9. ROS+Opencv application
9. ROS+Opencv application 9.1. Overview 9.2. Use 9.2.1. Start 9.2.2. Display method 9.2.3. Effect display 9.3. Node 9.3.1. edge detection algorithm 9.3.2. Contour moment 9.3.3. Face Recognition
9.1. Overview
wiki: http://wiki.ros.org/opencv_apps
Source code: https://github.com/ros-perception/opencv_apps.git
Most of the code was originally taken from https://github.com/Itseez/opencv/tree/master/samples/cpp
Feature pack: ~/software/library_ws/src/opencv_apps
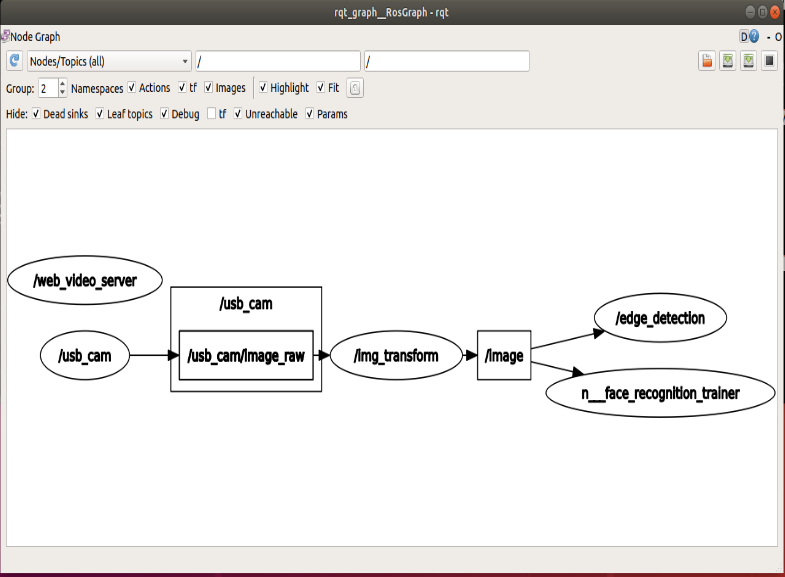
The topic subscribed by this function package is [/image]. What we need to do is to open the camera node, write a node that converts the camera topic into a [/image] node, and publish the [/image] topic.
The path to the node that enables the camera and publishes the [/image] topic:
~/yahboomcar_ws/src/yahboomcar_visual/scripts/pub_image.py The opencv_apps program provides various nodes that run opencv's functions internally and publish the results to a ROS topic. When using the opencv_apps program, according to your own business needs, you only need to run a launch file, so you don't have to write program codes for these functions.
ROS Wiki has related node analysis, topic subscription and topic publishing of corresponding nodes, introduction of related parameters, etc. See the ROS WiKi for details.
9.2. Use
xxxxxxxxxx#Raspberry Pi 5 master needs to enter docker first, please perform this step#If running the script into docker fails, please refer to ROS/07, Docker tutorial~/run_docker.sh9.2.1. Start
Step 1: Start camera
xxxxxxxxxxroslaunch yahboomcar_visual opencv_apps.launch img_flip:=false img_flip parameter: Whether the image needs to be flipped horizontally, the default is false.
The [usb_cam-test.launch] file opens the [web_video_server] node by default, and you can directly use the [IP:8080] webpage to view the image in real time.
