1. Hand detection
1.1. Introduction
MediaPipe is an open-source data stream processing machine learning application development framework developed by Google. It is a graph-based data processing pipeline used to build data sources in various forms, such as video, audio, sensor data, and any time series data. MediaPipe is cross-platform and can run on embedded platforms (Raspberry Pi, etc.), mobile devices (iOS and Android), workstations and servers, and supports mobile GPU acceleration. MediaPipe provides cross-platform, customizable ML solutions for real-time and streaming media. The core framework of MediaPipe is implemented in C++ and supports languages such as Java and Objective C. The main concepts of MediaPipe include packets, streams, calculators, graphs, and subgraphs.
Features of MediaPipe:
- End-to-end acceleration: built-in fast ML inference and processing can be accelerated even on commodity hardware.
- Build once, deploy anywhere: unified solution for Android, iOS, desktop/cloud, web and IoT.
- Ready-to-use solution: cutting-edge ML solution that demonstrates the full capabilities of the framework.
- Free and open source: framework and solution under Apache2.0, fully extensible and customizable.
1.2, MediaPipe Hands
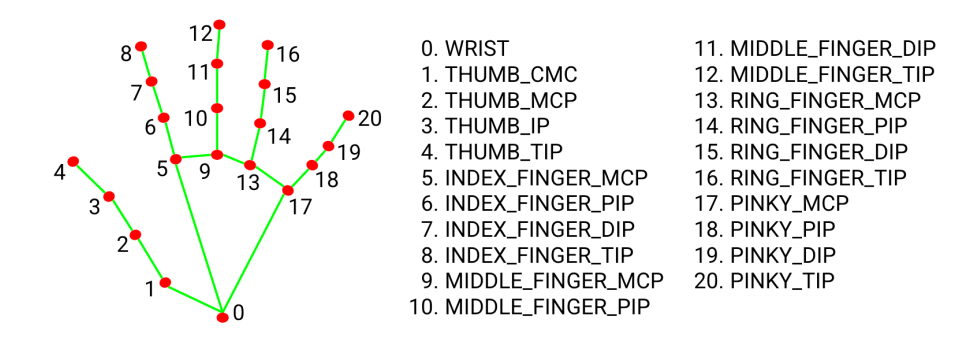
MediaPipe Hands is a high-fidelity hand and finger tracking solution. It uses machine learning (ML) to infer 21 3D coordinates of the hand from a frame.
After palm detection for the entire image, the 21 3D hand joint coordinates in the detected hand area are accurately located by regression based on the hand marker model, that is, direct coordinate prediction. The model learns a consistent internal hand pose representation that is robust even to partially visible hands and self-occlusions.
To obtain ground truth data, ~30K real-world images were manually annotated with 21 3D coordinates, as shown below (Z values were taken from the image depth map, if available for each corresponding coordinate). To provide better coverage of possible hand poses and provide additional supervision on the properties of the hand geometry, high-quality synthetic hand models were also drawn against various backgrounds and mapped to the corresponding 3D coordinates.
1.3, Hand detection
1.3.1, Start
Start the camera
ros2 launch ascamera hp60c.launch.py
Open a new terminal and enter,
xxxxxxxxxxros2 run yahboomcar_mediapipe 01_HandDetector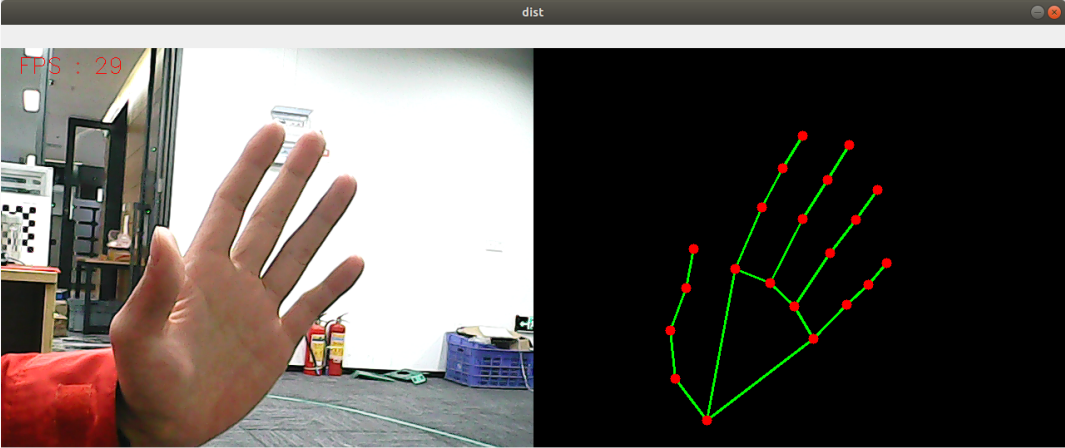
1.3.2, Source code
Source code location: ~/ascam_ros2_ws/src/yahboomcar_mediapipe/yahboomcar_mediapipe/01_HandDetector.py
x#!/usr/bin/env python3# encoding: utf-8#import ros libimport rclpyfrom rclpy.node import Nodefrom geometry_msgs.msg import Pointfrom sensor_msgs.msg import Imagefrom cv_bridge import CvBridgeimport mediapipe as mp#import define msgfrom yahboomcar_msgs.msg import PointArray#import common libimport cv2 as cvimport numpy as npimport timeimport osprint("import done")class HandDetector(Node): def __init__(self, name, mode=False, maxHands=2, detectorCon=0.5, trackCon=0.5): super().