3D object recognition
1. Experimental purpose
Realize the car to detect cups, chairs, shoes, cameras and other objects, and draw 3D results.
2. Experimental path source code
Enter the car system, end the car program, enter "ip (ip is the car's ip): 8888" in the browser, enter the password "yahboom" Then log in Enter the path Rider-pi_class/5.AI Visual Recognition Course/13. Three dimensional object recognition and run Objectron_USB.ipynb.
Or enter the command in the terminal and start the python script directly
cd /home/pi/Rider-pi_class/5.AI Visual Recognition Course/13. Three dimensional object recognitionpython3 Objectron_USB.py3. Experimental phenomenon
After running the source code, you can see that the car detects cups, chairs, shoes, and cameras.
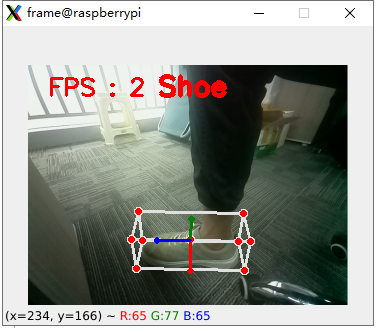
Press the "F" button to switch or press the button in the upper right corner of the car screen to switch and identify different targets. This experimental result only identifies shoes.
Note: The F button will only have a switching effect when running this source code in the terminal. The source code running in jupyter-lab is not effective.
4. Analysis of the main program source code
xif __name__ == '__main__': capture = cv.VideoCapture(0) capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G')) capture.set(cv.CAP_PROP_FRAME_WIDTH, 320) capture.set(cv.CAP_PROP_FRAME_HEIGHT, 240) print("capture get FPS : ", capture.get(cv.CAP_PROP_FPS)) pTime = cTime = 0 objectron = Objectron() while capture.isOpened(): ret, frame = capture.read() # frame = cv.flip(frame, 1) action = cv.waitKey(1) & 0xFF if action == ord('q'): break if action == ord('f') or action == ord('F') : objectron.configUP() # Press the button on the screen to switch if button.press_d(): objectron.configUP() frame = objectron.findObjectron(frame) cTime = time.time() fps = 1 / (cTime - pTime) pTime = cTime text = "FPS : " + str(int(fps)) cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.8, (0, 0, 255), 2) cv.imshow('frame', frame) #Display the image on the LCD screen b, g, r = cv.split(frame) image = cv.merge((r, g, b)) imgok = Image.fromarray(image) display.ShowImage(imgok) capture.release() cv.destroyAllWindows()From the source code analysis, it can be seen that the car will call the camera and the recognition model to determine the recognized target. If it is a target in the model, the recognition result will be displayed on the screen of the computer and the car, and the target to be recognized can be switched through the button in the upper right corner of the car.