU for construction. Graph calculation, if there is no GPU, select ppl_generic, click the Close button, and finally check nat_matching.
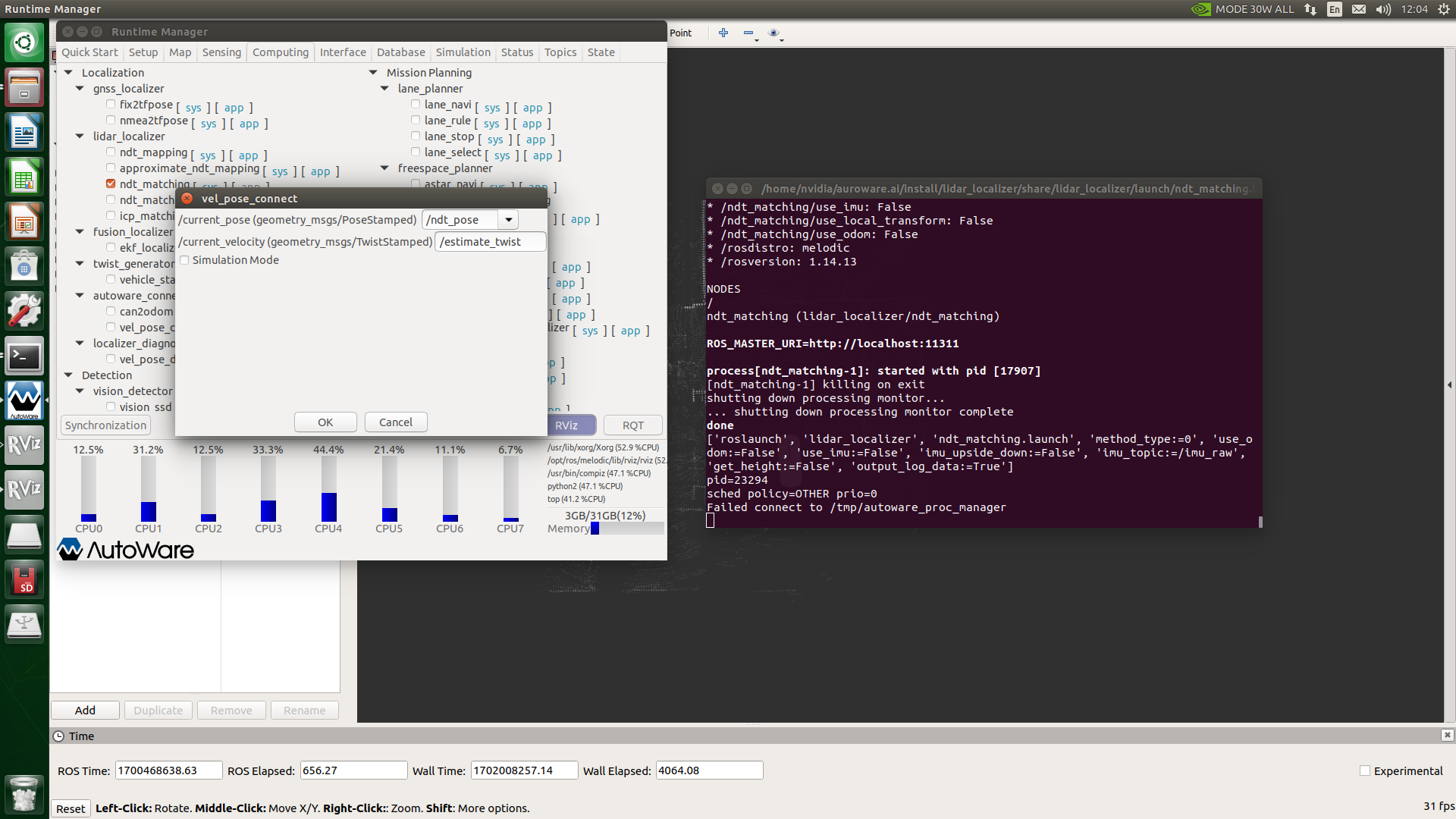
Under the Computing page of autoware, click the app button on the right side of vel_pose_connect under autoware_connector. Use the default parameters. We are locating online so there is no need to check Simulation Mode. Click the ok button. Finally check vel_pose_connect.
