10. Mediapipe gesture control robotic arm action group
10. Mediapipe gesture control robotic arm action group10.1. Introduction10.2. Use10.4. Core files10.4.1、mediaArm.launch10.4.2, FingerCtrl.py10.5. Flowchart
10.1. Introduction
MediaPipe is a data stream processing machine learning application development framework developed by Google and open source. It is a graph-based data processing pipeline for building data sources using many forms, such as video, audio, sensor data, and any time series data. MediaPipe is cross-platform and can run on embedded platforms (Raspberry Pi, etc.), mobile devices (iOS and Android), workstations and servers, and supports mobile GPU acceleration. MediaPipe provides cross-platform, customizable ML solutions for live and streaming media.
10.2. Use
Note: [R2] on the remote control handle has the [pause/start] function for this gameplay.
The case in this section may run very slowly on the robot main control. It is recommended to connect the camera to the virtual machine and run the [02_PoseCtrlArm.launch] file. The NX main control effect will be better. You can try it.
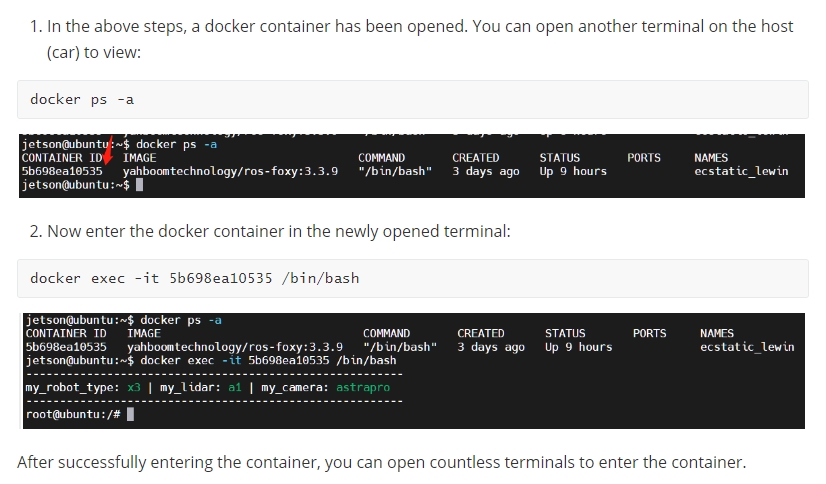
xxxxxxxxxx#Raspberry Pi 5 master needs to enter docker first, please perform this step#If running the script into docker fails, please refer to ROS/07, Docker tutorial~/run_docker.shxxxxxxxxxxroslaunch arm_mediapipe mediaArm.launch # robot<PI5 needs to open another terminal to enter the same docker container
xxxxxxxxxxrosrun arm_mediapipe FingerCtrl.py # The robot can also be started in a virtual machine, but the virtual machine needs to be configured with a cameraAfter the program is running, press the R2 key of the handle to touch the control. The camera will capture the image and there are six gestures, as follows
Gesture Yes: the robotic arm dances
Gesture OK: The robotic arm shakes its head and the clamping claws tighten
Gesture contempt (clench fist, extend thumb, thumb down): The robotic arm kneels down and the clamping claws are tightened
Gesture number 1: Robotic arm nods
Gesture rock (the index finger and little finger are straightened, and the other fingers are bent): the robotic arm is straightened and turned left and right
Gesture number 5: robotic arm applauds
Here, after each gesture is completed, it will return to the initial position and beep, waiting for the next gesture recognition.
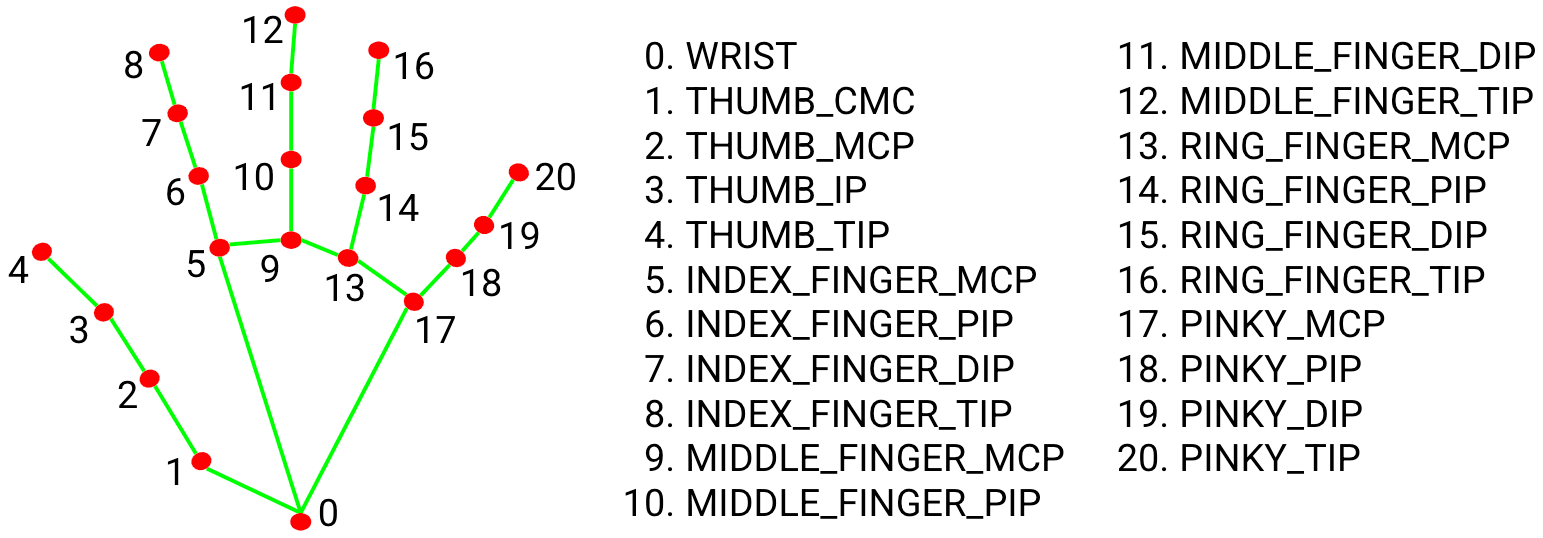
MediaPipe Hands infers the 3D coordinates of 21 hand-valued joints from a frame.
