Object detection algorithm—YOLOv5
1. Preparation
This example implements the camera target detection algorithm based on the YOLOv5 model. Users can preview the detection results on the display.
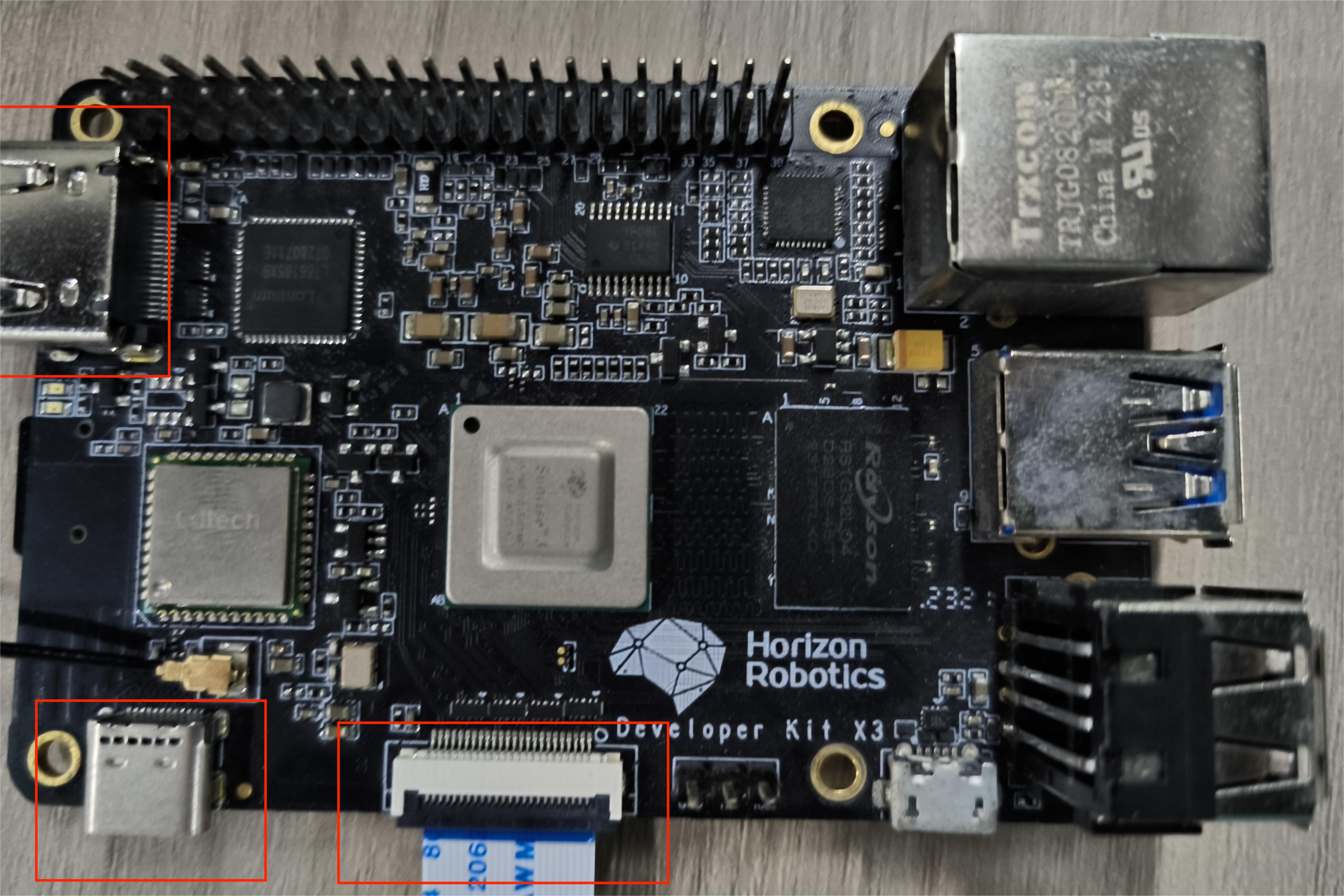
- When the development board is powered off, connect the MIPI camera to the development board
- Connect the development board and the monitor via an HDMI cable
- Power on the development board and log in via the command line
2. Running method
The sample code is provided in source code form and needs to be compiled and run using the make command.
The steps are as follows.
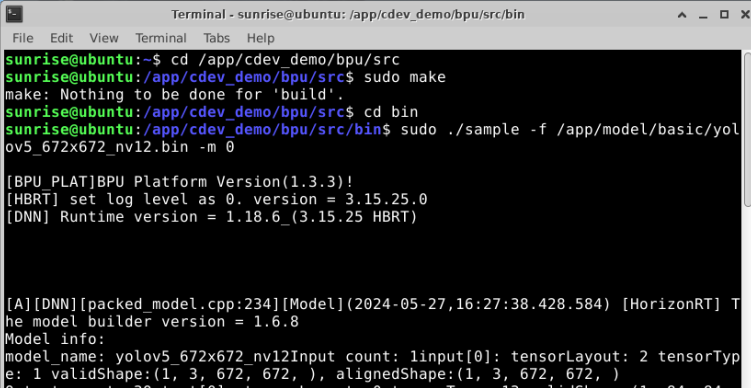
sunrise@ubuntu:~$ cd /app/cdev_demo/bpu/srcsunrise@ubuntu:/app/cdev_demo/bpu/src$ sudo makesunrise@ubuntu:/app/cdev_demo/bpu/src$ cd bin sunrise@ubuntu:/app/cdev_demo/bpu/src/bin$ sudo ./sample -f /app/model/basic/yolov5_672x672_nv12.bin -m 0Parameter configuration:
- -f: model path
- -m: model type, default is 0
3. Result
After the program runs correctly
The video and the image rendered by the algorithm detection will be output through the HDMI interface, and the user can preview it through the monitor.

The running log is as follows.
xxxxxxxxxxsunrise@ubuntu:/app/cdev_demo/bpu/src/bin$ sudo ./sample -f /app/model/basic/yolov5_672x672_nv12.bin -m 0[BPU_PLAT]BPU Platform Version(1.3.1)![HBRT] set log level as 0. version = 3.14.5[DNN] Runtime version = 1.9.7_(3.14.5 HBRT)Model info:model_name: yolov5_672x672_nv12Input count: 1input[0]: tensorLayout: 2 tensorType: 1 validShape:(1, 3, 672, 672, ), alignedShape:(1, 3, 672, 672, )Output count: 3Output[0]: tensorLayout: 0 tensorType: 13 validShape:(1, 84, 84, 255, ), alignedShape:(1, 84, 84, 255, )Output[1]: tensorLayout: 0 tensorType: 13 validShape:(1, 42, 42, 255, ), alignedShape:(1, 42, 42, 255, )Output[2]: tensorLayout: 0 tensorType: 13 validShape:(1, 21, 21, 255, ), alignedShape:(1, 21, 21, 255, )Setting VPS channel-1: src_w:1920, src_h:1080; dst_w:672, dst_h:672;Setting VPS channel-3: src_w:1920, src_h:1080; dst_w:1024, dst_h:600;Setting VPS channel-2: src_w:1920, src_h:1080; dst_w:1920, dst_h:1080;start linear mode, sensor_name f37, setting_size = 3libiar: hb_disp_set_timing done!yolov5_do_post fps:11.627907,processing time :86