1. Introduction of voice module
1. Introduction of voice module 1.1. Introduction to the voice module 1.1.1. CSK4002 chip 1.2. Using the voice module 1.2.1. Wiring 1.2.2. Wake-up word 1.2.3. Command words 2. Voice control module port binding 2.1. Bind the device of the ROS expansion board2.2. bind the device of the voice board2.3. Test2.4. Notes
1.1. Introduction to the voice module
1.1.1. CSK4002 chip
The voice control module on ROSMASTER is developed based on the CSK4002 chip. CSK4002 is an AISoC with higher performance, better computing power, lower power consumption and designed for the AloT field. It can be widely used in smart home, smart home appliances, and emerging consumer electronics industries.
CSK4002 adopts Andes D1088 core, and its AI/DSP acceleration module MVA supports a variety of Neural Network operators and vector operations, and is deeply adapted to iFLYTEK AI algorithms, with a computing power of up to 128GOPS.
Comes with 8M Flash, 8M PSRAM, 1M SRAM.
Supports 8 channels of PDM audio input and 16 channels of I2S Audio Input data processing.
Integrated rich mainstream peripheral interfaces: GPIO/UART/I2C/SPI/QSPI/SDIO/USB1.1/SDIO, etc.
Equipped with low-latency embedded operating system Free RTOS, complete BSP driver, and complete development tool resources.
1.2. Using the voice module
1.2.1. Wiring
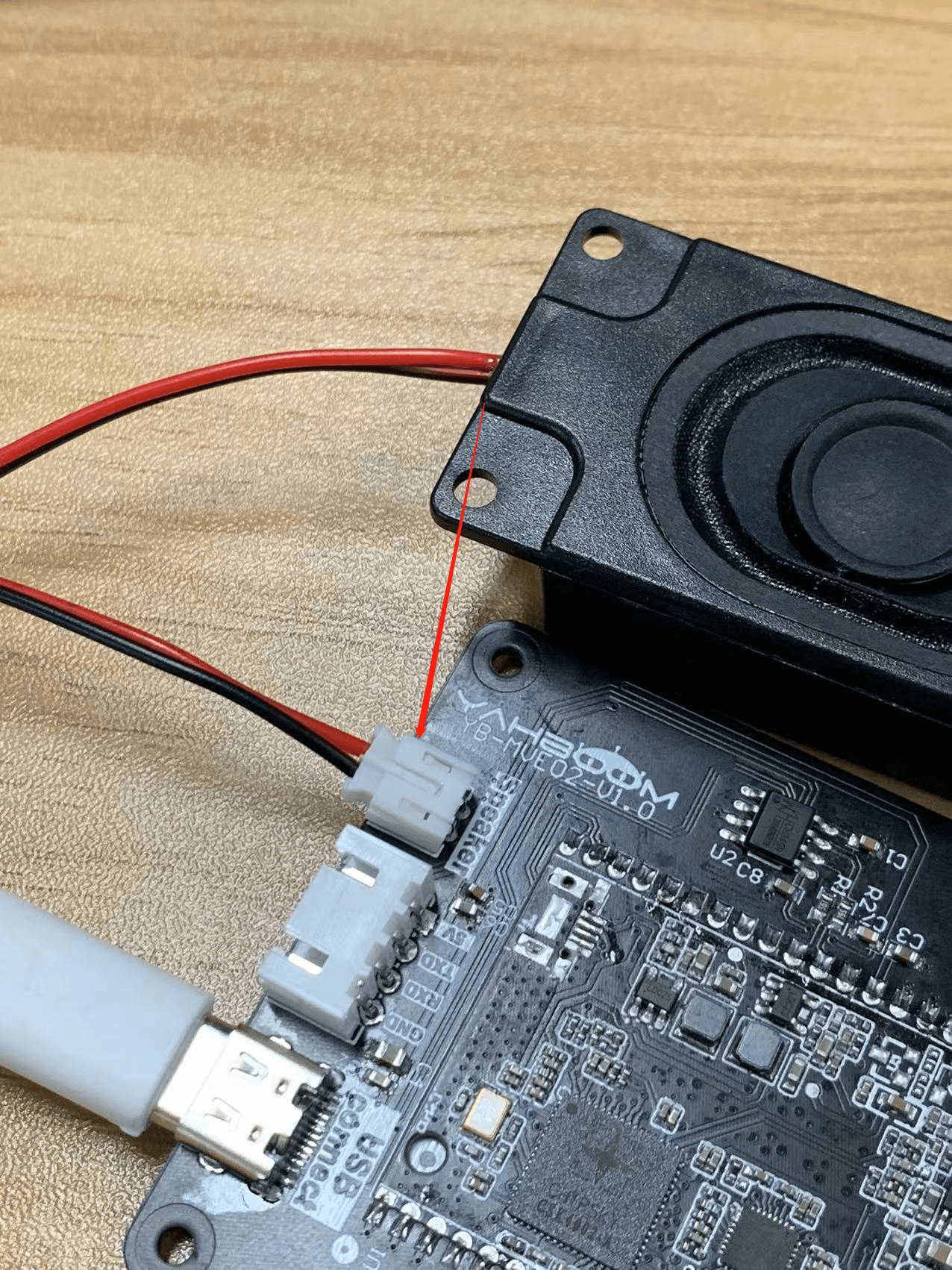
The module is connected to the ROSMASTER robot (or HUB board) through a Type-c data cable, and the speaker and the module are connected through a PH2.0 data cable.
As shown below, one end of the Micro-USB data cable is connected to the "Program" port of the module, and the other end is connected to the port of the ROSMASTER main control board ( after this is plugged in, it cannot be modified after the rear port is bound). About this, please check the next course).

As shown below, the PH2.0 data cable port is connected to the Speaker port on the module.
1.2.2. Wake-up word
The wake-up word is "Hi, Yahboom". When you wake up, you need to slow down your speech rate. If it is too fast, the module will not recognize it. After the module is woken up, other command words can be recognized later.
Within 20 seconds of waking up, you don't need to wake up again, just say the command word directly.
1.2.3. Command words
1.Voice control car movement
| speech recognition content | The voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| Robot stop | $B002# | $A002# | OK , I'm stop. |
| Go ahead | $B004# | $A004# | OK , let's go. |
| Back | $B005# | $A005# | OK , I‘m back. |
| Turn left | $B006# | $A006# | OK , I‘m turning left. |
| Turn right | $B007# | $A007# | OK , I‘m turning right. |