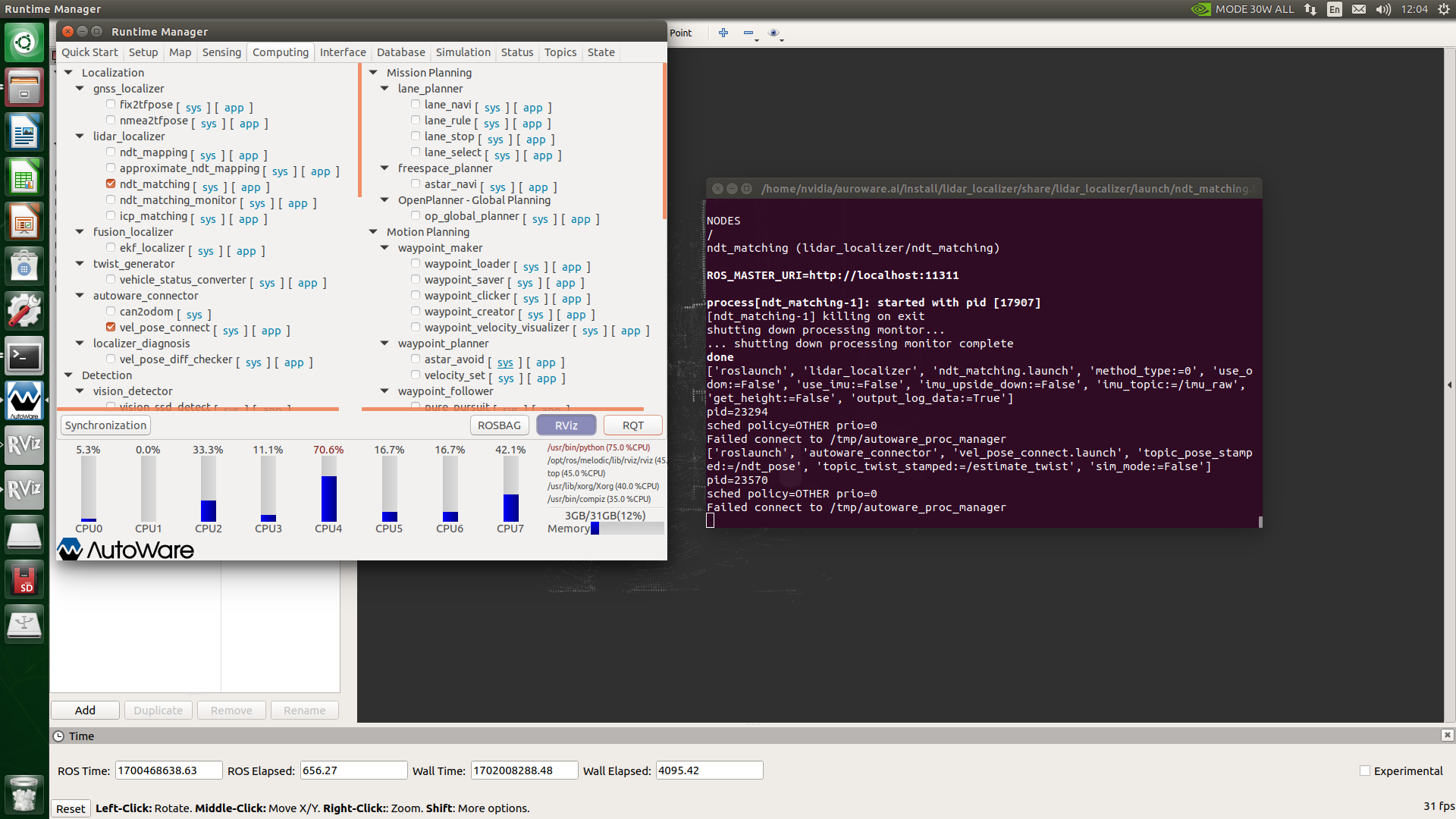
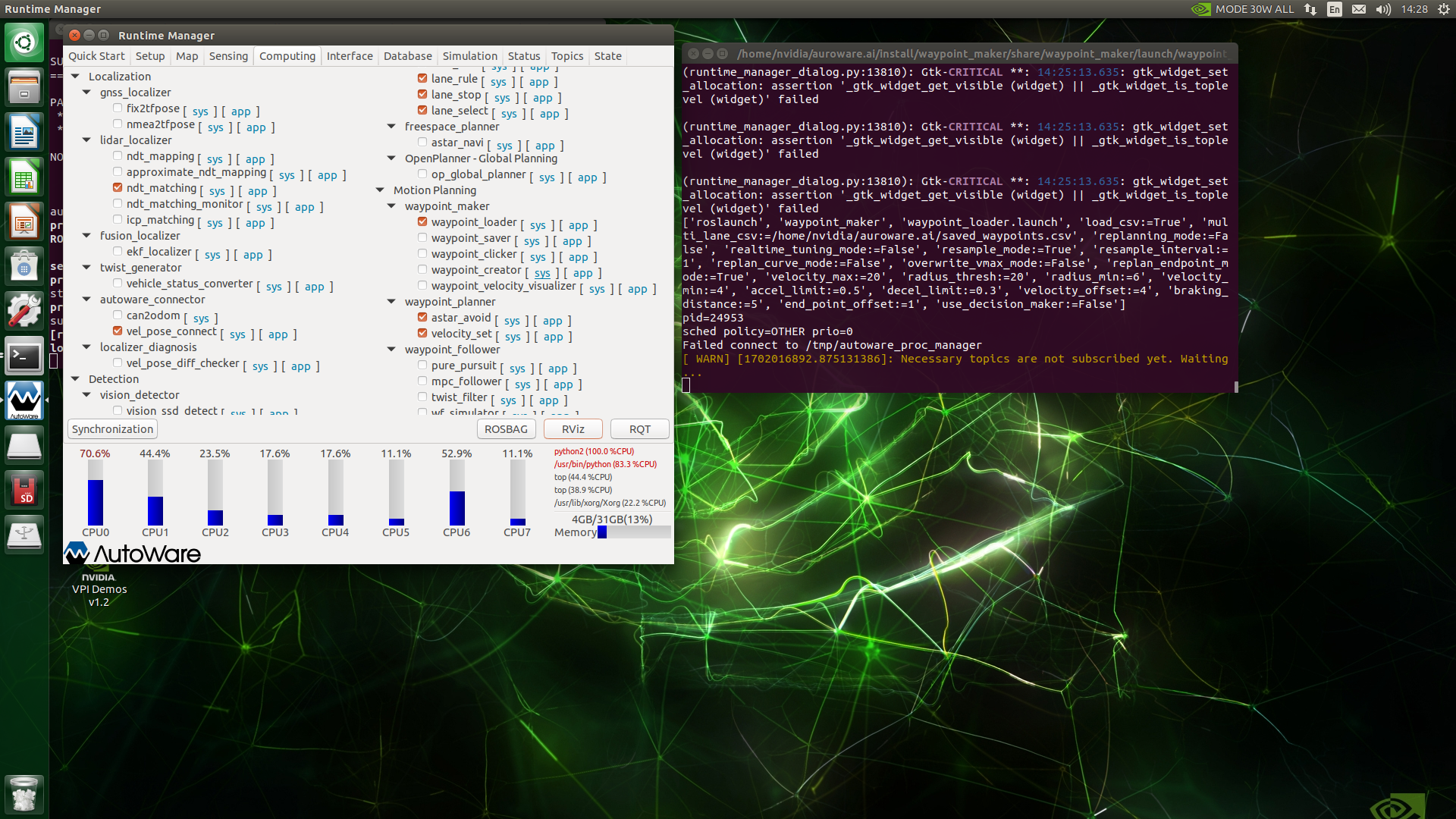
On the right side of the Computing page of autoware, you can see lane_planner under Mission Planning. Click to check lane_rule, lane_stop, and lane_select. These parameters can be kept as default. As shown below.
