MoveIt precautions and control of the real machine
Follow the previous steps to install the virtual machine. After decompressing the system files, open the virtual machine and use it. The environment has been set up and the relevant code has been placed in the Ubuntu system, in the file path /home/dofbot/dofbot_ws/src directory.
1. Control the real machine
Configure multi-machine communication
Just refer to the distributed communication tutorial in ros basics
Start Docker
After entering the Raspberry Pi 5 desktop, open a terminal and run the following command to start the container corresponding to Dofbot:
xxxxxxxxxx./Docker_Ros.sh
Using Raspberry Pi as host
roslaunch dofbot_config demo.launch #Virtual machine siderosrun dofbot_moveit 00_dofbot_move.py #Host side
The corresponding relationship between the robotic arm servo and the joints: from the lowest end of the robotic arm to the end of the gripper.
| Robotic arm servo | joint | joint |
|---|---|---|
| The first servo | joint1 | joint1 |
| Second servo | joint2 | joint2 |
| The third servo | joint3 | joint3 |
| The fourth servo | joint4 | joint4 |
| The fifth servo | joint5 | joint5 |
| Servo that controls the gripper | grip_joint | Gripper |
2. Start the robotic arm
When using the robot arm to move randomly to control a real machine, pay attention to the movement of the robot arm. Try to keep no objects next to the robot arm, because random movement will cause random walking.
Scene Design: You can design the scene yourself and then import it.
When movelt is run and combined with the real machine case, there are non-corresponding actions. It may be because the previous control program has not been completely closed. You can try using Ctrl+C to interrupt the program, or simply close the terminal to shut down the previous process more completely.
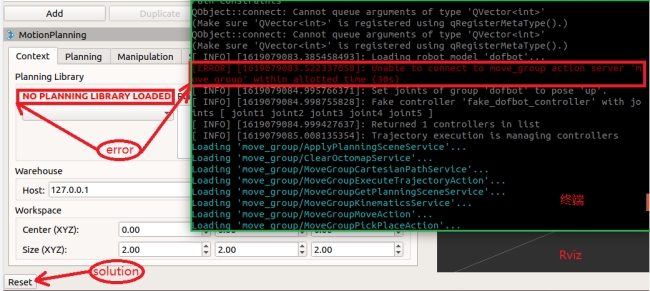
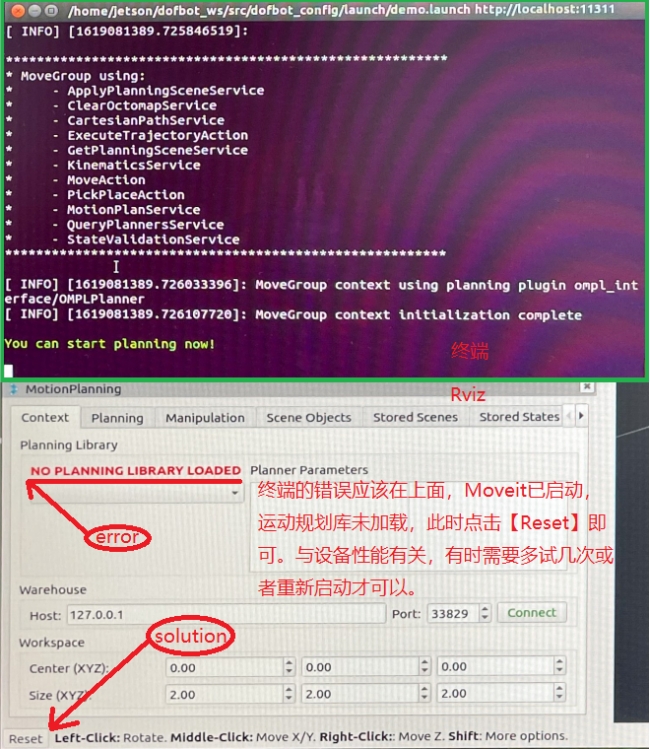
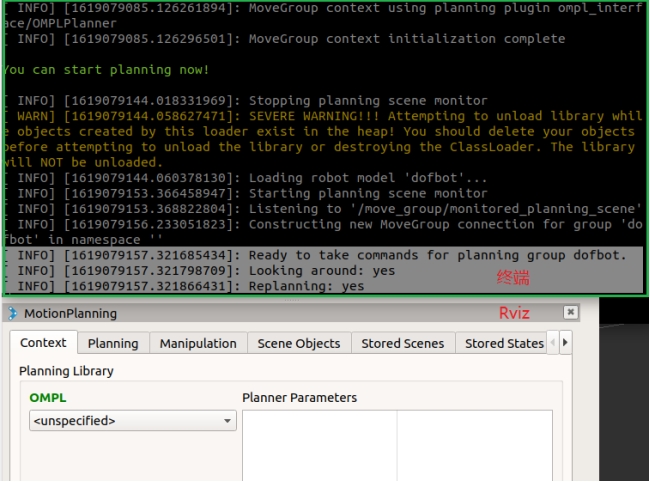
3. MoveIT startup
The MoveIt simulation environment starts slowly, so wait patiently and observe the terminal. An error occurs as shown in the figure below. The solution is as shown in the figure. If the terminal reports an error and the motion planning library is not loaded, click [Reset] in the lower left corner and reload. At first, it is during the loading process. Don't rush to click [Reset]. If you click it before loading is complete, the system will reload and it will not start.