| Enter A mode | $B008# | $A008# | OK, I‘m working on A mode. |
| Enter B mode | $B009# | $A009# | OK, I‘m working on B mode. |
2.Voice control RGB light strip effect
| speech recognition content | The voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| Close light | $B010# | $A010# | OK, light is closed. |
| Red light up | $B011# | $A011# | OK, red light is on. |
| Green light up | $B012# | $A012# | OK, green light is on. |
| Blue light up | $B013# | $A013# | OK, blue light is on. |
| Yellow light up | $B014# | $A014# | OK, yellow light is on. |
| light A | $B015# | $A015# | OK, light A is on. |
| light B | $B016# | $A016# | OK, light B is on. |
| light C | $B017# | $A017# | OK, light C is on. |
| Display battery value | $B018# | $A018# | OK, battery value has been display. |
3.Voice control color recognition
| speech recognition content | The voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| What color is this? | $B060# | $A061# | This is red |
| What color is this? | $B060# | $A062# | This is blue |
| What color is this? | $B060# | $A063# | This is green |
| What color is this? | $B060# | $A064# | This is yellow |
4.Voice control color tracking
| speech recognition content | The voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| yellow following | $B072# | $A072# | OK, I found the yellow |
| red following | $B073# | $A073# | OK, I found the red |
| green following | $B074# | $A074# | OK, I found the green |
| follow this color | $B075# | $A075# | OK, I found this color |
| stop following | $B076# | $A076# | OK, it has been stoped |
5.Voice control automatic driving (line patrol)
| speech recognition content | The voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| Close tracking mode | $B022# | $A022# | OK, tracking mode is closed |
| Tracking the red line | $B023# | $A023# | OK, I will track the red line |
| Tracking the green line | $B024# | $A024# | OK, I will track the green line |
| Tracking the blue line | $B025# | $A025# | OK, I will track the blue line |
| Tracking the yellow line | $B026# | $A026# | OK, I will track the yellow line |
6.Voice control multi-point navigation
| speech recognition content | The voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| Go to the point A | $B019# | $A019# | OK, I'm going to the point A. |
| Go to the point B | $B020# | $A020# | OK, I'm going to the point B. |
| Go to the point C | $B021# | $A021# | OK, I'm going to the point C. |
| Go to the point D | $B022# | $A022# | OK, I'm going to the point D. |
| Return to the original place | $B023# | $A023# | OK, I'm return back. |
7.Basic voice control of robotic arm
| speech recognition content | he voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| Warning | $B038# | $A038# | OK |
