Robot handle control
Note: The ROS_DOMAIN_ID of the Raspberry Pi and the microROS control board need to be consistent. You can check [MicroROS Control Board Parameter Configuration] to set the microROS control board ROS_DOMAIN_ID. Check the tutorial [Connect MicroROS Agent] to determine whether the IDs are consistent.
1. Program function description
The car is connected to the agent, the receiver of the handle is connected to the Raspberry Pi 5 port, and the program is run, and the car movement, buzzer and gimbal servo can be controlled by remote control.
2. Start and connect to the agent
After successfully starting the Raspberry Pi, enter the following command to start the agent.
sh ~/start_agent_rpi5.sh
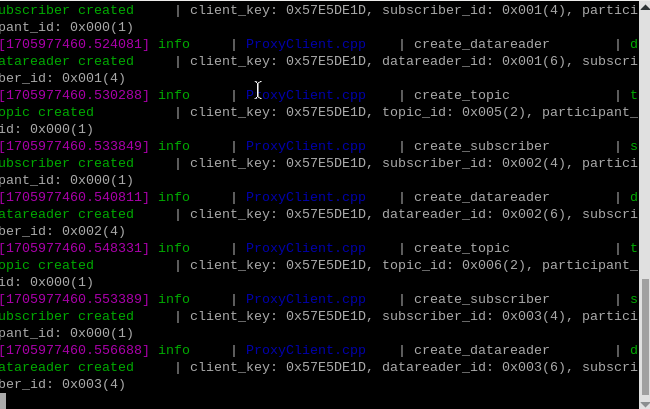
Then, turn on the car switch and wait for the car to connect to the agent. The connection is successful, as shown in the figure below.
3. Enter the car docker
Open another terminal and enter the following command to enter docker.
xxxxxxxxxxsh ros2_humble.sh
When the following interface appears, you have successfully entered docker. Now you can control the car through commands.

Enter the following command in the terminal to check whether the controller is mounted normally.
xxxxxxxxxxls /dev/input*
When this interface appears, it means it was successfully mounted.

4. Start the handle control program
Because the handle control function has been automatically activated at boot, if we need to manually enable handle control, we need to turn off the auto-start process at boot.
Terminal input command:
xxxxxxxxxxps -A
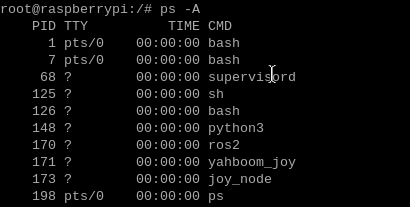
You can see that the processes of the handle control node and the handle node are 171 and 173. Turn off these two processes to manually start the handle control.
xxxxxxxxxxkill -9 171kill -9 173
Manually open the handle control program.
x
#Handle remote control car programros2 launch yahboomcar_ctrl yahboom_joy_launch.py
The remote control button description is as follows:
Left rocker: valid in the front and rear directions, controls the car forward and backward, invalid in the left and right directions
Right joystick: valid in left and right directions, controls the car to rotate left and right, invalid in forward and backward directions
START key: buzzer control
Y key: control the S2 servo upward
A key: control the S2 servo down
X key: control the S1 servo to the left
B key: control the S1 servo to the right
R1 key: handle control speed switch. After pressing it, you can use the remote control to control the speed of the car. Press it again to lose the handle control speed. It is also a gameplay switch. Press it to stop. Press it again to continue running the functional gameplay program, including radar. Obstacle avoidance, radar guard and more.
MODE key: Switch modes and use the default mode. After switching modes, if the key value is incorrect, the program will exit with an error.
5、Node communication diagram
Enter the following command in the terminal.
xxxxxxxxxxros2 run rqt_graph rqt_graph
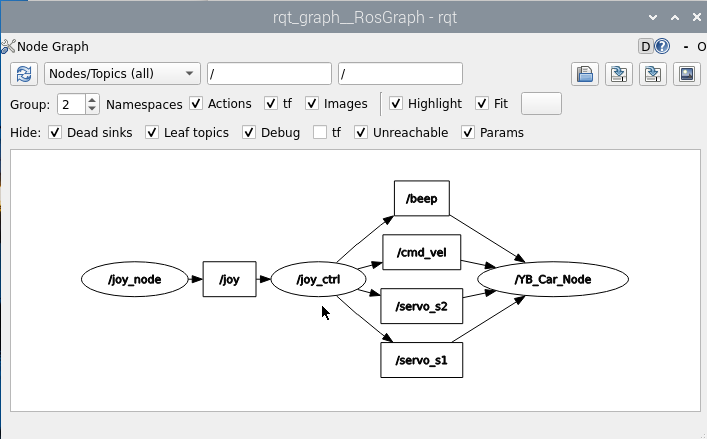
If it is not displayed at first, select [Nodes/Topics(all)], and then click the refresh button in the upper left corner.
6、Code analysis
Source code reference path.
xxxxxxxxxx/root/yahboomcar_ws/src/yahboomcar_ctrl/launch
yahboom_joy_ launch.py
xfrom launch import LaunchDescriptionfrom launch_ros.actions import Node
def generate_launch_description(): node1 = Node( package='yahboomcar_ctrl', executable='yahboom_joy', ) node2 = Node( package='joy', executable='joy_node', ) launch_description = LaunchDescription([node1,node2]) return launch_description
Two nodes are running, namely, the yahboom_ctrl handle control node and the joy_node handle key value reading node.
