Gmapping mapping
Note: The virtual machine needs to be in the same LAN as the car, and the ROS_DOMAIN_ID needs to be consistent. You can check [Must read before use] to set the IP and ROS_DOMAIN_ID on the board.
1. Introduction to Gmapping
gmapping is only applicable to points where the number of two-dimensional laser points in a single frame is less than 1440. If the number of laser points in a single frame is greater than 1440, then [[mapping-4] process has died] will occur.
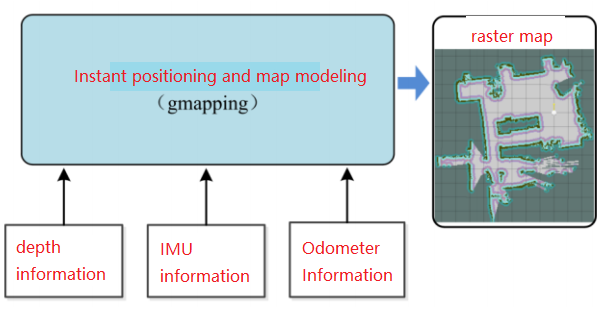
Gmapping is a commonly used open source SLAM algorithm based on the filtered SLAM framework.
Gmapping is based on the RBpf particle filter algorithm, which separates the real-time positioning and mapping processes. Positioning is performed first and then mapping is performed.
Gmapping has made two major improvements on the RBpf algorithm: improved proposal distribution and selective resampling.
Advantages: Gmapping can construct indoor maps in real time. The amount of calculation required to construct small scene maps is small and the accuracy is high.
Disadvantages: As the scene grows, the number of particles required increases because each particle carries a map, so the amount of memory and computation required to build a large map increases. Therefore it is not suitable for building large scene maps. And there is no loop detection, so the map may be misaligned when the loop is closed. Although increasing the number of particles can close the map, it comes at the expense of increased calculations and memory.
2. Program function description
Connect the car to the agent and run the program. The mapping interface will be displayed in rviz. Use the keyboard or handle to control the movement of the car until the map is completed. Then run the save map command to save the map.
3. Start and connect to the agent
Taking the supporting virtual machine as an example, enter the following command to start the agent:
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:humble udp4 --port 8090 -v4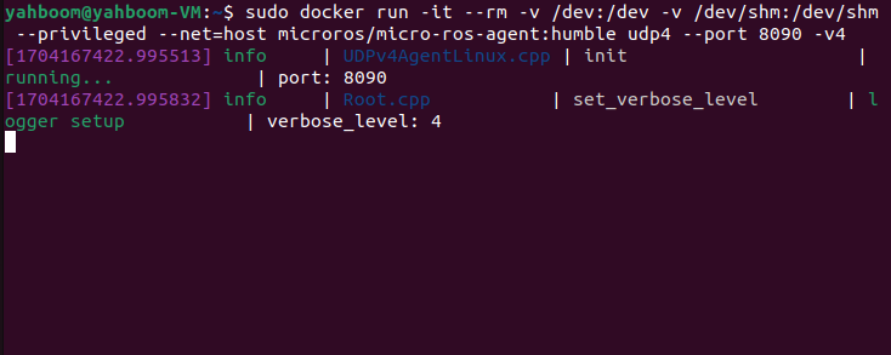
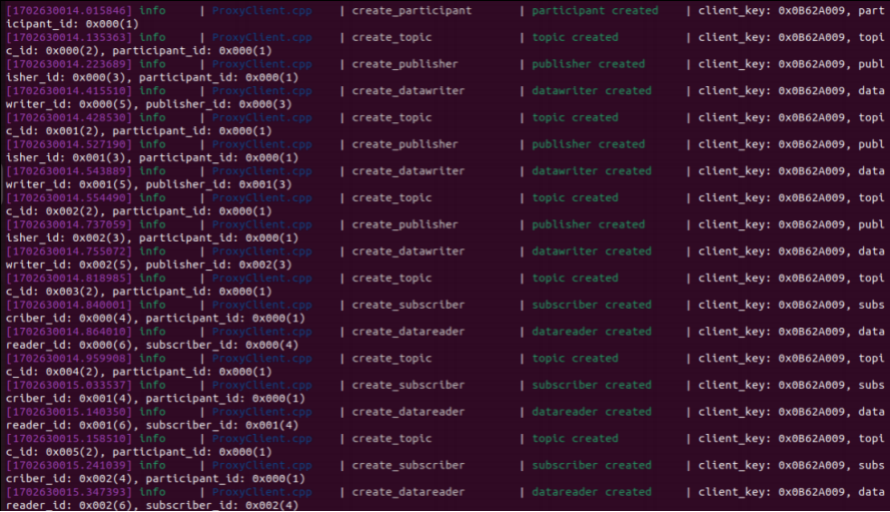
Then, turn on the car switch and wait for the car to connect to the agent. The connection is successful, as shown in the figure below.