| Lift the arm up | $B039# | $A039# | OK , the arm has been raised |
| Put the arm down | $B040# | $A040# | OK, the arm is down |
| Arm left | $B041# | $A041# | OK, the arm has turned left |
| Arm right | $B042# | $A042# | OK, the arm has turned right |
| Clamp the clip | $B043# | $A043# | OK, the clip is clamped |
| Open the clip | $B044# | $A044# | OK, the clip has been opened. |
control of robotic arm
| speech recognition content | he voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| Action A | $B045# | $A045# | OK |
| Action B | $B046# | $A045# | OK |
| Action C | $B047# | $A045# | OK |
| Action D | $B048# | $A045# | OK |
| Reset | $B049# | $A045# | OK |
| Action E | $B050# | $A045# | OK |
action of the robotic arm
| speech recognition content | he voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| Dancing | $B052# | $A052# | OK, Let's dance |
| Clip the block | $B053# | $A053# | OK,let me clip them |
robotic arm memory learning
| speech recognition content | he voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| record it | $B055# | $A055# $A056# | OK, please set the next action. Too many actions, I can't record them |
| Now is over | $B056# | $A057# | OK,Noted it,I've recorded them. |
| Display actions | $B057# | $A058# | OK, Let's do it |
| Clear actions | $B058# | $A059# | OK, actions have been cleared |
Sort color block
| speech recognition content | he voice module is sent to the host | The host sends to the voice module | Voice broadcast content |
|---|---|---|---|
| Sort color block | $B061# | $A065# | It has been in its place |
| $A066# | This is yellow | ||
| $A067# | This is green | ||
| $A068# | This is blue | ||
| $A069# | This is red |
2. Voice control module port binding
Since the ID device number of the ROS expansion board and the voice control module are the same, it is not possible to bind the ID device number according to the method in the previous tutorial. Unbound ports may cause port conflicts or device identification errors. Do not change the positions of bound ports at will. Otherwise, the bound ports become invalid.
This course is completed on the host, no docke binding is required, and this section uses the Raspberry PI as the host to demonstrate. Before binding, it is necessary to comment out the part involving myserial in the host rule file, otherwise the voice board and ROS extension board will be identified as the same device.
sudo gedit /etc/udev/rules.d/usb.rules
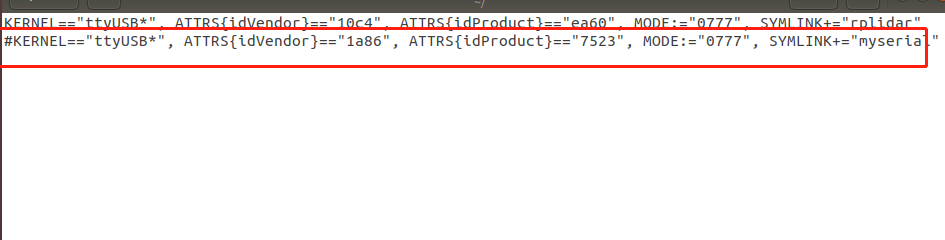
As shown in the figure above, the myserial related binding content is commented, saved and quit, and the terminal enters the following command to reload the rule.