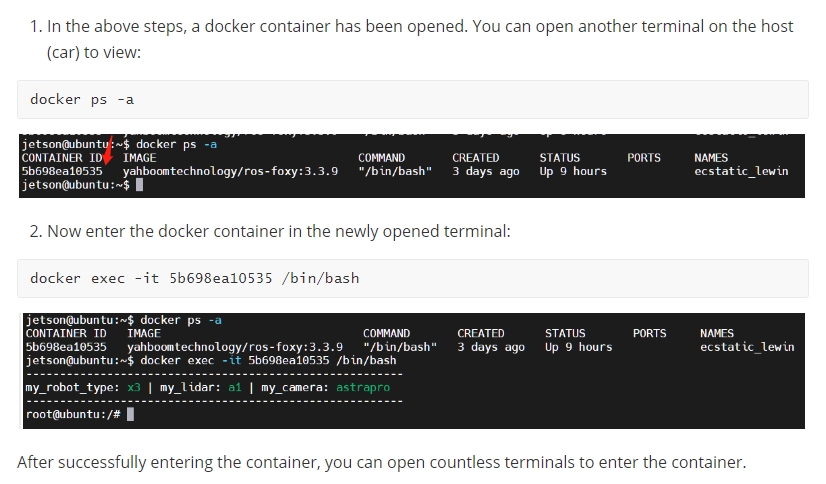
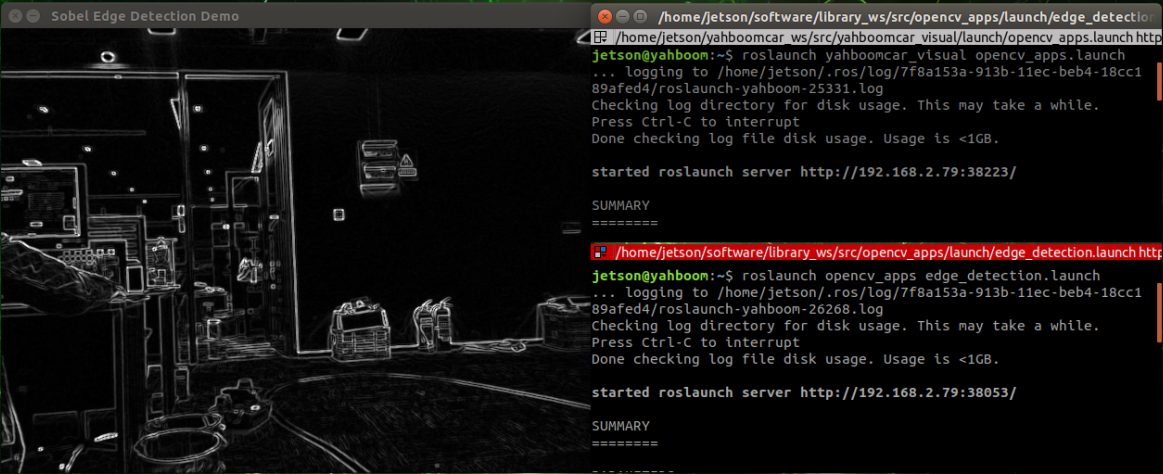
Step 2: Start the function of Opencv_apps
<PI5 needs to open another terminal and enter the same docker container
xxxxxxxxxxroslaunch opencv_apps face_recognition.launch # face recognition roslaunch opencv_apps corner_harris.launch # harris corner detection roslaunch opencv_apps camshift.launch # target tracking algorithm roslaunch opencv_apps contour_moments.launch # contour moments roslaunch opencv_apps convex_hull.launch # polygon outline roslaunch opencv_apps discrete_fourier_transform.launch # discrete Fourier transform algorithm roslaunch opencv_apps edge_detection.launch # edge detection algorithm roslaunch opencv_apps face_detection.launch # face detection algorithm roslaunch opencv_apps fback_flow.launch # Optical flow detection algorithm roslaunch opencv_apps find_contours.launch # contour detection roslaunch opencv_apps general_contours.launch # general contour detection roslaunch opencv_apps goodfeature_track.launch # feature point tracking roslaunch opencv_apps hls_color_filter.launch # HLS color filter roslaunch opencv_apps hough_circles .launch # Hough circle detection roslaunch opencv_apps hough_lines.launch # Hough line detection roslaunch opencv_apps hsv_color_filter.launch # HSV color filter roslaunch opencv_apps lk_flow.launch # LK optical flow algorithm roslaunch opencv_apps people_detect.launch # human detection algorithm roslaunch opencv_apps phase_corr.launch # Phase correlation displacement detection roslaunch opencv_apps pyramids.launch # Image pyramid sampling algorithm roslaunch opencv_apps rgb_color_filter.launch # RGB color filter roslaunch opencv_apps segment_objects.launch # clear background detection algorithm roslaunch opencv_apps simple_flow.launch # Simplified optical flow algorithm roslaunch opencv_apps smoothing.launch # simple filter roslaunch opencv_apps threshold.launch # threshold image processing roslaunch opencv_apps watershed_segmentation.launch # watershed segmentation algorithm Almost every functional case will have a parameter [debug_view], Boolean type, whether to use Opencv to display the picture, which is displayed by default.
Set to [False] if no display is required, for example
xxxxxxxxxxroslaunch opencv_apps contour_moments.launch debug_view:=False However, after this is started, some cases cannot be displayed in other ways, because in the source code, some [debug_view] is set to [False], which will turn off image processing.