10.4. Core files
10.4.1、mediaArm.launch
xxxxxxxxxx<launch> <include file="$(find yahboomcar_ctrl)/launch/yahboom_joy.launch"/> <include file="$(find yahboomcar_bringup)/launch/yahboomcar.launch"/> <node pkg="web_video_server" type="web_video_server" name="web_video_server" output="screen"/> <node name="msgToimg" pkg="arm_mediapipe" type="msgToimg.py" output="screen" required="true"/></launch>10.4.2, FingerCtrl.py
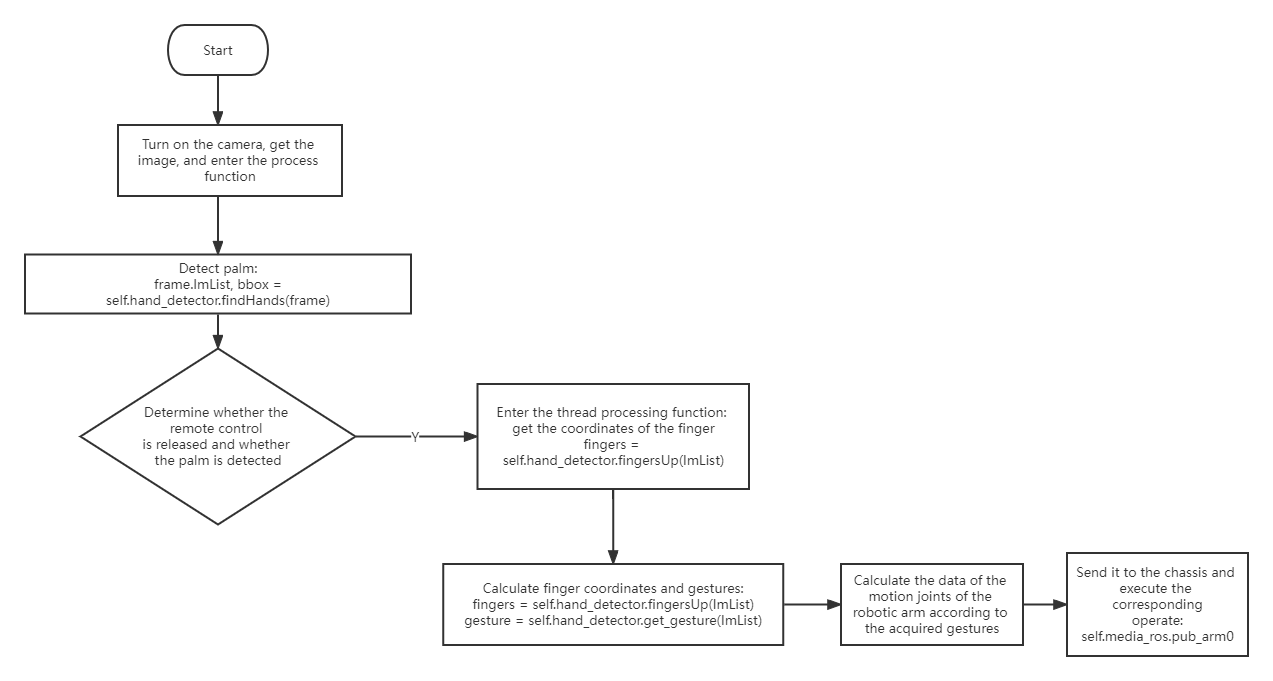
xxxxxxxxxxframe, lmList, bbox = self.hand_detector.findHands(frame) #Detect palmsfingers = self.hand_detector.fingersUp(lmList) #Get finger coordinatesgesture = self.hand_detector.get_gesture(lmList) #Get gesturesFor the specific implementation process of the above three functions, please refer to the content in media_library.py
The implementation process here is also very simple. The main function opens the camera to obtain data and then passes it to the process function, which performs "detect palm" -> "get finger coordinates" -> "get gesture" in order, and then determine the needs based on the gesture results. The action performed.
10.5. Flowchart