4. Start the program
First, start the car to process the underlying data program and enter the terminal.
xxxxxxxxxxros2 launch yahboomcar_bringup yahboomcar_bringup_launch.py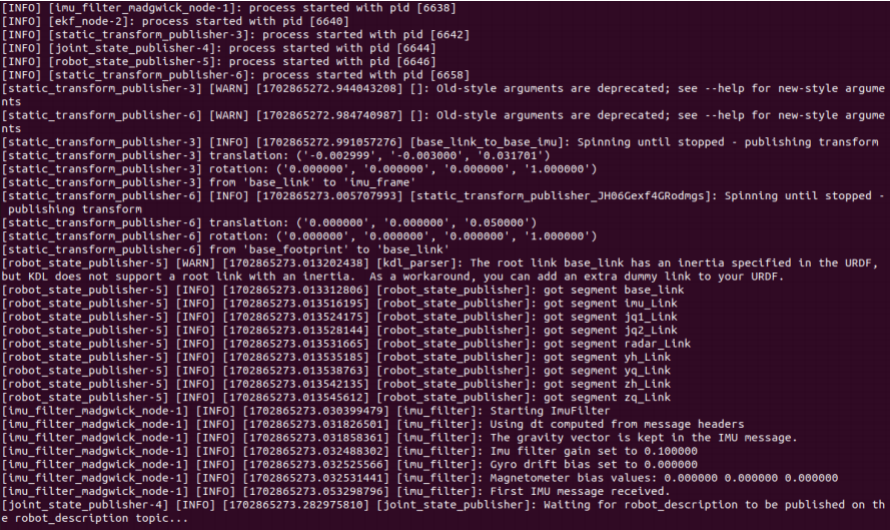
Then, start rviz, visualize the mapping, and enter in the terminal.
