11. AprilTag tag code follow
11. AprilTag tag code follow11.1 Introduction11.2 Startup11.2.1 Preparation before program startup11.2.2 Program description11.2.3, Program Startup11.2.4, Source code
11.1 Introduction
Apriltag tag code tracking is based on apriltag tag code recognition, adding the function of car body movement, controlling the car body so that the camera will keep the tag code moving left and right in the middle of the vision, and based on the principle that objects are larger when near and smaller when far in the camera image, the tag code following function is realized.
11.2 Startup
11.2.1 Preparation before program startup
This apriltag tag code uses TAG36H11 format, and the factory has equipped the relevant tag code and attached it to the building block. You need to take out the building block and place it on the camera screen for recognition.
11.2.2 Program description
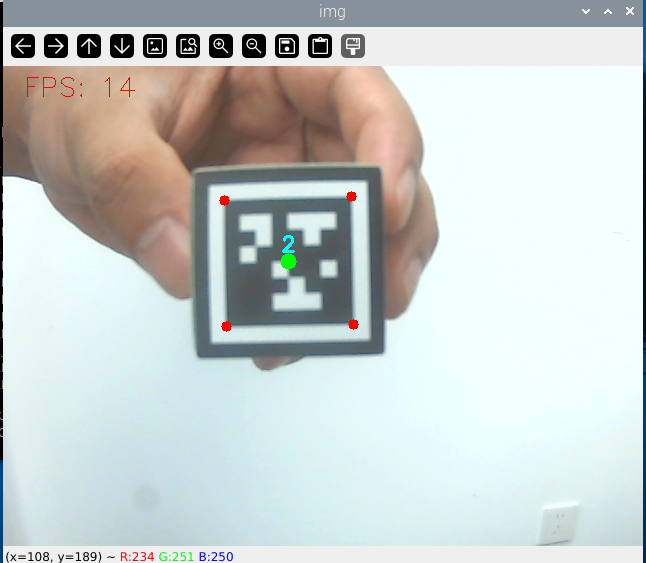
After the program is started, the camera captures the image, puts the tag code into the camera screen, and the system will recognize and frame the four vertices of the tag code and display the ID number of the tag code. Then slowly move the position of the building block, and the car will move forward and backward, left and right with the building block.
Note: When the building blocks move, the label code should face the camera, and the movement speed should not be too fast to prevent the camera pan/tilt from failing to keep up.
11.2.3, Program Startup
Open a terminal and enter the following command to enter docker,
./docker_ros2.sh
The following interface appears, indicating that you have successfully entered docker

Enter the following command in the docker terminal to start the program
xxxxxxxxxxros2 launch yahboomcar_apriltag apriltag_follow.launch.py11.2.4, Source code
After entering the docker container, the source code of this function is located at,
Code path: /root/yahboomcar_ws/src/yahboomcar_apriltag/yahboomcar_apriltag/apriltag_follow.py
ximport rclpyfrom rclpy.node import Nodefrom sensor_msgs.msg import Imagefrom cv_bridge import CvBridgeimport cv2import yahboomcar_apriltag.fps as fpsimport numpy as npfrom yahboomcar_apriltag.vutils import draw_tagsfrom dt_apriltags import Detectorfrom yahboomcar_apriltag.PID import PositionalPIDfrom yahboomcar_apriltag.common import *from Raspbot_Lib import Raspbotimport math
class TagFollowNode(Node): def __init__(self): super().__init__('tag_follow_node') self.twist = Twist() self.pub_cmdVel = self.create_publisher(Twist,"/cmd_vel",1) self.h=0 self.scale = 1000 self.FollowLinePID = (60, 0, 20) self.linear = 0.05 self.PID_init() # 初始化 Raspbot 实例 self.bot = Raspbot() self.fps = fps.FPS() # 帧率统计器 self.bridge = CvBridge() self.yservo_pid = PositionalPID(0.8, 0.6, 0.01) # PID控制器用于Y轴 self.numx=self.numy=1 target_servox = 90 target_servoy = 25 self.bot.Ctrl_Servo(1,target_servox) self.bot.Ctrl_Servo(2,target_servoy) self.at_detector = Detector(searchpath=['apriltags'], families='tag36h11', nthreads=8, quad_decimate=2.0, quad_sigma=0.0, refine_edges=1, decode_sharpening=0.25, debug=0) self.subscription = self.create_subscription( Image, '/image_raw', self.image_callback, 100) self.subscription
def image_callback(self, ros_image): # cv_bridge try: cv_image = self.bridge.imgmsg_to_cv2(ros_image, desired_encoding='bgr8') except Exception as e: self.get_logger().error(f"Failed to convert image: {e}") return
# 使用 AprilTags 检测器 tags = self.at_detector.detect(cv2.cvtColor(cv_image, cv2.COLOR_BGR2GRAY), False, None, 0.025) tags = sorted(tags, key=lambda tag: tag.tag_id)
# 绘制标签 result_image = draw_tags(cv_image, tags, corners_color=(0, 0, 255), center_color=(0, 255, 0))
# 处理 AprilTags if len(tags) == 1: _, y, _, self.h = tags[0].bbox center_x =tags[0].center[0] if math.fabs(180 - (y + self.h/2)) > 20: #调试方块半径 Debug Block Radius self.yservo_pid.SystemOutput = y + self.h/2 self.yservo_pid.SetStepSignal(220) self.yservo_pid.SetInertiaTime(0.01, 0.1) target_valuey = int(650+self.yservo_pid.SystemOutput) target_servoy = int((target_valuey)/10) if target_servoy > 110: target_servoy = 110 if target_servoy < 0: target_servoy = 0 #self.bot.Ctrl_Servo(2, target_servoy) self.twist.linear.x = self.linear [z_Pid, _] = self.PID_controller.update([((center_x) - 320)*1.0/16, 0]) self.twist.angular.z = +z_Pid #self.get_logger().info('center = {} angular ={}'.format([(center_x)],[self.twist.angular.z])) #self.get_logger().info('h = {} '.format([h])) if(80<self.h<110):#调试目标半径70~90 Debug target radius 70~90 self.twist.angular.z =0.0 self.twist.linear.x= 0.0 elif(self.h>110):#调试目标半径90 Debug target radius 90 self.twist.linear.x= -self.linear elif(20<self.h<80): self.twist.linear.x= self.linear else: self.twist.angular.z =0.0 self.twist.linear.x= 0.0 else: self.twist.angular.z =0.0 self.twist.linear.x= 0.0 self.get_logger().info('h = {}linear = {} angular ={}'.format([self.h],[self.twist.linear.x],[self.twist.angular.z])) #print(self.twist.linear.x,self.twist.angular.z) self.pub_cmdVel.publish(self.twist)
# 更新并显示 FPS self.fps.update() self.fps.show_fps(result_image) cv2.imshow("result_image", result_image) key = cv2.waitKey(1) if key != -1: cv2.destroyAllWindows()
def PID_init(self): self.PID_controller = simplePID( [0, 0], [self.FollowLinePID[0] / 1.0 / (self.scale), 0], [self.FollowLinePID[1] / 1.0 / (self.scale), 0], [self.FollowLinePID[2] / 1.0 / (self.scale), 0]) def main(args=None): rclpy.init(args=args)
tag_follow_node = TagFollowNode()
try: rclpy.spin(tag_follow_node) except KeyboardInterrupt: tag_follow_node.bot.Ctrl_Servo(1, 90) tag_follow_node.bot.Ctrl_Servo(2, 25) pass
if __name__ == '__main__': main()