Robotic arm clamping blocks
1. Introduction to gameplay
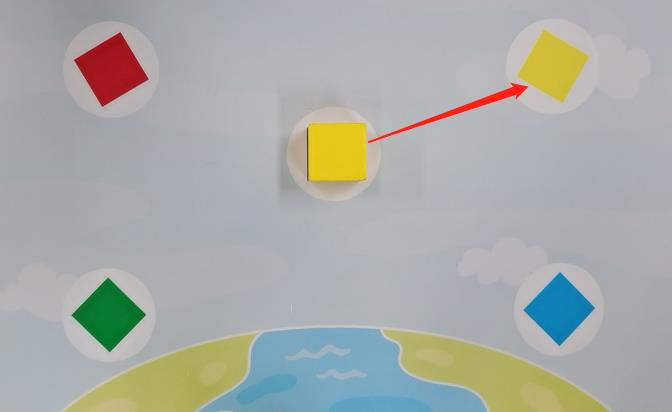
The purpose of this experiment is to move the blocks from the gray area in the middle to the surrounding square areas of different colors. First put the yellow block into the gray area, and then run the code unit to the sixth unit in sequence (grab a building block from the gray building block and place it on the yellow building block). At this time, the robot arm will automatically grab Place the block in the gray area, then into the yellow area, then return to the ready position. Before running the seventh code unit, you need to place the red block in the gray area, and then run the seventh unit (grab a building block from the gray building block and place it on the red building block), so that the red block is also It will be captured to the red area, and other blocks are operated in the same way.
2. Start Docker
After entering the Raspberry Pi 5 desktop, open a terminal and run the following command to start the container corresponding to Dofbot:
xxxxxxxxxx./Docker_Ros.sh
Access Jupyter Lab within Docker:
xxxxxxxxxxIP:9999 // Example: 192.168.1.11:9999
3. Code content
Code path:/root/Dofbot/3.ctrl_Arm/9.clamp_block.ipynb
The following code content needs to be executed according to the actual step, and cannot be run all at once. Before picking up the building blocks, you need to place the building blocks on the gray building blocks in the middle, and only one block can be placed at a time.
xxxxxxxxxx#!/usr/bin/env python3#coding=utf-8import timefrom Arm_Lib import Arm_Device#Create a robotic arm objectArm = Arm_Device()time.sleep(.1)xxxxxxxxxx# Define the function of clamping building blocks, enable=1: clamp, =0: releasedef arm_clamp_block(enable): if enable == 0: Arm.Arm_serial_servo_write(6, 60, 400) else: Arm.Arm_serial_servo_write(6, 130, 400) time.sleep(.5)# Define the mobile robot arm function and control the movement of servos No. 1-5 at the same time, p=[S1, S2, S3, S4, S5]def arm_move(p, s_time = 500): for i in range(5): id=i+1 if id == 5: time.sleep(.1) Arm.Arm_serial_servo_write(id, p[i], int(s_time*1.2)) else : Arm.Arm_serial_servo_write(id, p[i], s_time) time.sleep(.01) time.sleep(s_time/1000)# Robotic arm moves updef arm_move_up(): Arm.Arm_serial_servo_write(2, 90, 1500) Arm.Arm_serial_servo_write(3, 90, 1500) Arm.Arm_serial_servo_write(4, 90, 1500) time.sleep(.1)xxxxxxxxxx# Define variable parameters at different locationsp_mould = [90, 130, 0, 0, 90]p_top = [90, 80, 50, 50, 270]p_Brown = [90, 53, 33, 36, 270]p_Yellow = [65, 22, 64, 56, 270]p_Red = [117, 19, 66, 56, 270]p_Green = [136, 66, 20, 29, 270]p_Blue = [44, 66, 20, 28, 270]xxxxxxxxxx# Let the robotic arm move to a position ready to grabarm_clamp_block(0)arm_move(p_mould, 1000)time.sleep(1)xxxxxxxxxx# Grab a building block from the gray building block and place it on the yellow building block.arm_move(p_top, 1000)arm_move(p_Brown, 1000)arm_clamp_block(1)arm_move(p_top, 1000)arm_move(p_Yellow, 1000)arm_clamp_block(0)arm_move(p_mould, 1000)time.sleep(1)xxxxxxxxxx# Grab a building block from the gray building block and place it on the red building block.arm_move(p_top, 1000)arm_move(p_Brown, 1000)arm_clamp_block(1)arm_move(p_top, 1000)arm_move(p_Red, 1000)arm_clamp_block(0)arm_move_up()arm_move(p_mould, 1100)time.sleep(1)xxxxxxxxxx# Grab a building block from the gray building block and place it on the green building block.arm_move(p_top, 1000)arm_move(p_Brown, 1000)arm_clamp_block(1)arm_move(p_top, 1000)arm_move(p_Green, 1000)arm_clamp_block(0)arm_move_up()arm_move(p_mould, 1100)time.sleep(1)xxxxxxxxxx# Grab a building block from the gray building block and place it on the blue building block.arm_move(p_top, 1000)arm_move(p_Brown, 1000)arm_clamp_block(1)arm_move(p_top, 1000)arm_move(p_Blue, 1000)arm_clamp_block(0)arm_move_up()arm_move(p_mould, 1100)time.sleep(1)del Arm # Release the Arm object