xxxxxxxxxxros2 launch yahboomcar_nav display_launch.py
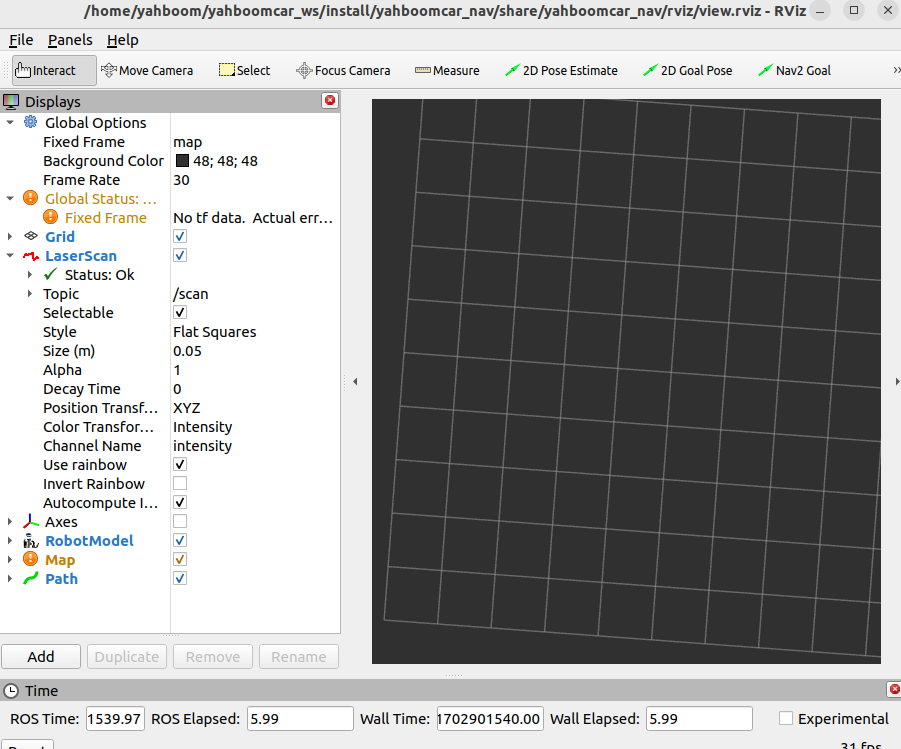
The mapping node has not been run yet, so there is no data. Next, run the mapping node and enter in the terminal,
xxxxxxxxxxros2 launch yahboomcar_nav map_gmapping_launch.py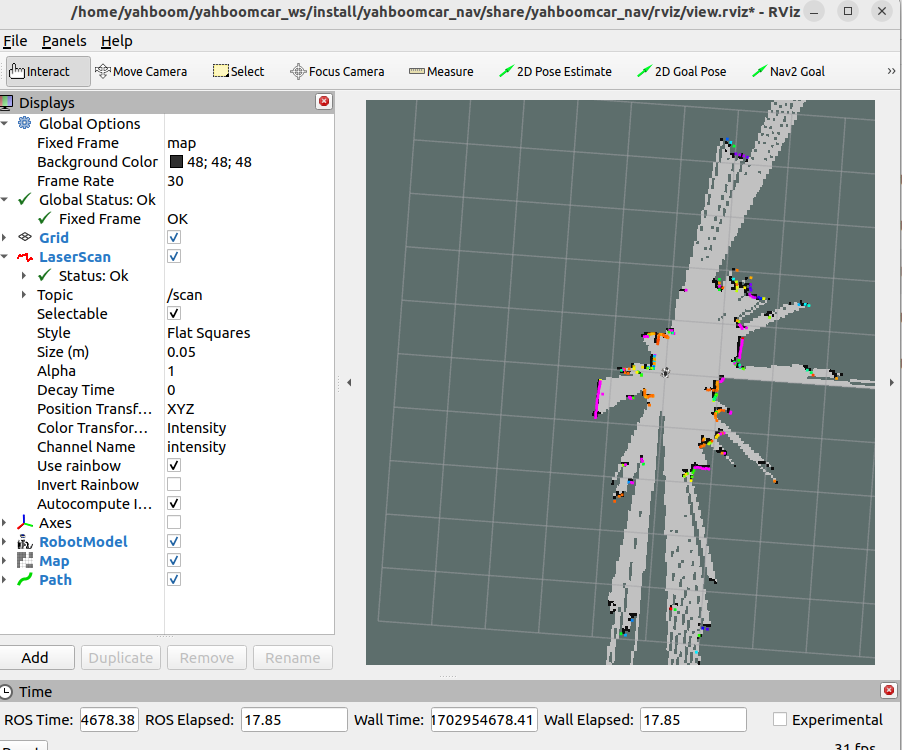
Then run handle control or keyboard control, choose one of the two, terminal input,
x
#keyboardros2 run yahboomcar_ctrl yahboom_keyboard#handleros2 run yahboomcar_ctrl yahboom_joyros2 run joy joy_nodeThen control the car and slowly walk through the area that needs to be mapped. After the map is completed, enter the following command to save the map and enter it in the terminal.
