Palm control 2DOF servo PTZ
Note: The VM and ROS-wifi image transfer module must be consistent with the microROS control board ROS_DOMAIN_ID and set the value to 20. You can check [MicroROS control board Parameter configuration] to set the microROS control board ROS_DOMAIN_ID. Check the tutorial Connecting to MicroROS Agents to see if the ids are the same.
1、synopsis
MediaPipe is an open source and data stream processing machine learning application development framework developed by Google. It is a graph-based data processing pipeline for building data sources that use many forms, such as video, audio, sensor data, and any time series data. MediaPipe is cross-platform and can run on embedded platforms (Raspberry PI, etc.), mobile devices (iOS and Android), workstations and servers, and supports GPU acceleration on mobile. MediaPipe provides cross-platform, customizable ML solutions for live and streaming media.
2、Program specification
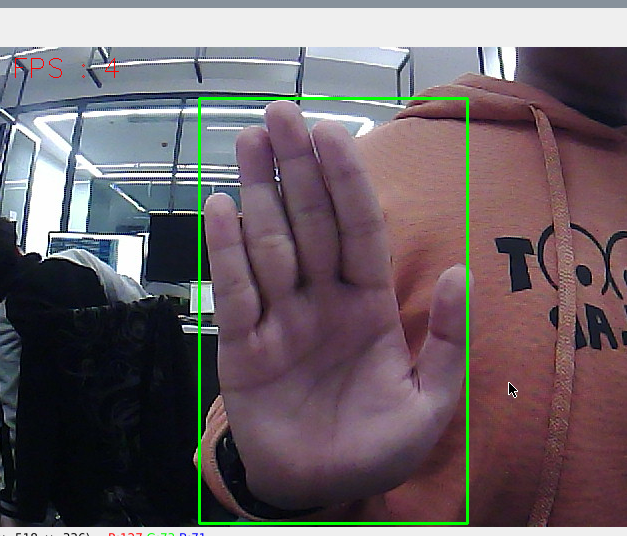
After the program starts, after the camera captures the image, the two-dimensional head of the car will follow the movement of the palm in the picture. The moving speed of the palm movement here should not be too fast, otherwise the image processing can not keep up, which will cause a lag.
2.1、Program code reference path
/home/yahboom/yahboomcar_ws/src/yahboom_esp32ai_car/yahboom_esp32ai_car/control_shape.py
3、Program initiation
3.1、Start command
Terminal input,
xxxxxxxxxxros2 run yahboom_esp32ai_car control_shape
If the Angle of the camera is not at this Angle, please press CTRL+C to end the program and run again, this is because the network delay causes the Angle of sending the steering gear to lose packets

If the camera picture image appears upside down, you need to see 3. Camera picture correction (must see) document itself correction, the experiment is no longer described.
After the function is turned on, the two-dimensional head of the car will follow the palm movement.
4、Code parsing
4.1、control_shape.py
xxxxxxxxxx/home/yahboom/yahboomcar_ws/src/yahboom_esp32ai_car/yahboom_esp32ai_car/control_shape.py
Code parsing
1)、Import important library files
xxxxxxxxxxfrom media_library import *2)、Check the hand, get finger information
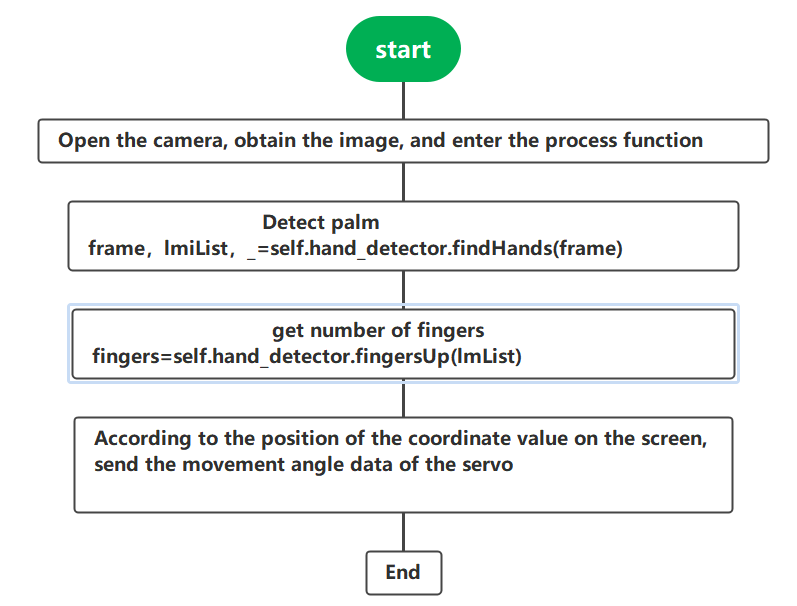
xframe, lmList, bbox = self.hand_detector.findHands(frame)angle = self.hand_detector.ThumbTOforefinger(lmList)3)、Calculate the Angle of each steering gear
xxxxxxxxxxpoint_x = lmList[9][1]point_y = lmList[9][2]if point_y >= 200: self.y -= 1elif point_y <= 100: self.y += 1if point_x >= 420: self.x -= 1elif point_x <= 300: self.x += 1if self.x <= -45: self.x = -45elif self.x >= 45: self.x=45if self.y <= -90: self.y = -90elif self.y >=40: self.y = 40It can be seen that indexX and indexY are the coordinates of the center point of the picture frame, and the Angle of rotation of the steering gear should be calculated through judgment. The parameters of each Angle calculation method are calibrated according to the actual rotation Angle and the visual range of the camera.
4.2、Flow chart