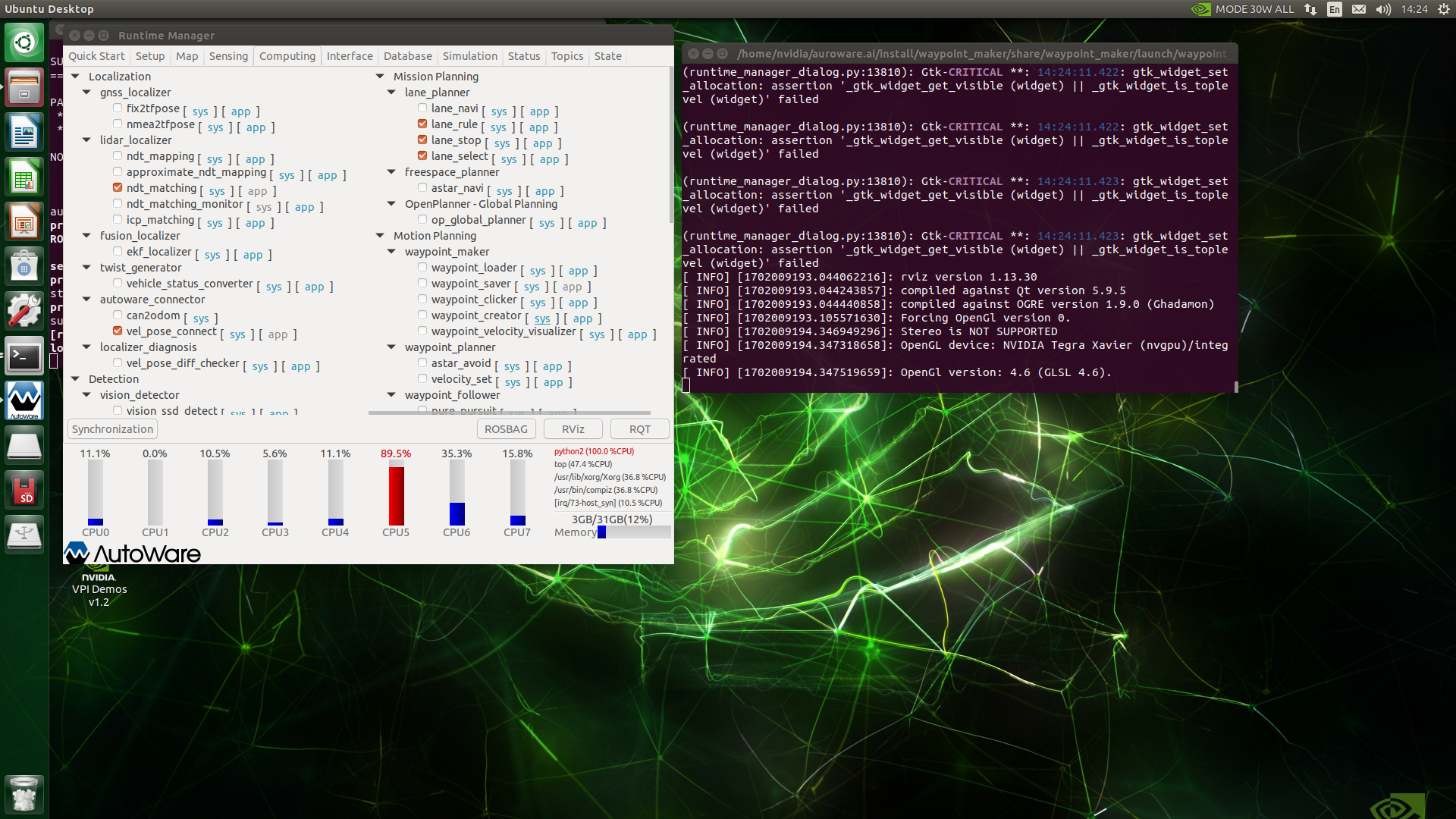
On the right side of the Computing page of autoware, you can see waypoint_planner under Motion Planning, check astar_avold and `velocity_set respectively, and leave the parameters as default, as shown in the figure below.