9.2.2. Display method
rqt_image_view
Enter the following command to select the corresponding topic
xxxxxxxxxxrqt_image_view opencv
The system defaults to display, no need to do anything.
web viewing
(same as the local area network) Enter IP+port in the browser, for example:
xxxxxxxxxx192.168.2.79:8080 9.2.3. Effect display
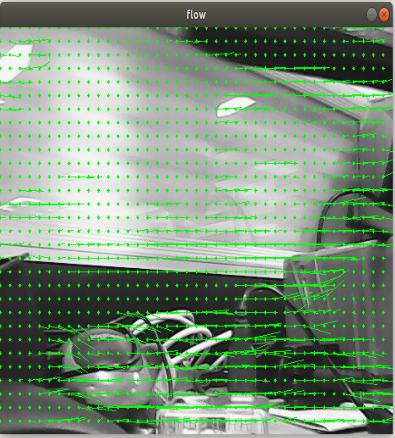
Optical flow detection algorithm
Move the screen and observe the phenomenon.
Feature point tracking

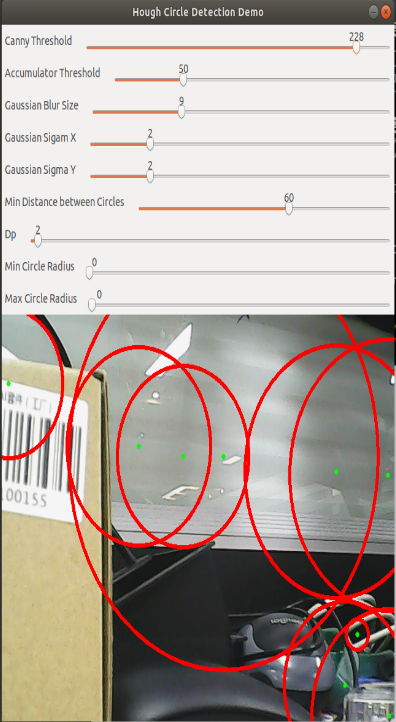
Hough circle detection
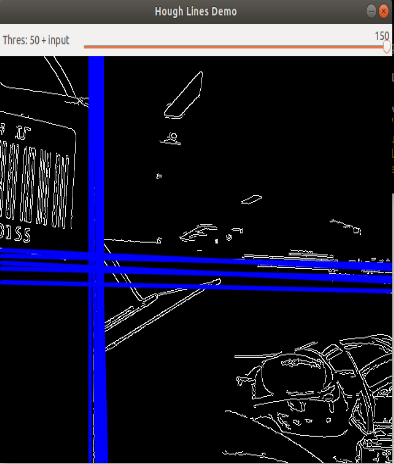
Hough Line Detection
The lower the threshold, the more lines, and the easier the picture gets stuck.
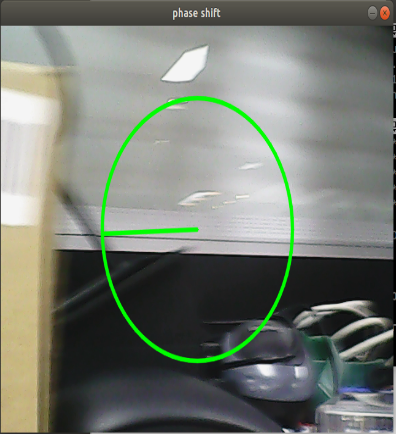
Phase-dependent displacement detection
The faster the camera moves, the larger the radius of the circle.
watershed segmentation algorithm
Use the mouse to select different objects, and the system will automatically distinguish them.

9.3. Node
Each case in this section will have a topic of subscribing to images and publishing images.
9.3.1. edge detection algorithm
| parameter | type | default | Parse |
|---|---|---|---|
| ~use_camera_info | bool | true | Subscribe to the topic [camera_info] to get the default coordinate system ID, otherwise use the image information directly. |
| ~debug_view | bool | false | whether to create a window to display the node image |
| ~edge_type | int | 0 | Specify the edge detection method: 0: Sobel operator, 1: Laplacian operator, 2: Canny edge detection |
| ~canny_threshold1 | int | 100 | Specify the second canny threshold |
| ~canny_threshold2 | int | 200 | Specify the first canny threshold |
| ~apertureSize | int | 3 | The aperture size of the Sobel operator. |
| ~apply_blur_pre | bool | True | whether to apply blur() to the input image |
| ~ postBlurSize | double | 3.2 | Enter the image aperture size |
| ~apply_blur_post | bool | False | whether to apply GaussianBlur() to the input image |
| ~L2gradient | bool | False | Parameters of canny |
| ~queue_size | int | 3 | queue size |
9.3.2. Contour moment
| parameter | type | default | Parse |
|---|---|---|---|
| ~use_camera_info | bool | true | Subscribe to the topic [camera_info] to get the default coordinate system ID, otherwise use the image information directly. |
| ~debug_view | bool | false | whether to create a window to display the node image |
| ~canny_low_threshold | int | 0 | Canny edge detection low threshold |
| ~queue_size | int | 3 | queue size |
9.3.3. Face Recognition
This case is self-training and real-time recognition through real-time collection of human images, and the steps are slightly complicated.
