STM32-Serial Port Method
STM32-Serial Port MethodExperimental preparationExperimental purposeExperimental wiringExperimental steps and phenomenaExperimental source code
Experimental preparation
STM32 motherboard
8-channel patrol module
Several Dupont cables
STM32 needs to download the serial communication source code provided in the document
Experimental purpose
The content of this experiment is mainly to use the STM32 master to receive the data of the 8-channel patrol module through the serial port.
Experimental wiring
STM32 to serial port assistant If you are not using the black stm32 of Yabo, you need to use a usb to ttl module to connect to the computer. The wiring is described in the following table
| stm32 | usb to ttl |
|---|---|
| PA10 | TX |
| PA9 | RX |
| vcc | vcc |
| GND | GND |
| If you are using the Yabo black stm32, you can directly use type-c to connect to the computer's serial port assistant |
| STM32 | 8-channel line patrol module |
|---|---|
| PA2 | RX |
| PA3 | TX |
| 5V | 5V |
| GND | GND |
As shown in the figure:

Experimental steps and phenomena
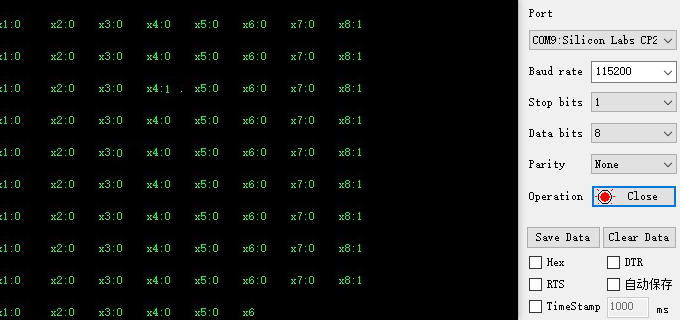
After connecting the wires, open the serial port assistant and you can see the numerical data of the infrared module. Set the baud rate to 115200. As shown below
Experimental source code
x
int main(){ SystemInit(); delay_init(); uart_init(115200); USART2_init(115200); delay_ms(1000);//Wait for infrared to be normal send_control_data(0,0,1); //Just send the corresponding command according to the protocol. This only receives numerical data. while(1) { if(g_new_package_flag == 1) { g_new_package_flag = 0; if(g_Dmode_Data == 1) { Deal_Usart_Data();//Numerical data processing printf("x1:%d,x2:%d,x3:%d,x4:%d,x5:%d,x6:%d,x7:%d,x8:%d\r\n",IR_Data_number[0],IR_Data_number[1],IR_Data_number[2],IR_Data_number[3],IR_Data_number[4],IR_Data_number[5],IR_Data_number[6],IR_Data_number[7]); } if(g_Amode_Data == 1) { Deal_Usart_AData();//Analog data processing printf("x1:%d,x2:%d,x3:%d,x4:%d,x5:%d,x6:%d,x7:%d,x8:%d\r\n",IR_Data_Anglo[0],IR_Data_Anglo[1],IR_Data_Anglo[2],IR_Data_Anglo[3],IR_Data_Anglo[4],IR_Data_Anglo[5],IR_Data_Anglo[6],IR_Data_Anglo[7]); } } }}SET_Eight_Mode(0,0,1);:The first parameter of this function is the calibration mode (0: exit calibration mode 1: enter calibration mode) The second parameter is whether to receive analog data The third parameter is whether to receive numerical data. This routine only provides parsing of numerical data. If you need to parse analog data, you can parse it yourself according to the protocol. The serial port parsing file of this project also has a function for parsing analog values. You can refer to it and call the Deal_Usart_AData function.