On the right side of the Computing page of autoware, click the app button on the right side of waypoint_loader under waypoint_maker, and click the Ref button in the pop-up interface to load the track point file recorded in the previous recording track point tutorial. , click the OK button and check waypoint_loader.

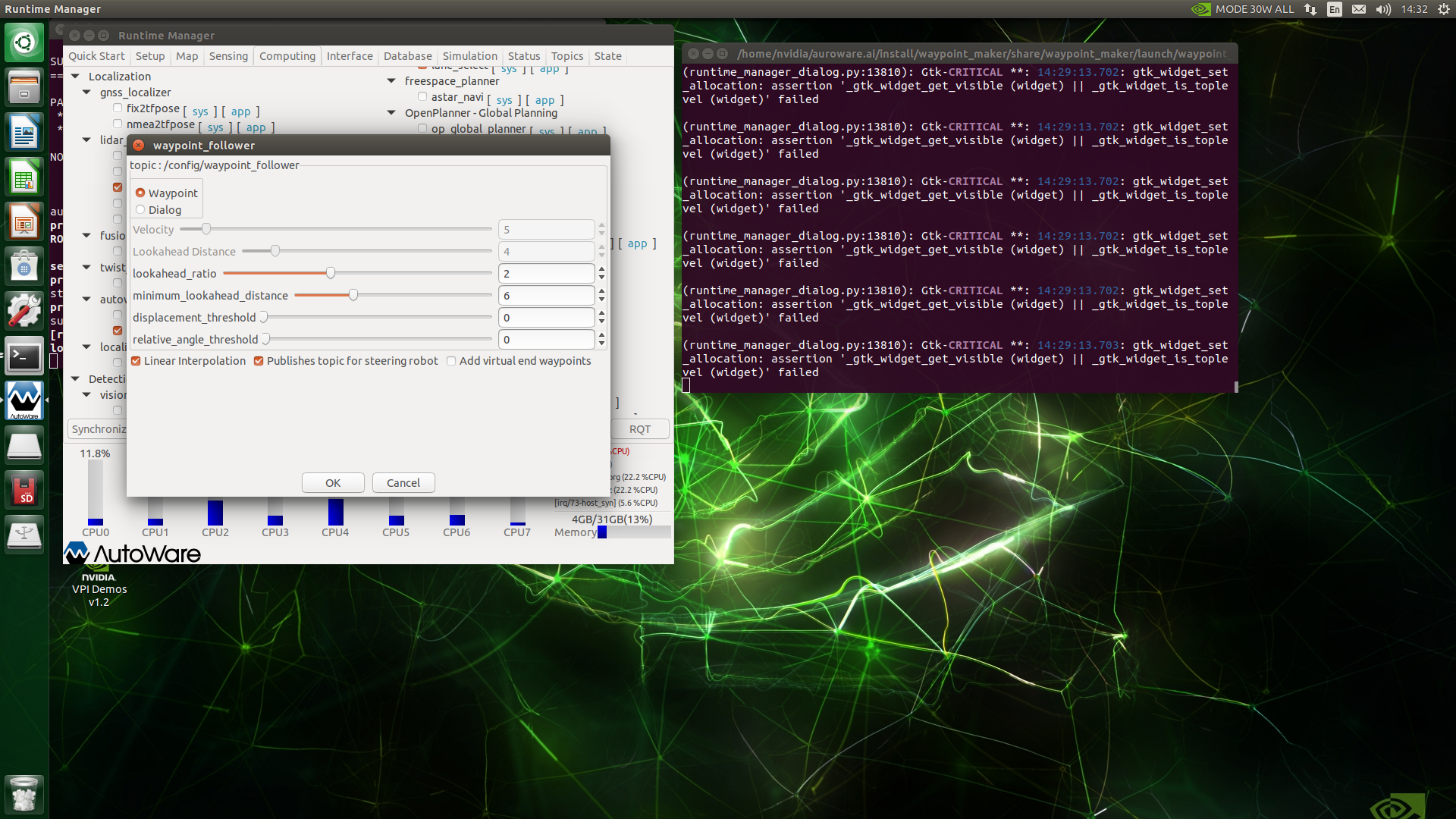
On the right side of the Computing page of autoware, you can see waypoint_follower under Motion Planning. Click the app button on the right side of pure_puesuit, and the following interface will pop up. When the waypoint following speed is selected as Waypoint, it is the speed recorded in the track point file. When Dialog is selected , you can manually set the car speed through the parameters below. Click the OK button and check pure_puesuit. Then check twist_filter and the default will be fine.