xxxxxxxxxxros2 launch yahboomcar_nav save_map_launch.py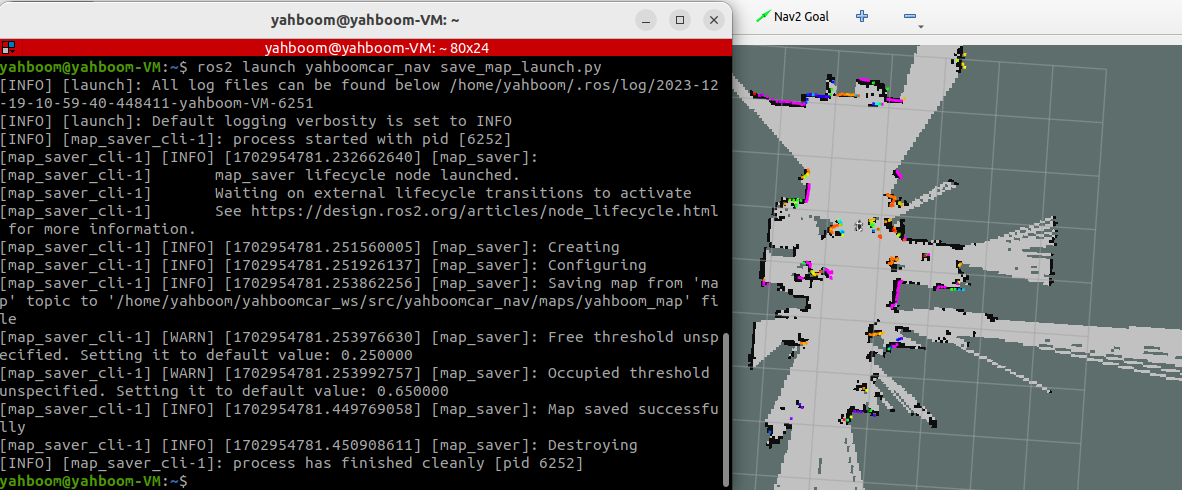
A map named yahboom_map will be saved. This map is saved in.
xxxxxxxxxx/home/yahboom/yahboomcar_ws/src/yahboomcar_nav/maps
Two files will be generated, one is yahboom_map.pgm and the other is yahboom_map.yaml. Take a look at the content of yaml.
x
imageyahboom_map.pgmmodetrinaryresolution0.05origin-10 -10 0negate0occupied_thresh0.65free_thresh0.25image:The picture representing the map, that is, yahboom_map.pgm
mode:This attribute can be one of trinary, scale or raw, depending on the selected mode. trinary mode is the default mode.
resolution:Map resolution, meters/pixel
origin:The 2D pose (x, y, yaw) in the lower left corner of the map, where yaw is rotated counterclockwise (yaw=0 means no rotation). Many parts of the current system ignore the yaw value.
negate:Whether to reverse the meaning of white/black and free/occupied (the interpretation of the threshold is not affected)
occupied_thresh:Pixels with an occupancy probability greater than this threshold will be considered fully occupied.
free_thresh:Pixels with an occupancy probability less than this threshold will be considered completely free.
