Face detection
1. Face detection
MediaPipe is an open source data stream processing machine learning application development framework developed by Google. It is a graph-based data processing pipeline for building and using multiple forms of data sources, such as video, audio, sensor data, and any time series data. MediaPipe is cross-platform and can run on embedded platforms (Raspberry Pi, etc.), mobile devices (iOS and Android), workstations and servers, and supports mobile GPU acceleration. MediaPipe provides cross-platform, customizable ML solutions for real-time and streaming media. The core framework of MediaPipe is implemented in C++ and provides support for languages such as Java and Objective C. The main concepts of MediaPipe include Packet, Stream, Calculator, Graph and Subgraph.
Features of MediaPipe:
- End-to-end acceleration: Built-in fast ML inference and processing accelerates even on commodity hardware.
- Build once, deploy anywhere: Unified solution for Android, iOS, desktop/cloud, web and IoT.
- Ready-to-use solutions: cutting-edge ML solutions that showcase the full capabilities of the framework.
- Free and open source: frameworks and solutions under Apache2.0, fully extensible and customizable.
2. Dlib
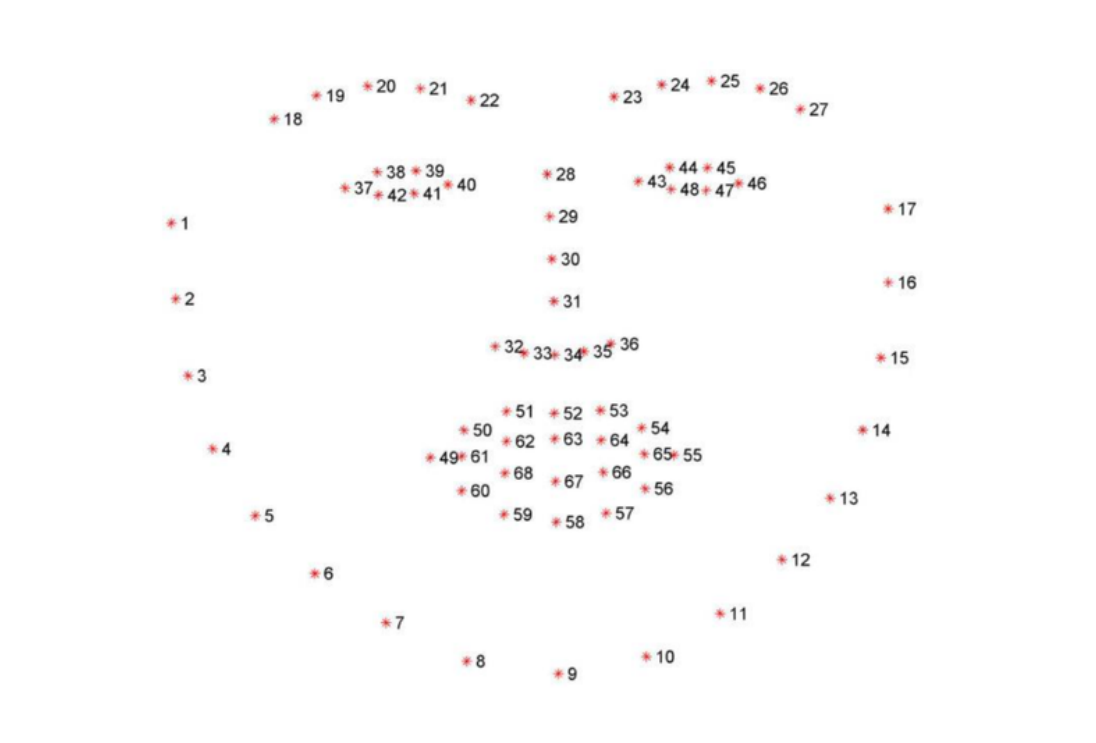
DLIB is a modern C++ toolkit containing machine learning algorithms and tools for creating complex software in C++ to solve real-world problems. It is widely used by industry and academia in fields such as robotics, embedded devices, mobile phones, and large-scale high-performance computing environments. The dlib library uses 68 points to mark important parts of the face, such as 18-22 points marking the right eyebrow, and 51-68 points marking the mouth. Use the get_frontal_face_detector module of the dlib library to detect faces, and use the shape_predictor_68_face_landmarks.dat feature data to predict face feature values.