__init__(name) self.mpHand = mp.solutions.hands self.mpDraw = mp.solutions.drawing_utils self.hands = self.mpHand.Hands( static_image_mode=mode, max_num_hands=maxHands, min_detection_confidence=detectorCon, min_tracking_confidence=trackCon) self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=6) self.drawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 255, 0), thickness=2, circle_radius=2) # Create publisher to publish hand points self.pub_point = self.create_publisher(PointArray, '/mediapipe/points', 1000) # Initialize CvBridge to convert ROS images to OpenCV format self.bridge = CvBridge() # Subscribe to the image topic self.create_subscription(Image, '/ascamera_hp60c/camera_publisher/rgb0/image', self.image_callback, 10) self.pTime = 0 # Initialize pTime to calculate FPS self.exit_flag = False # Flag to indicate exit condition def image_callback(self, msg): # Convert ROS image message to OpenCV format frame = self.bridge.imgmsg_to_cv2(msg, desired_encoding='bgr8') frame, img = self.pubHandsPoint(frame, draw=False) # Display FPS and combine frames cTime = time.time() fps = 1 / (cTime - self.pTime) self.pTime = cTime text = "FPS : " + str(int(fps)) cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1) # Combine the frames (original and landmark drawn image) dist = self.frame_combine(frame, img) # Check if 'q' is pressed to exit the program if cv.waitKey(1) & 0xFF == ord('q'): self.exit_flag = True # Display the final image cv.imshow('dist', dist) def pubHandsPoint(self, frame, draw=True): pointArray = PointArray() img = np.zeros(frame.shape, np.uint8) img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB) self.results = self.hands.process(img_RGB) if self.results.multi_hand_landmarks: for i in range(len(self.results.multi_hand_landmarks)): if draw: self.mpDraw.draw_landmarks(frame, self.results.multi_hand_landmarks[i], self.mpHand.HAND_CONNECTIONS, self.lmDrawSpec, self.drawSpec) self.mpDraw.draw_landmarks(img, self.results.multi_hand_landmarks[i], self.mpHand.HAND_CONNECTIONS, self.lmDrawSpec, self.drawSpec) for id, lm in enumerate(self.results.multi_hand_landmarks[i].landmark): point = Point() point.x, point.y, point.z = lm.x, lm.y, lm.z pointArray.points.append(point) self.pub_point.publish(pointArray) return frame, img def frame_combine(self, frame, src): if len(frame.shape) == 3: frameH, frameW = frame.shape[:2] srcH, srcW = src.shape[:2] dst = np.zeros((max(frameH, srcH), frameW + srcW, 3), np.uint8) dst[:, :frameW] = frame[:, :] dst[:, frameW:] = src[:, :] else: src = cv.cvtColor(src, cv.COLOR_BGR2GRAY) frameH, frameW = frame.shape[:2] imgH, imgW = src.shape[:2] dst = np.zeros((frameH, frameW + imgW), np.uint8) dst[:, :frameW] = frame[:, :] dst[:, frameW:] = src[:, :] return dst def run(self): # Custom loop for handling ROS 2 callback and OpenCV events while rclpy.ok() and not self.exit_flag: rclpy.spin_once(self) # Process one callback if self.exit_flag: break cv.destroyAllWindows()def main(): print("start it") rclpy.init() hand_detector = HandDetector('hand_detector') try: hand_detector.run() except KeyboardInterrupt: pass finally: hand_detector.destroy_node() rclpy.shutdown()if __name__ == '__main__': main()