5. View the node communication diagram
Terminal input,
xxxxxxxxxxros2 run rqt_graph rqt_graph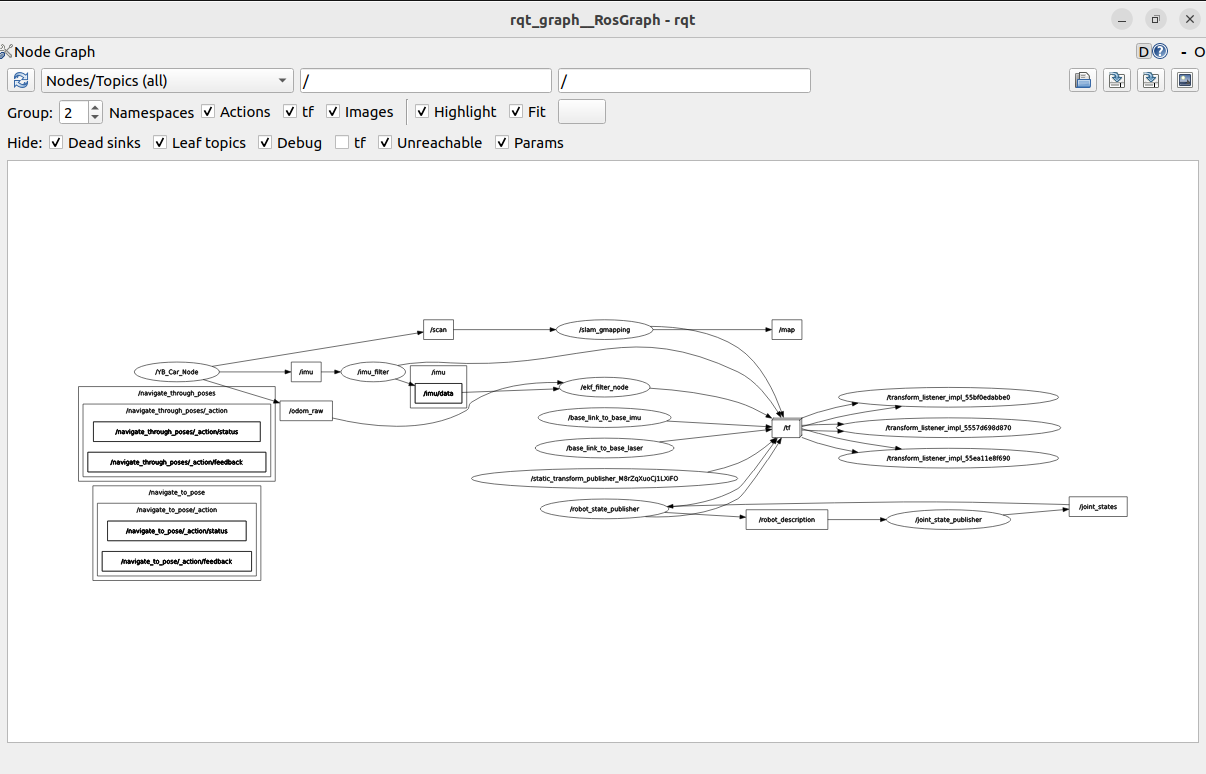
If it is not displayed at first, select [Nodes/Topics(all)], and then click the refresh button in the upper left corner.
6. View TF tree
Terminal input,
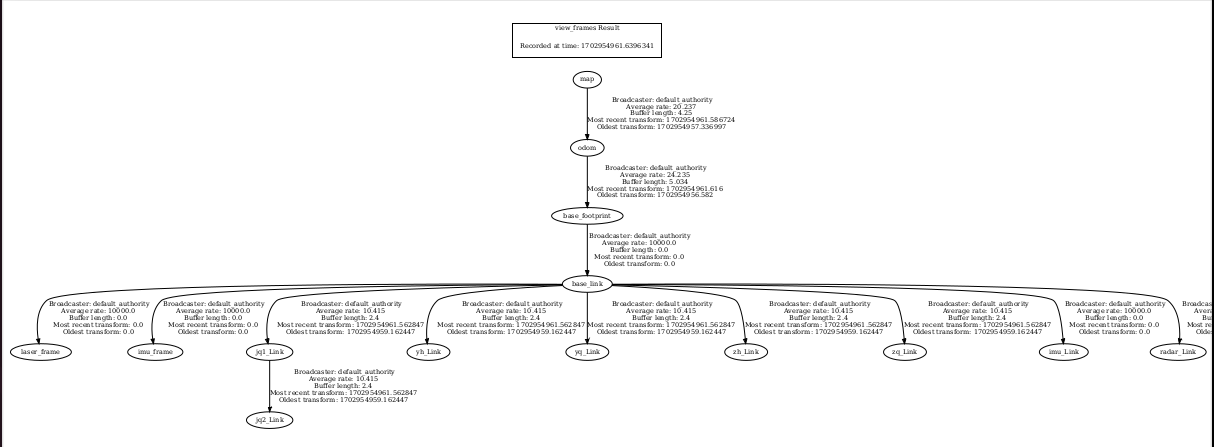
xxxxxxxxxxros2 run tf2_tools view_frames
After the operation is completed, two files will be generated in the terminal directory, namely .gv and .pdf files. The pdf file is the TF tree.