Two node source code reference paths.
xxxxxxxxxx/root/yahboomcar_ws/src/yahboomcar_ctrl/yahboomcar_ctrl
yahboom_joy.py
x
#Create subscriber subscription/joy topic dataself.sub_Joy = self.create_subscription(Joy,'joy', self.buttonCallback,10)
#Create a publisher to publish speed, servo, buzzer topic data and function gameplay switchesself.pub_cmdVel = self.create_publisher(Twist,'cmd_vel',10)self.pub_Buzzer = self.create_publisher(UInt16,"beep", 1)self.pub_JoyState = self.create_publisher(Bool,"JoyState", 10)self.pub_Servo1 = self.create_publisher(Int32,"servo_s1" , 10)self.pub_Servo2 = self.create_publisher(Int32,"servo_s2" , 10)
#Callbackdef buttonCallback(self,joy_data): if not isinstance(joy_data, Joy): return self.user_jetson(joy_data) #Process key function user_jetsondef user_jetson(self, joy_data): #cancel nav if joy_data.buttons[7] == 1: self.cancel_nav() #Buzzer if joy_data.buttons[11] == 1: b = UInt16() self.Buzzer_active = not self.Buzzer_active b.data = self.Buzzer_active self.pub_Buzzer.publish(b) #Gear adjustment, press the rocker to adjust the gear xlinear_speed = self.filter_data(joy_data.axes[1]) * self.xspeed_limit * self.linear_Gear angular_speed = self.filter_data(joy_data.axes[2]) * self.angular_speed_limit * self.angular_Gear if xlinear_speed > self.xspeed_limit: xlinear_speed = self.xspeed_limit elif xlinear_speed < -self.xspeed_limit: xlinear_speed = -self.xspeed_limit if angular_speed > self.angular_speed_limit: angular_speed = self.angular_speed_limit elif angular_speed < -self.angular_speed_limit: angular_speed = -self.angular_speed_limit twist = Twist() twist.linear.x = xlinear_speed twist.linear.y = 0.0 twist.angular.z = angular_speed #Determine whether the speed can be controlled, that is, whether the R1 key is pressed if self.Joy_active == True: self.pub_cmdVel.publish(twist) #The following is the data for processing the servo control. After pressing it, the angle will increase/decrease by 1. If you continue to press it, the angle will continue to increase and decrease. if not joy_data.buttons[1] == 0: print("Up") self.PWMServo_X += 1 if self.PWMServo_X <= -90: self.PWMServo_X = -90 elif self.PWMServo_X >= 90: self.PWMServo_X = 90 print("self.PWMServo_X: ",self.PWMServo_X) print("self.PWMServo_Y: ",self.PWMServo_Y) servo1_angle = Int32() servo1_angle.data = self.PWMServo_X self.pub_Servo1.publish(servo1_angle)
if not joy_data.buttons[3] == 0: print("Down") self.PWMServo_X -= 1 if self.PWMServo_X <= -90: self.PWMServo_X = -90 elif self.PWMServo_X >= 90: self.PWMServo_X = 90 print("self.PWMServo_X: ",self.PWMServo_X) print("self.PWMServo_Y: ",self.PWMServo_Y) servo1_angle = Int32() servo1_angle.data = self.PWMServo_X self.pub_Servo1.publish(servo1_angle)
if not joy_data.buttons[0] == 0: print("Left") self.PWMServo_Y -= 1 if self.PWMServo_Y <= -90: self.PWMServo_Y = -90 elif self.PWMServo_Y >= 20: self.PWMServo_Y = 20 servo2_angle = Int32() servo2_angle.data = self.PWMServo_Y self.pub_Servo2.publish(servo2_angle) print("self.PWMServo_X: ",self.PWMServo_X) print("self.PWMServo_Y: ",self.PWMServo_Y)
if not joy_data.buttons[4] == 0: print("Right") self.PWMServo_Y += 1 if self.PWMServo_Y <= -90: self.PWMServo_Y = -90 elif self.PWMServo_Y >= 20: self.PWMServo_Y = 20 servo2_angle = Int32() servo2_angle.data = self.PWMServo_Y self.pub_Servo2.publish(servo2_angle) print("self.PWMServo_X: ",self.PWMServo_X) print("self.PWMServo_Y: ",self.PWMServo_Y)7. Variables corresponding to remote control key values
Based on the default mode [Controller], the key values corresponding to the remote control are as follows.
| remote control event | Corresponding variable |
|---|---|
| Left joystick up | axes[1]=1 |
| Left joystick down | axes[1]=-1 |
| Right joystick to left | axes[2]=1 |
| Right joystick to the right | axes[2]=-1 |
| Button X pressed | button[3]=1 |
| ButtonB pressed | button[1]=1 |
| Button Y pressed | button[4]=1 |
| Button R1 pressed | button[7]=1 |
| Button start pressed | button[11]=1 |
| Left joystick pressed | button[13]=1 |
| Right joystick pressed | button[14]=1 |
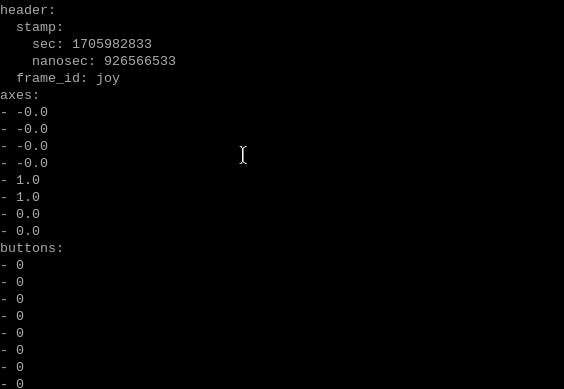
Combined with the above source code for easy understanding, when these values change, it means that the remote control is pressed and the corresponding program can be executed. To view other buttons, you can subscribe to the /joy topic. Enter the following command in the terminal.
xxxxxxxxxxros2 topic echo /joy