3. Face detection
3.1 Startup
Input command:
roscorerosrun yahboomcar_mediapipe 04_FaceMesh.py
3.2 Source code
Code path:~/yahboomcar_ws/src/yahboomcar_mediapipe/scripts
x#!/usr/bin/env python3# encoding: utf-8import timeimport rospyimport cv2 as cvimport numpy as npimport mediapipe as mpfrom geometry_msgs.msg import Pointfrom yahboomcar_msgs.msg import PointArray
class FaceMesh: def __init__(self, staticMode=False, maxFaces=2, minDetectionCon=0.5, minTrackingCon=0.5): self.mpDraw = mp.solutions.drawing_utils self.mpFaceMesh = mp.solutions.face_mesh self.faceMesh = self.mpFaceMesh.FaceMesh( static_image_mode=staticMode, max_num_faces=maxFaces, min_detection_confidence=minDetectionCon, min_tracking_confidence=minTrackingCon ) self.pub_point = rospy.Publisher('/mediapipe/points', PointArray, queue_size=1000) self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=3) self.drawSpec = self.mpDraw.DrawingSpec(color=(0, 255, 0), thickness=1, circle_radius=1)
def pubFaceMeshPoint(self, frame, draw=True): pointArray = PointArray() img = np.zeros(frame.shape, np.uint8) imgRGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB) self.results = self.faceMesh.process(imgRGB) if self.results.multi_face_landmarks: for i in range(len(self.results.multi_face_landmarks)): if draw: self.mpDraw.draw_landmarks(frame, self.results.multi_face_landmarks[i], self.mpFaceMesh.FACEMESH_CONTOURS, self.lmDrawSpec, self.drawSpec) self.mpDraw.draw_landmarks(img, self.results.multi_face_landmarks[i], self.mpFaceMesh.FACEMESH_CONTOURS, self.lmDrawSpec, self.drawSpec) for id, lm in enumerate(self.results.multi_face_landmarks[i].landmark): point = Point() point.x, point.y, point.z = lm.x, lm.y, lm.z pointArray.points.append(point) self.pub_point.publish(pointArray) return frame, img
def frame_combine(slef,frame, src): if len(frame.shape) == 3: frameH, frameW = frame.shape[:2] srcH, srcW = src.shape[:2] dst = np.zeros((max(frameH, srcH), frameW + srcW, 3), np.uint8) dst[:, :frameW] = frame[:, :] dst[:, frameW:] = src[:, :] else: src = cv.cvtColor(src, cv.COLOR_BGR2GRAY) frameH, frameW = frame.shape[:2] imgH, imgW = src.shape[:2] dst = np.zeros((frameH, frameW + imgW), np.uint8) dst[:, :frameW] = frame[:, :] dst[:, frameW:] = src[:, :] return dst
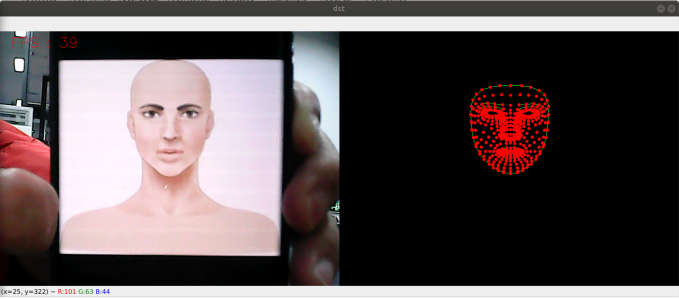
if __name__ == '__main__': rospy.init_node('FaceMesh', anonymous=True) capture = cv.VideoCapture(0) capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G')) capture.set(cv.CAP_PROP_FRAME_WIDTH, 640) capture.set(cv.CAP_PROP_FRAME_HEIGHT, 480) print("capture get FPS : ", capture.get(cv.CAP_PROP_FPS)) pTime, cTime = 0, 0 face_mesh = FaceMesh(maxFaces=2) while capture.isOpened(): ret, frame = capture.read() # frame = cv.flip(frame, 1) frame, img = face_mesh.pubFaceMeshPoint(frame,draw=False) if cv.waitKey(1) & 0xFF == ord('q'): break cTime = time.time() fps = 1 / (cTime - pTime) pTime = cTime text = "FPS : " + str(int(fps)) cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1) dst = face_mesh.frame_combine(frame, img) cv.imshow('dst', dst) # cv.imshow('frame', frame) # cv.imshow('img', img) capture.release() cv.destroyAllWindows()