| parameter | type | default | Parse |
|---|---|---|---|
| ~approximate_sync | bool | false | Subscribe to the topic [camera_info] to get the default coordinate system ID, otherwise use the image information directly. |
| ~queue_size | int | 100 | Queue size for subscribing to topics |
| ~model_method | string | "eigen" | Methods of face recognition: "eigen", "fisher" or "LBPH" |
| ~use_saved_data | bool | true | Load training data from ~data_dir path |
| ~save_train_data | bool | true | Save the training data to the ~data_dir path for retraining |
| ~data_dir | string | "~/opencv_apps/face_data" | Save training data path |
| ~face_model_width | int | 190 | width of training face images |
| ~face_model_height | int | 90 | height of training face images |
| ~face_padding | double | 0.1 | Fill ratio for each face |
| ~model_num_components | int | 0 | The number of components of the face recognizer model (0 is considered unlimited) |
| ~model_threshold | double | 8000.0 | face recognition model threshold |
| ~lbph_radius | int | 1 | Radius parameter (only for LBPH method) |
| ~lbph_neighbors | int | 8 | Neighborhood parameter (only for LBPH method) |
| ~lbph_grid_x | int | 8 | grid x parameter (only for LBPH method) |
| ~lbph_grid_y | int | 8 | grid y parameter (only for LBPH method) |
| ~queue_size | int | 100 | Image subscriber queue size |
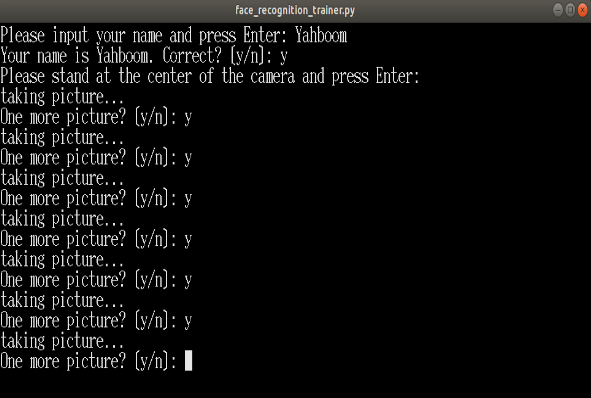
Steps:
First, enter the character name after the colon in the following figure: Yahboom
Confirm the name: y
Then place the face in the center of the image and click OK.
Add a photo cyclically: y, click OK.
To end the image collection, enter: n, and click OK.
Close the launch file and restart.
If you need to enter the recognized recognition, cycle 1 to 5 in turn, until all recognition personnel are completed, and then perform the sixth step.
Step 3: To ensure that the face can be recognized
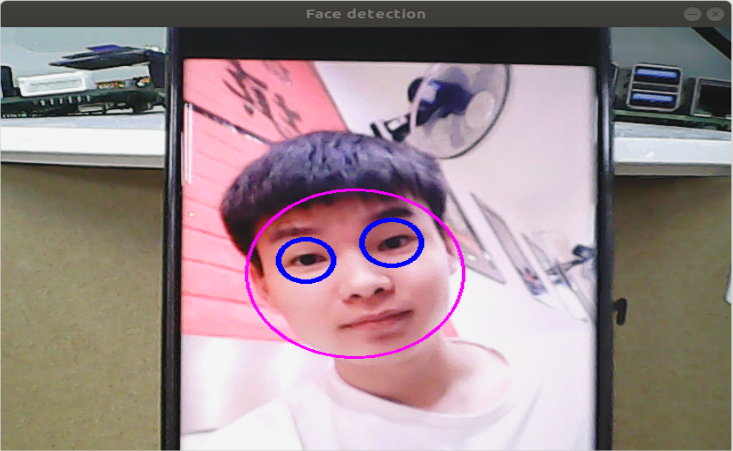
The final recognition effect
