Apriltag tag code recognition
1. Introduction
Apriltag is a coded tag commonly used in machine vision. It has high recognition rate and reliability and can be used for various tasks including augmented reality, robotics and camera calibration.
2. Start
2.1 Preparation
The Apriltag label code uses the TAG36H11 format. The relevant label code is already provided at the factory and affixed to the building blocks. You need to take out the building blocks and place them under the camera screen for identification.
2.2 Program description
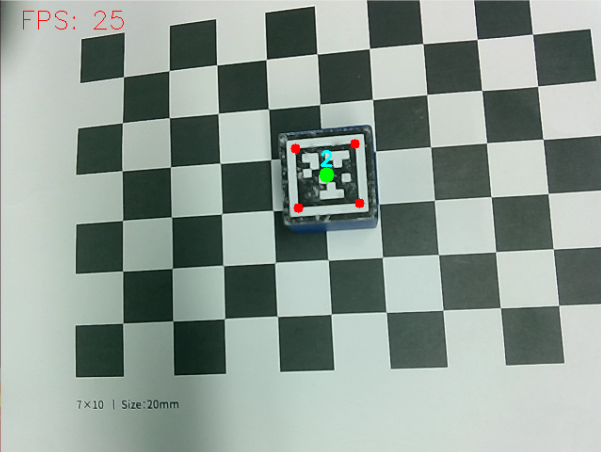
After the program is started, the camera captures the image and puts the label code into the camera screen. The system will recognize and frame the four vertices of the label code and display the ID number of the label code.
2.3 Start program
Input following command to start the program
xxxxxxxxxxroscorerosrun jetcobot_apriltag apriltag_identify.py2.4 About code
Code path:~/jetcobot_ws/src/jetcobot_apriltag/scripts/apriltag_identify.py
x#!/usr/bin/env python3# encoding: utf-8import cv2 as cvimport timefrom dt_apriltags import Detectorfrom jetcobot_utils.vutils import draw_tagsimport loggingimport jetcobot_utils.logger_config as logger_config
class ApriltagIdentify: def __init__(self): logger_config.setup_logger() self.image = None self.at_detector = Detector(searchpath=['apriltags'], families='tag36h11', nthreads=8, quad_decimate=2.0, quad_sigma=0.0, refine_edges=1, decode_sharpening=0.25, debug=0)
def getApriltagPosMsg(self, image): self.image = cv.resize(image, (640, 480)) msg = {} try: tags = self.at_detector.detect(cv.cvtColor( self.image, cv.COLOR_RGB2GRAY), False, None, 0.025) tags = sorted(tags, key=lambda tag: tag.tag_id) if len(tags) > 0: for tag in tags: point_x = tag.center[0] point_y = tag.center[1] (a, b) = (round(((point_x - 320) / 4000), 5), round(((480 - point_y) / 3000) * 0.8+0.15, 5)) msg[tag.tag_id] = (a, b)
self.image = draw_tags(self.image, tags, corners_color=( 0, 0, 255), center_color=(0, 255, 0)) except Exception as e: logging.info('getApriltagPosMsg e = {}'.format(e)) return self.image, msg
def getSingleApriltagID(self, image): self.image = cv.resize(image, (640, 480)) tagId = "" try: tags = self.at_detector.detect(cv.cvtColor( self.image, cv.COLOR_RGB2GRAY), False, None, 0.025) tags = sorted(tags, key=lambda tag: tag.tag_id) if len(tags) == 1: tagId =str(tags[0].tag_id) self.image = draw_tags(self.image, tags, corners_color=( 0, 0, 255), center_color=(0, 255, 0)) except Exception as e: logging.info('getSingleApriltagID e = {}'.format(e)) return self.image, tagId
if __name__ == '__main__': capture = cv.VideoCapture(0) capture.set(cv.CAP_PROP_FRAME_WIDTH, 640) capture.set(cv.CAP_PROP_FRAME_HEIGHT, 480) tag_identify = ApriltagIdentify()
t_start = time.time() m_fps = 0 try: while capture.isOpened(): action = cv.waitKey(10) & 0xFF if action == ord('q'): break ret, img = capture.read() img, data = tag_identify.getApriltagPosMsg(img) m_fps = m_fps + 1 fps = m_fps / (time.time() - t_start) if(time.time() - t_start >= 2000): t_start = time.time() m_fps = fps text = "FPS: " + str(int(fps)) cv.putText(img, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1) cv.imshow('img', img) except: pass capture.release() cv.destroyAllWindows()