7. Code analysis
Here we only describe map_gmapping_launch.py for mapping. The file path is as follows
xxxxxxxxxx/home/yahboom/yahboomcar_ws/src/yahboomcar_nav/launchmap_gmapping_launch.py
x
from launch import LaunchDescriptionfrom launch_ros.actions import Nodeimport osfrom launch.actions import IncludeLaunchDescriptionfrom launch.launch_description_sources import PythonLaunchDescriptionSourcefrom ament_index_python.packages import get_package_share_directory
def generate_launch_description(): slam_gmapping_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource([os.path.join( get_package_share_directory('slam_gmapping'), 'launch'), '/slam_gmapping.launch.py']) )
base_link_to_laser_tf_node = Node( package='tf2_ros', executable='static_transform_publisher', name='base_link_to_base_laser', arguments=['-0.0046412', '0' , '0.094079','0','0','0','base_link','laser_frame'] ) return LaunchDescription([slam_gmapping_launch,base_link_to_laser_tf_node])
A launch file-slam_gmapping_launch and a node for publishing static transformation-base_link_to_laser_tf_node are started here. Take a detailed look at slam_gmapping_launch, the file is as follows
xxxxxxxxxx/home/yahboom/gmapping_ws/src/slam_gmapping/launchslam_gmapping.launch.py,
xxxxxxxxxxfrom launch import LaunchDescriptionfrom launch.substitutions import EnvironmentVariableimport launch.actionsimport launch_ros.actionsimport osfrom ament_index_python.packages import get_package_share_directory
def generate_launch_description(): return LaunchDescription([ launch_ros.actions.Node( package='slam_gmapping', executable='slam_gmapping', output='screen', parameters=[os.path.join(get_package_share_directory("slam_gmapping"), "params", "slam_gmapping.yaml")]), ])The slam_gmapping node is started here, and the slam_gmapping.yaml parameter file is loaded. The file is located (taking the supporting virtual machine as an example),
xxxxxxxxxx/home/yahboom/gmapping_ws/src/slam_gmapping/params
slam_gmapping.yaml
xxxxxxxxxx/slam_gmapping ros__parameters angularUpdate0.5 astep0.05 base_framebase_footprint map_framemap odom_frameodom delta0.05 iterations5 kernelSize1 lasamplerange0.005 lasamplestep0.005 linearUpdate1.0 llsamplerange0.01 llsamplestep0.01 lsigma0.075 lskip0 lstep0.05 map_update_interval5.0 maxRange6.0 maxUrange4.0 minimum_score0.0 occ_thresh0.25 ogain3.0 particles30 qos_overrides /parameter_events publisher depth1000 durabilityvolatile historykeep_all reliabilityreliable /tf publisher depth1000 durabilityvolatile historykeep_last reliabilityreliable resampleThreshold0.5 sigma0.05 srr0.1 srt0.2 str0.1 stt0.2 temporalUpdate1.0 transform_publish_period0.05 use_sim_timefalse xmax10.0 xmin-10.0 ymax10.0 ymin-10.0