xxxxxxxxxxsudo udevadm triggersudo service udev reloadsudo service udev restart
2.1. Bind the device of the ROS expansion board
xxxxxxxxxxll /dev/ttyUSB*ll /dev/rplidarFirst, ttyUSB0 and ttyUSB1 can be obtained without accessing the voice control board
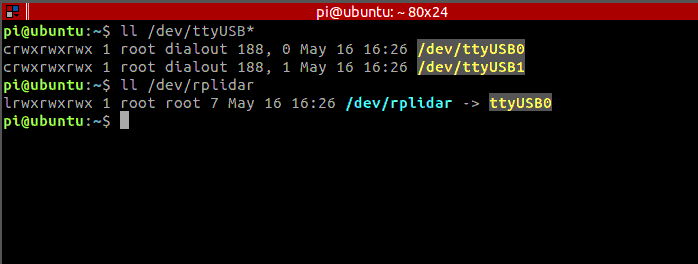
ttyUSB0 is the radar device , Then ttyUSB1 is the device of the ROS expansion board
Second, we check the port information of the ROS expansion board, mainly to check the device path information and terminal input.
xxxxxxxxxxudevadm info --attribute-walk --name=/dev/ttyUSB1 |grep devpath
The following information is obtained (based on actual conditions). The red box indicates the path information of the device.

Third, We modify (/etc/udev/rules.d/rplidar.rules) this file, bind the port number of the ROS expansion board, and enter the terminal
xxxxxxxxxxsudo gedit /etc/udev/rules.d/myserial.rules
Add content as shown below
xxxxxxxxxxKERNEL=="ttyUSB*",ATTRS{devpath}=="1.4.3",ATTRS{idVendor}=="1a86",ATTRS{idProduct}=="7523",MODE:="0777",SYMLINK+="myserial"

Last, Save and exit. Run the following three commands to reload the device
xxxxxxxxxxsudo udevadm triggersudo service udev reloadsudo service udev restart2.2. bind the device of the voice board
To access the voice board, run the following command on the terminal to view the device number
xxxxxxxxxxll /dev/ttyUSB*
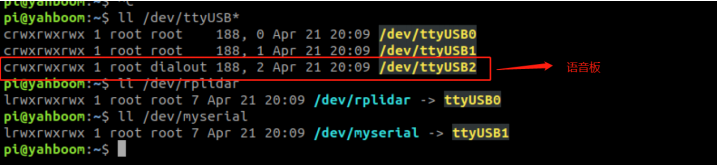
Here we find that the voice board is identified by the system as /dev/ttyUSB2, so we enter the following command to view the path of the device
xxxxxxxxxxudevadm info --attribute-walk --name=/dev/ttyUSB2 |grep devpath
Then, we modify (/etc/udev/rules.d/rplidar.rules) this file, bind the port number of the voice board, and enter the terminal
xxxxxxxxxxsudo gedit /etc/udev/rules.d/myspeech.rules
Add content as shown below
xxxxxxxxxxKERNEL=="ttyUSB*",ATTRS{devpath}=="1.4.2",ATTRS{idVendor}=="1a86",ATTRS{idProduct}=="7523",MODE:="0777",SYMLINK+="myspeech"
Save and exit. Run the following three commands to reload the device
xxxxxxxxxxsudo udevadm triggersudo service udev reloadsudo service udev restart2.3. Test
Attention their wiring position. This is fixed after binding, do not change the position at will, otherwise the system will not recognize the device.
xxxxxxxxxxll /dev/myserialll /dev/myspeech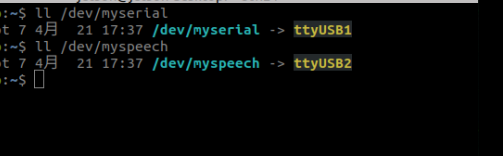
As shown in the figure above, if /dev/myserial and /dev/myspeech can be identified and the ttyUSB* port numbers behind them are inconsistent, the binding is successful
Attention: The ROS expansion board and voice board cannot be plugged into other ports after binding, otherwise the device number will not be recognized. If both are connected to the HUB expansion board, the HUB board cannot be plugged into other mainboard ports
2.4. Notes
After the voice board is bound to the container, you need to mount /dev/myspeech to identify the voice board in docker, Mount mode reference [07、Docker-05、Enter the robot's Docker container]