Semantic Segmentation
1. Introduction to Semantic Segmentation
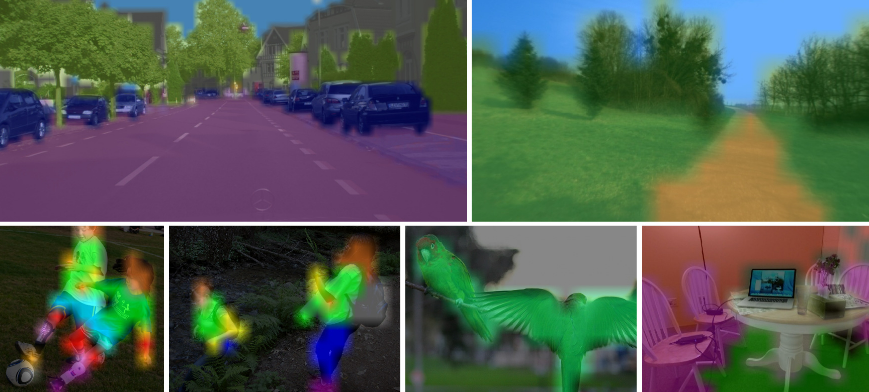
The next deep learning function we will cover in this tutorial is semantic segmentation. Semantic segmentation is based on image recognition, except that classification occurs at the pixel level, rather than the entire image. This is achieved by convolving a pre-trained image recognition backbone, which converts the model into a fully convolutional network (FCN) capable of pixel-by-pixel labeling. Segmentation is particularly useful for environmental perception, producing a dense per-pixel classification of many different potential objects for each scene, including the scene foreground and background.
segNet takes a 2D image as input and outputs a second image with a per-pixel classification mask overlaid. Each pixel of the mask corresponds to the classified object category. segNet can be used from Python and C++.
Download Other Models
Various pre-trained segmentation models for the FCN-ResNet18 network with real-time performance on Jetson. Below is a table of pre-trained semantic segmentation models available for use, and the associated --network parameters of segnet used to load them. They are based on a 21-class FCN-ResNet18 network, trained on various datasets and resolutions using PyTorch, and exported to ONNX format for loading into TensorRT.
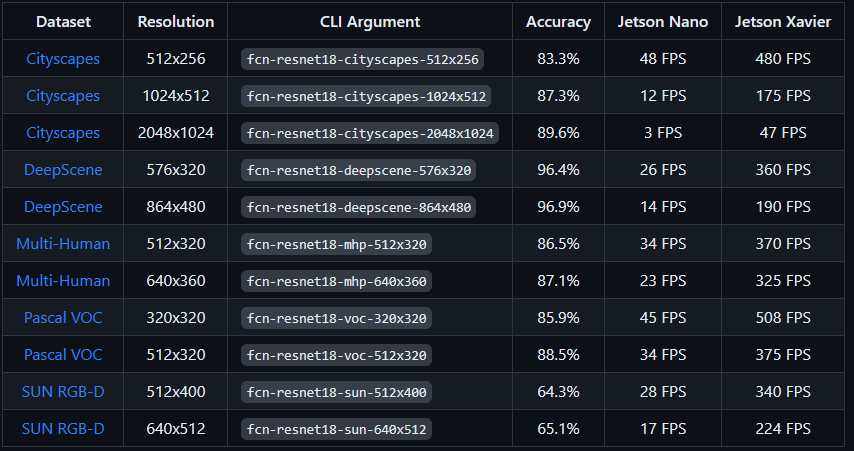
Here you can download the model you want from https://github.com/dusty-nv/jetson-inference
2. Image semantic segmentation
Here is an example of segmenting a city street scene using the Cityscapes model:
After building the project, make sure your terminal is in the aarch64/bin directory:
xxxxxxxxxxcd jetson-inference/build/aarch64/bin
Here are some examples using the fcn-resnet18-cityscapes model:
--network=
xxxxxxxxxx# C++$ ./segnet --network=fcn-resnet18-cityscapes images/city_0.jpg images/test/output.jpg# Python$ ./segnet.py --network=fcn-resnet18-cityscapes images/city_0.jpg images/test/output.jpg
The following example is a DeepScene dataset consisting of off-road forest trails and vegetation, which helps path tracking for outdoor robots.