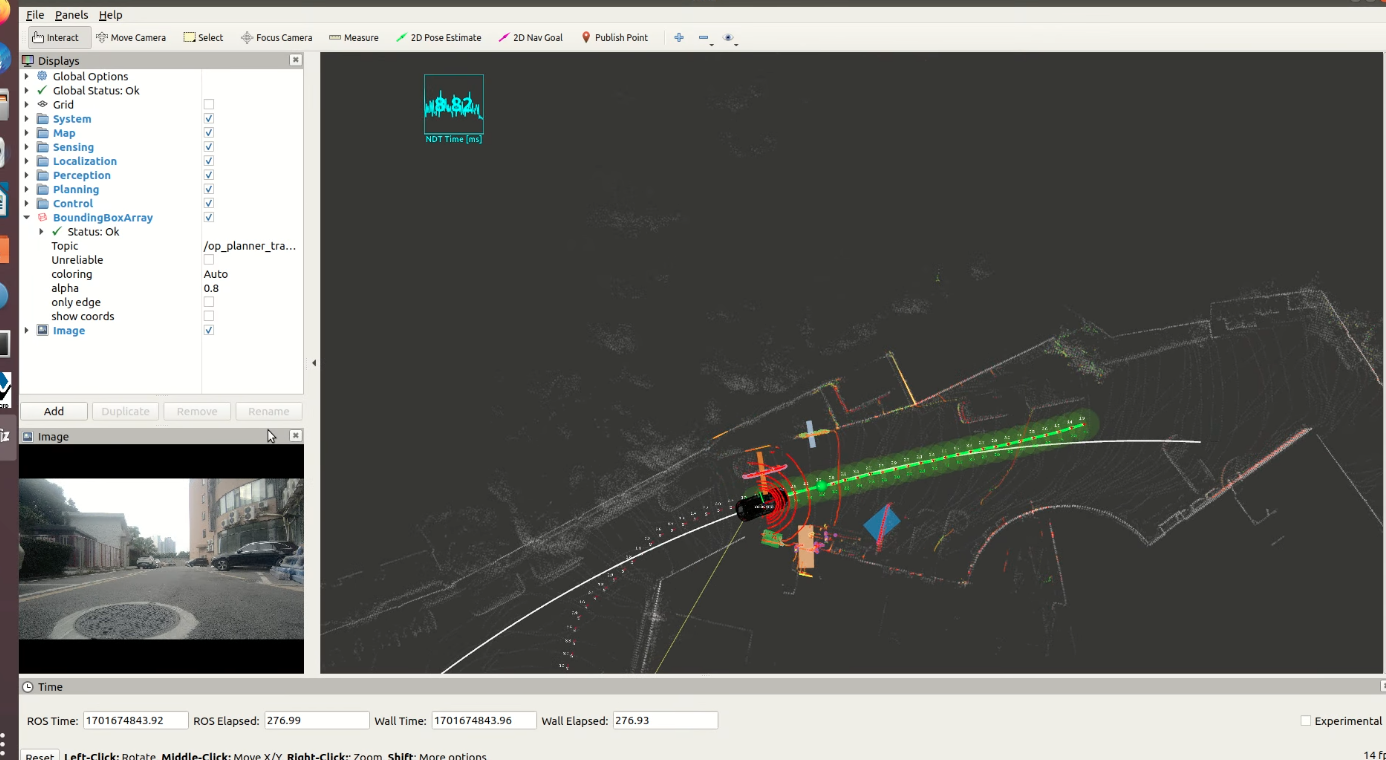
The navigation results are as shown below: