Voice controlled mechanical dog movement
Quick use
1. Power on DOGZILLA
First, we turn on the switching power supply of the mechanical dog and start the mechanical dog

After starting, we can view the IP address on the small screen of the robot dog.
2. Start DOGZILLA chassis
PI4 version steps:
Then use the ssh terminal to connect to the robot dog.
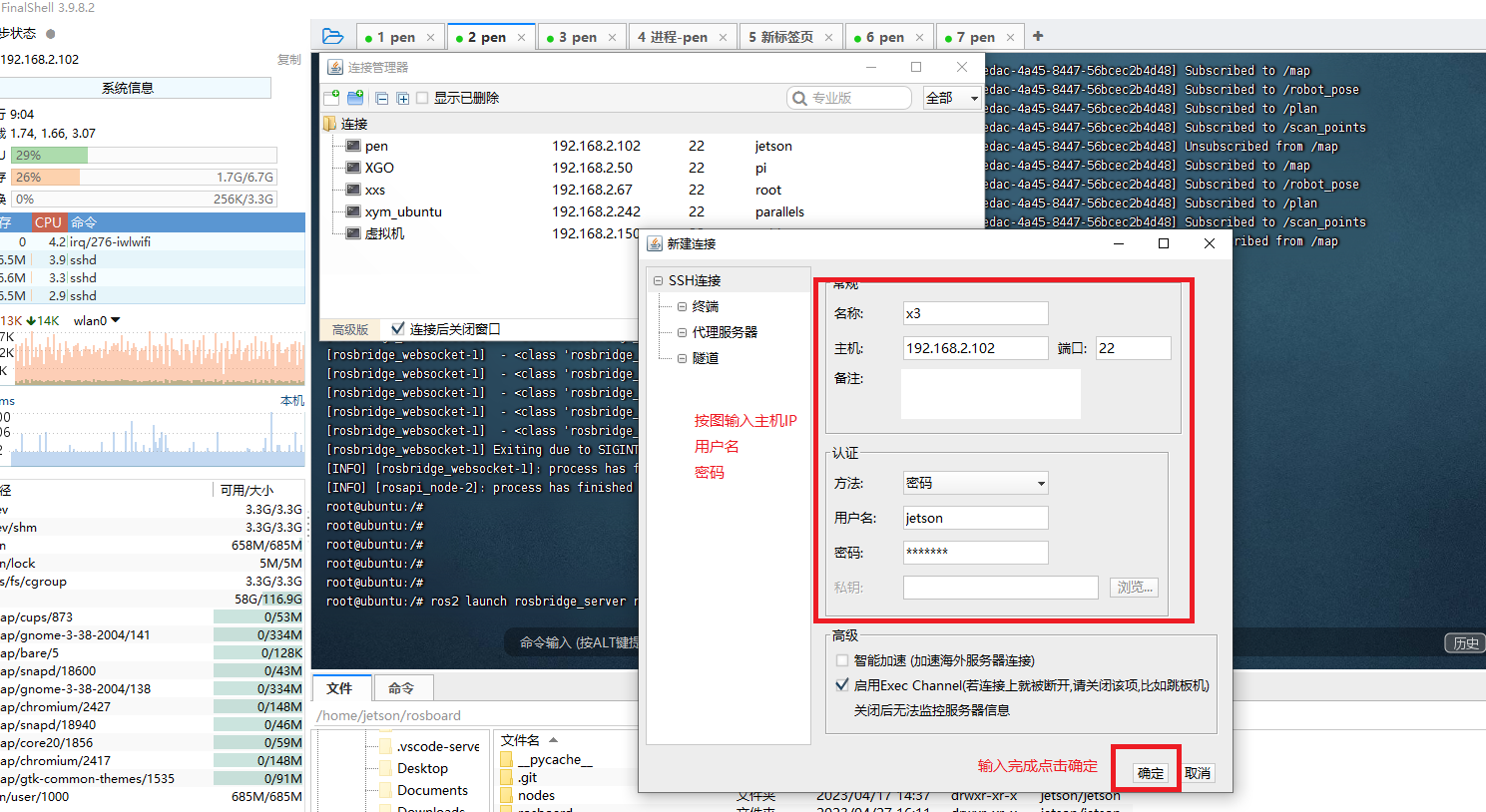
Note: The IP address used when writing this tutorial: 192.168.2.102 User name: pi Password: yahboom The actual IP address shall prevail when used.
Open the shell tool. The shell tool I use here is FinalShell. Enter username, password, port, connection name and other information.
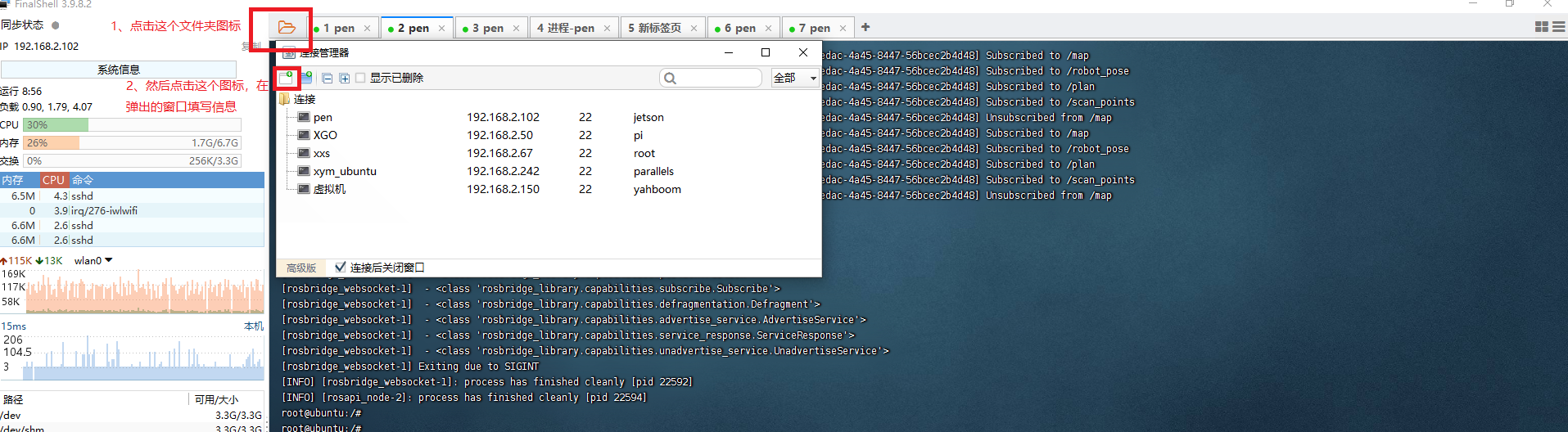
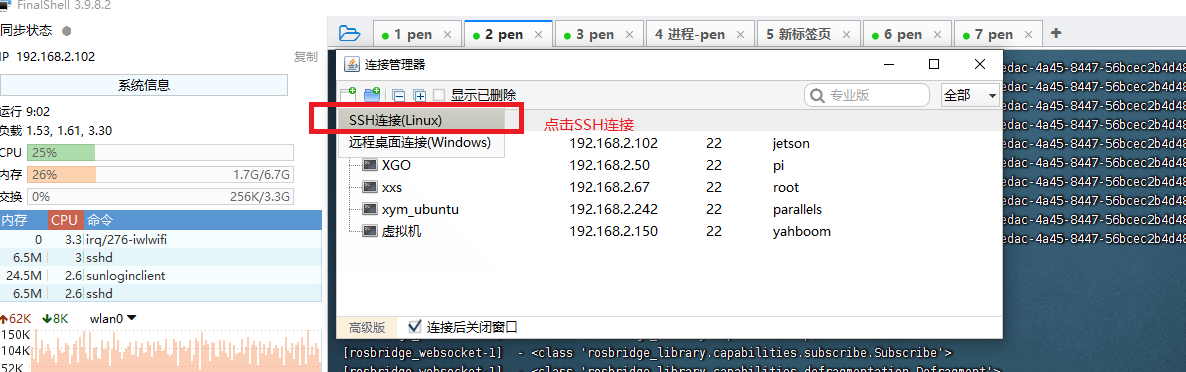
Select ssh connection to create a new ssh connection
Here the username is pi, the password is yahboom, and the ip address is the IP address of the real robot dog.
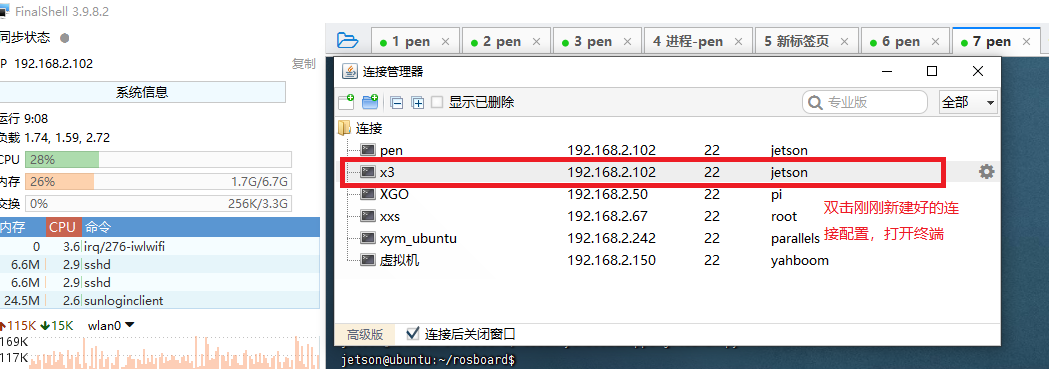
Select the ssh connection you just created here.
Enter the command in the terminal to start the chassis task.
xxxxxxxxxxsudo systemctl restart YahboomStart.service

PI5 version steps:
After the mechanical dog is started, use the vnc software to remotely connect to the mechanical dog through the IP address on the OLED (For specific steps, please see "Remote Login Operation").
Then ctrl+c closes the large program and enter the following command to enter docker:
xxxxxxxxxx./run_humble.sh
Then enter the following commands in the docker terminal to start the car radar, imu, and mechanical dog joint status nodes.
xxxxxxxxxxros2 launch bringup Navigation_bringup.launch.py
3. Start the program to control the movement of the mechanical dog by voice
The steps are the same for PI4 and PI5 versions:
Open another shell or docker terminal and enter the following command in the terminal:
Note: This terminal is used to open the remote connection to the mechanical dog.
xxxxxxxxxx#pi4cd ~/cartographer_ws2source install/setup.bashros2 run voice_xgo_ctrl_run voice_xgo_ctrl_run#pi5 (need to enter the docker container)cd yahbomcar_Ws/source install/setup.bashros2 run voice_xgo_ctrl_run voice_xgo_ctrl_run
Then he said to the mechanical dog: "Hello, Xiaoya".
The robot dog will respond: "Yes."
Then say to the mechanical dog: "The car moves forward" or "The car moves back" etc.
The voice commands include: car forward, stop, car back, car turn left, car turn right. The mechanical dog recognizes the voice command and will perform corresponding actions.
Note: After the mechanical dog is awakened by voice, it does not need to be awakened again within 20 seconds.