C++
xxxxxxxxxx$ ./segnet --network=fcn-resnet18-deepscene images/trail_0.jpg images/test/output_overlay.jpg # overlay$ ./segnet --network=fcn-resnet18-deepscene --visualize=mask images/trail_0.jpg images/test/output_mask.jpg # mask
python
xxxxxxxxxx$ ./segnet.py --network=fcn-resnet18-deepscene images/trail_0.jpg images/test/output_overlay.jpg # overlay$ ./segnet.py --network=fcn-resnet18-deepscene --visualize=mask images/trail_0.jpg images/test/output_mask.jpg # mask
Note: If you build your own environment, you need to download the model file to the network folder to run the above program. You can directly enter the above program using the image we provide
3. Run the real-time camera segmentation demonstration
The segnet.cpp / segnet.py samples we used before can also be used for real-time camera streams. Supported camera types include:
- MIPI CSI cameras ( csi://0 )
- V4L2 cameras ( /dev/video0 )
- RTP/RTSP streams ( rtsp://username:password@ip:port )
Here are some typical scenarios for launching the program - for available models
C++
xxxxxxxxxx$ ./segnet --network=<model> csi://0 # MIPI CSI camera$ ./segnet --network=<model> /dev/video0 # V4L2 camera$ ./segnet --network=<model> /dev/video0 output.mp4 # save to video file
python
xxxxxxxxxx$ ./segnet.py --network=<model> csi://0 # MIPI CSI camera$ ./segnet.py --network=<model> /dev/video0 # V4L2 camera$ ./segnet.py --network=<model> /dev/video0 output.mp4 # save to video file
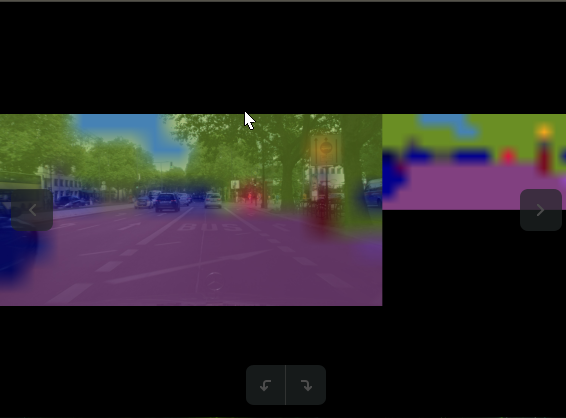
Where model is something we can choose. The model I use here is fcn-resnet18-mhp.
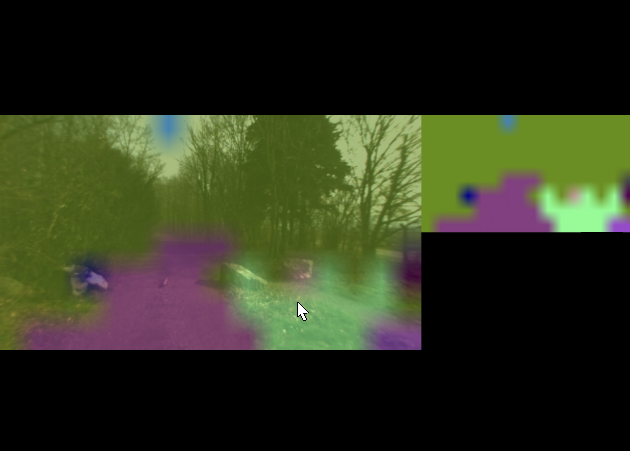
The OpenGL window shows the live camera stream with the segmentation output superimposed, and a solid segmentation mask for clarity. Here are some examples to try with different models:
xxxxxxxxxx# C++$ ./segnet --network=fcn-resnet18-deepscene /dev/video0# Python$ ./segnet.py --network=fcn-resnet18-deepscene /dev/video0
